
Fターム[3D041AA31]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 走行性の向上 (1,351)
Fターム[3D041AA31]の下位に属するFターム
Fターム[3D041AA31]に分類される特許
101 - 120 / 352
運転支援装置、運転支援方法および運転支援プログラム
【課題】車速を所望の車速に収束させることが困難であるとともに過度に加減速が繰り返されてスムーズに走行することができない。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、前記所定区間を前記目標車速で走行するために前記自車両を前記目標車速とすべき目標地点に到達する前に前記自車両の変速比を前記加速変速比に設定させ、前記目標地点から前記所定区間の終了地点まで前記自車両の車速が前記目標車速以下となるように制御するとともに、前記目標地点に到達する前に前記自車両の車速が前記目標車速と一致した場合に、当該一致した一致地点から前記所定区間の終了地点まで前記自車両の車速が前記目標車速以下となるように制御する。
(もっと読む)
車両用走行路面検出装置

【課題】簡単な構成でかつ小さい処理負担で、自車両が走行する走行路面の勾配状態を検出できるようにする。
【解決手段】第1地点で撮像された第1画像中の走行路面に基づいて、上記第1地点から該第1地点に対して所定距離先にある第2地点まで同じ勾配が継続すると仮定して、その仮想走行路面での第2地点の走行路幅を第1走行路幅として算出し(ステップS3,S4)、第2地点の手前近傍の地点に達したときに撮像された第2画像中の走行路面に基づいて第2地点の走行路幅を第2走行路幅として算出し(ステップS8,S9)、上記第1走行路幅と上記第2走行路幅との大小関係に基づいて、第2地点での走行路面の勾配状態を判定する(ステップS10)。
(もっと読む)
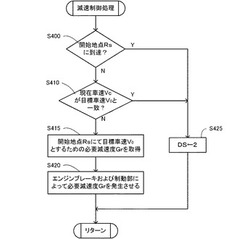
運転支援装置、運転支援方法および運転支援プログラム
【課題】自動で減速を行うための制御を実施している過程にて当該自動制御を中止した場合であっても安定した走行を行わせること。
【解決手段】自車両の制御状態が自動制御に設定されている場合に、前記自車両の減速量を制御して前記自車両の車速を所定の目標車速まで減速させ、前記減速量を所定の基準に対応した変化量で変化させて前記自動制御から前記手動制御へ移行させる。
(もっと読む)
車両の定速走行制御装置
【課題】制御系の制御対象をスロットル開度と変速比の2つを入力、車速を出力とするモデルで記述することにより、スロットル開度と変速比を協調させて定速走行制御を行うようにした定速走行制御装置を提供する。
【解決手段】エンジンと、その出力を変速する変速機と、それらが搭載される車体とを少なくとも備えた車両の定速走行制御装置において、車両システムを制御対象とし、少なくとも変速比とスロットル開度とを入力、車速を出力とするモデルで記述すると共に、車速が目標車速に一致するように、変速比とスロットル開度を制御する制御系(定速走行制御コントローラ)を備えると共に、制御系の指令に応じてエンジンのスロットルバルブを駆動してスロットル開度を調整するDBW機構と、変速機に油圧を供給する油圧機構などを備える。
(もっと読む)
車両用減速制御装置及びその方法
【課題】分岐点でのカーブの状態に適合させて、減速制御を実施する。
【解決手段】車両用減速制御装置は、ナビゲーション装置14で地図情報の作成に使用するノード点を複数個用いて、車両前方の走行路の旋回半径を算出するナビゲーション情報処理部43と、ナビゲーション情報処理部43が算出した旋回半径を基に、自車両を減速制御する制駆動力コントロールユニット8と、分岐点判定部61が自車両が走行する走路が分岐路であると判断したとき、該分岐路の所定範囲内のノード点の密度が小さくなるほど、減速制御のための目標減速度の抑制度合いを大きく補正する目標車速補正部62と、を備える。
(もっと読む)
車両およびその制御方法並びに駆動装置
【課題】降坂路を含む走行環境に関する走行環境条件が成立していてアクセルオフ時に、運転者の意図をより反映する。
【解決手段】所定の走行環境であるときのアクセルオフ時にSポジションからDポジションへのシフト変更操作であるSDシフト変更操作が行なわれたときには(S120)、シフトポジションSPがDポジションで所定の走行環境でないときと同様の目標制動トルクTr*に対応する制動力が車両に作用するようエンジンと二つのモータとブレーキアクチュエータとを制御する(S230〜S310)。これにより、シフトポジションSP(S1〜S6)に応じた制動力を車両に作用させることを要求していない(不要としている)と考えられる運転者の意図をより反映することができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】第2のモータジェネレータを切り離した状態で発生し得るドライバビリティや燃費の悪化を抑制する。
【解決手段】ハイブリッド車両の制御装置は、エンジン、第1及び第2のモータジェネレータが後輪に動力を伝達し、第3のモータジェネレータが前輪に動力を伝達する。動力伝達制御手段は、第2のモータジェネレータと駆動軸との間で動力伝達を行う動力伝達モードと当該動力伝達を解除する動力伝達解除モードとを切り替える。具体的には、動力伝達解除モードの設定時に、第3のモータジェネレータの稼動状態による全体のエネルギー効率に基づいて、動力伝達解除モードから動力伝達モードへの切り替えを行う。これにより、第2のモータジェネレータが切り離されている状態で発生し得るドライバビリティや燃費の悪化を適切に抑制することが可能となる。
(もっと読む)
車両用制御装置
【課題】車両用制御装置において重要度の高いがタスクの待ち時間が長い場合に、待ち時間