
Fターム[3D041AA31]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 走行性の向上 (1,351)
Fターム[3D041AA31]の下位に属するFターム
Fターム[3D041AA31]に分類される特許
81 - 100 / 352
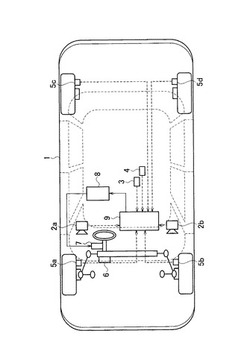
運転操作支援装置及び運転操作支援方法
【課題】回避制御に対し運転者が感じる違和感を低減する。
【解決手段】マイクロプロセッサ9が、ステレオカメラ2a,2b、加速度センサ3、ヨーレートセンサ4、車輪速センサ5a,5b,5c,5d、及び操舵角センサ6から入力された情報に基づいて、操舵操作入力の時系列データδSR*に関する評価重みwfを相対的に変更する。これにより、車両1の外界環境や車両状態に応じた適切な操舵操作量が算出されることにより、回避制御に対し運転者が感じる違和感を低減できる。
(もっと読む)
作業車両

【課題】作業車両において、作業部駆動直後に発生する高トルクに起因して、エンジン出力軸の折損やクラッチに対する伝動ベルトの焼き切れ等を招来するおそれを解消すると共に、作業効率の維持向上を図ることを目的とする。
【解決手段】本願発明の作業車両は、走行機体に搭載されたエンジンからの動力を、油圧無段変速機を介して走行部に伝達する一方、作業部には直接伝達するように構成されており、前記作業部への動力伝達を入り切りする作業クラッチと、前記作業クラッチの入り切りを操作するクラッチ操作部材とを備える。前記クラッチ操作部材を入り操作したときは、エンジン回転数を予め設定された目標回転数まで低下させながら、前記油圧無段変速機を増速方向に駆動させて前記走行部の走行速度を維持するように構成する。
(もっと読む)
車両挙動制御装置
【課題】路面状況に応じて車両のヨー運動とサスペンションの減衰力の制御を行うことで、車両挙動特性と乗心地性を向上する車両挙動制御装置を提供する。
【解決手段】本発明にかかる車両挙動制御装置は、車両の車体と前輪および後輪との間に介装され、減衰力可変機構を備えたサスペンション装置と、前輪または該後輪の少なくとも一方における該左右輪の駆動力を調整する第1のヨー運動調整手段と、輪間での差動制限度合を調整する第2のヨー運動調整手段と、路面の状況に応じて第1及び第2のヨー運動調整手段を制御して車両のヨー運動を制御するとともに、減衰力可変機構を制御して減衰力可変機構の減衰力を調整する制御手段とを有する。
(もっと読む)
車両挙動制御装置
【課題】左右の後輪の一方のトー角が制御不能になった場合において、車両挙動をすばやく安定化させることが可能な車両挙動制御装置を提供する。
【解決手段】車両挙動制御装置30Aは、左右の後輪WRL,WRRの一方に対応する後輪トー角変更部21L,21Rが失陥した場合に、左右の後輪WRL,WRRの一方に対応する後輪トー角検出部22L,22Rの検出結果に基づいて、左右の後輪WRL,WRRの他方に対応する後輪トー角変更部21L,21Rを制御することによって、左右の後輪WRL,WRRの他方のトー角を左右の後輪WRL,WRRの一方のトー角に合わせて左右の後輪WRL,WRRの合計トー角をゼロにするとともに、前輪転舵部23を制御することによって、左右の後輪WRL,WRRのトー角によるヨーレートを打ち消すように左右の前輪WFL,WFRを転舵させる。
(もっと読む)
車両制御装置
【課題】RTCの制御と左右前輪の駆動力配分の制御とを組み合わせて、車両の安定化と旋回のしやすさとを併せて実現させることができる車両制御装置を提供する。
【解決手段】低速走行時は、駆動力配分装置200の制御ゲインを、駆動力配分制御ゲイン可変手段200tにより増加し、かつRTC装置120の制御ゲインを、RTCゲイン可変手段120tにより減少することにより、走行中の車両の旋回性能を向上させる。また、高速走行時は、駆動力配分装置200の制御ゲインを、駆動力配分制御ゲイン可変手段200tにより減少し、かつRTC装置120の制御ゲインを、RTCゲイン可変手段120tにより増加することにより、走行中の車両の安定性能を向上させる。
(もっと読む)
車両用走行制御装置及びその方法
【課題】車線逸脱防止制御が作動し、かつ4WD状態になっている場合に、それら車線逸脱防止制御の作動及び4WD状態を適切に終了させる。
【解決手段】車両用走行制御装置は、制駆動力を制御して自車両にヨーモーメントを付与し走行車線に対する自車両の逸脱を防止する車線逸脱防止制御が作動し、かつ前後輪の駆動トルクを制御する4WD制御が作動している場合において(ステップS51、ステップS52)、車線逸脱防止制御の作動が終了し、かつ4WD制御の作動が終了するときには、それら終了が同時になされることを禁止する(ステップS53〜ステップS56)。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】回避制御に対し運転者が感じる違和感を低減する。
【解決手段】車両制御コントローラ14が、回避経路の設定可能範囲の大きさに基づいて、回避制御に対する運転者の車両操作の寄与度を決定し、操舵角プロフィールと寄与度に応じてブレーキアクチュエータ12と操舵アクチュエータ13を制御することにより、回避経路に沿って車両1が走行し、且つ、運転者の車両操作が寄与度に応じた抑制度合いになるように操舵角,アクセル開度,及び制動液圧を制御する。これにより、回避経路の範囲の大きさ及び回避制御に対する運転者の回避操作の影響を考慮して回避制御が実行されるので、回避制御に対し運転者が感じる違和感を低減することができる。
(もっと読む)
車両の駆動トルク制御装置
【課題】エンジンにより駆動される補機の機能への影響をできるだけ抑えつつ車両の駆動トルクが所要の値になるようエンジンの出力トルク及び補機の消費トルクを制御する。
【解決手段】車両の目標駆動トルクTvtが演算され(ブロック100〜120)、目標駆動トルクの低周波成分がエンジン14の目標制御トルクに分配されると共に、低周波成分以外の目標駆動トルクの成分が補機としてのコンプレッサ34及びオルタネータ36の目標制御トルクに分配される(ブロック130)。そしてエンジンの目標制御トルクTetと補機の必要消費トルクTcreq、Tareqとの和に基づいてエンジンの出力トルクが制御され、補機の必要消費トルクより補機の目標制御トルクを減算した値に基づいて補機の消費トルクが制御される(ブロック150〜180)。
(もっと読む)
車両の駆動トルク制御装置
【課題】車両の目標駆動トルクが比較的高い周波数にて変動する場合にも、車両の駆動トルクが車両の目標駆動トルクになるようエンジンの出力トルク及び複数の補機の消費トルクを最適に制御する。
【解決手段】車両の目標駆動トルクが演算され(ブロック100〜120)、カットオフ周波数が低いローパスフィルタの処理により目標駆動トルクの低周波成分がエンジン14の目標制御トルクに分配され、カットオフ周波数が高いローパスフィルタの処理により目標駆動トルクの中間周波数の成分がコンプレッサ34の目標制御トルクに分配され、目標駆動トルクの残余の成分がオルタネータ36の目標制御トルクに分配される(ブロック130)。そしてエンジンの出力トルク及びコンプレッサ34、オルタネータ36の必要消費トルクが対応する目標制御トルクに基づいて制御される(ブロック150〜180)。
(もっと読む)
車両
【課題】先行車両に対して安定した並走追従走行をすること。
【解決手段】追従車両3は、前後方向の制御と左右方向の制御を行うことにより、先行車両2に対して並走追従走行を行う。前後方向の制御は、フィードバック制御と、フィードフォワード制御を行う。フィードフォワード制御では、先行車両2から送信されてくる目標車速を、先行車両2が旋回する際に、追従車両3が先行車両2の内外周を走行することによる速度の増減で補正した値を用いる。左右方向の制御では、方位角φと相対角θを収束させる。この際に、追従車両3は、自車両の代表点7から先行車両2に対する目標点5までの目標点距離Δmを用いて、φとθの何れを優先的に制御するかを判断する。更に、目標点距離Δmが小さい場合、即ち、追従車両3と先行車両2が近接している場合には、φを制御する際のゲインを小さくする。
(もっと読む)
運転支援システム
【課題】追従走行制御時にて車両の燃費性能を向上できる運転支援システムを提供すること。
【解決手段】この運転支援システム1は、自車と前車との車間距離を所定の目標車間距離に制御する追従走行制御ならびに自車の車速を所定の目標車速に制御する車速維持制御を行い得る。運転支援システム1は、前車の速度変動を判定する速度変動判定手段32と、先方車両の車速を取得する先方車両車速取得手段23と、自車の目標車速を再設定する目標車速再設定手段33とを備える。そして、前車の速度変動が所定の閾値よりも大きいと判定されたときに、追従走行制御が中断あるいは中止される。また、自車の目標車速が先方車両の車速に基づき再設定されて車速維持制御が行われる。
(もっと読む)
動力装置
【課題】左右の被駆動部の回転を容易に精度良く制御できることで、ドライバビリティを向上させることができる動力装置を提供する。
【解決手段】動力装置1では、互いの間で動力を伝達可能で、動力の伝達中、互いの間に回転数に関する共線関係を保ちながら回転し、その速度共線図において順に並ぶように構成された第1要素S1、第2要素C1、R3、第3要素R1、R2、C3、第4要素C2、S3および第5要素S2はそれぞれ、第1回転機11の第1ロータ13、左右の被駆動部WFL,WFRの一方、原動機3の出力部3a、左右の被駆動部WFL,WFRの他方、および第2回転機21の第2ロータ23に機械的に連結され、第3回転機31の第3ロータ33は、原動機3の出力部3aに機械的に連結されており、第1回転機11と第3回転機31、および、第2回転機21と第3回転機31はそれぞれ、互いに電気的に接続されている。
(もっと読む)
加速度制御装置及び加速度制御プログラム
【課題】車両の走行状態に応じて生じ得る加速度制御の遅れを抑制する。
【解決手段】減速操作を終えた直後にドライバ要求加速度を上回るACC要求加速度で加速度制御(ACC)が開始された場合、従来の制御(a)では、ACC開始時点での実加速度をジャーク制限後要求加速度の初期値としてジャーク制限が行われるため、ACC要求加速度は加速を要求しているにもかかわらす、時刻t1から時刻t2まで不要な減速を行ってしまう。これに対し、本発明の制御(b)では、加速度制御が開始された時点での実加速度及びドライバ要求加速度のうち、ACC要求加速度との差が小さい方をジャーク制限後要求加速度の初期値として設定する。このため、ドライバ要求加速度が初期値として設定されることとなり、実加速度がドライバ要求加速度まで迅速に上昇することの妨げにならない。
(もっと読む)
車両の制御装置
【課題】路面状態に応じた走行モードの切替中におけるドライバビリティの悪化を防止し、かつ、従来の車両に低コストで追加可能な、動力分配機構と連携した電子制御を行う車両の制御装置を提供すること。
【解決手段】ECUのCPUは、走行モードの入力があった場合(ステップS13でYes)、入力された走行モードに応じて動力分配機構の切替を指示し(ステップS14)、動力制御機構については、記憶した走行モードに応じて制御を行う(ステップS15)。動力分配機構の切替が完了したと判定した場合には(ステップS16でYes)、入力された走行モードに応じて、動力制御機構の特性を切り替えるが、動力分配機構の切替を指示してから、切替が完了しないまま一定の時間が経過したと判定した場合には(ステップS18でYes)、動力制御機構の特性を、記憶した走行モード(ステップS12)に対応する特性に維持する(ステップS19)。
(もっと読む)
車速制御装置
【課題】運転者の感覚に合った走行が可能な適切な目標車速に変更できる車速制御装置を提供することを課題とする。
【解決手段】目標車速に基づいて車両の車速を制御する車速制御装置であって、運転者の特性を推定する運転者特性推定手段と、走行中の道路形状を取得する道路形状取得手段と、運転者特性推定手段で推定した運転者の特性と道路形状取得手段で取得した道路形状に基づいて目標車速を変更する目標車速変更手段とを備えることを特徴とする。
(もっと読む)
加減速制御装置
【課題】運転者の加減速意図に沿う制御量で車両を加減速させる加減速制御装置を提供する。
【解決手段】加減速制御装置6は、自車両1の前後加減速度を制御する前後加減速制御部400と、前後加減速制御部400に制御介入して前後加減速度を補正する補正制御部500と、補正制御部500による制御介入を許可または禁止する制御介入許可判断部300を有する。そして、自車両1の横加々速度に基づき自車両1の前後加減速度を補正し、自車両1の前後加減速度の補正を所定条件に基づき許可または禁止する処理を行う。これにより、自車両1の動作を、より運転者の加減速意図に沿ったものとし、前後加減速度の補正制御に起因した運転者の違和感を低減する。
(もっと読む)
作業車両の制御装置
【課題】発進と走行停止、前進と後進の切換などの各操作を、操作レバー232の変速操作にて簡単に実行できる作業車両の制御装置を提供するものである。
【解決手段】走行車輪3,4を備えた走行機体2に搭載されたエンジン5からの動力を変速する油圧式無段変速機29と、油圧式無段変速機29の変速比を変更する操作レバー232と、油圧式無段変速機29からの変速駆動出力を前記走行車輪3,4に伝達する走行用クラッチ40,42と、走行車輪3,4を制動するブレーキ65とを備えてなる作業車両において、操作レバー232の前進操作又は後進操作によって走行用クラッチ40,42が入り作動した状態で、走行車輪3,4のブレーキ解除が確認されたときに、操作レバー232の操作量に応じて、予め設定した変速比パターンに基づき、油圧式無段変速機29の出力回転数が制御されるように構成したものである。
(もっと読む)
車両の制御装置
【課題】複数の要求値の調停処理を繰り返して制御目標値を設定する車両において、要求値の追加あるいは削除を行なう際の調停処理ロジックの変更量を低減する。
【解決手段】この制御装置は、PDRM9010および複数の駆動力要求システム(9030〜9033)からの要求駆動力を調停する駆動力調停部9020と、ギヤ段変換部9110および複数のギヤ段要求システム(9130〜9132)からの要求ギヤ段を調停するギヤ段調停部9120と、トルク変換部9210および複数のトルク要求システム(9230、9231)からの要求トルクを調停するトルク調停部9220とを備える。さらに、この制御装置は、各要求システムで設定された要求値の各々に、各調停処理で共通して用いられる優先順位を付与するID付与部9300を備える。
(もっと読む)
車速制御装置
【課題】運転者の意思に応じた目標車速を設定する車速制御装置を提供することを課題とする。
【解決手段】目標車速に基づいて自車の車速を制御する車速制御装置1であって、運転者の減速操作を検出する減速操作検出手段12と、減速操作検出手段12で検出した減速操作に基づいて自車の目標車速を設定する目標車速設定手段34と、自車周辺の物体を検出する周辺物体検出手段10,11,32とを備え、目標車速設定手段34は、周辺物体検出手段10,11,32で自車周辺の先行車以外の物体を検出した場合、減速操作に基づく目標車速の設定を行わないことを特徴とする。
(もっと読む)
車両の車線逸脱警報装置
【課題】自車両が走行している車線の走行区分線を検知することで、自車両の走行環境に応じて走行安全性と頻繁な警報作動の防止との両立を図ることができる車両の車線逸脱警報装置を提供する。
【解決手段】S10の判定の結果、Noの場合、左走行区分線Laが実線で右走行区分線Laが破線か否か判定し、Yesの場合、右側方或いは右斜め後に他車両CBが走行しているか否か判定する。S19の判定の結果、右側方或いは右斜め後に他車両CBが存在しない場合、左走行区分線Laに対して第2判定ラインLd2、右走行区分線Laに対して第1判定ラインLd1を夫々設定し、S5の車線逸脱判定ステップに移行する。
(もっと読む)
81 - 100 / 352
[ Back to top ]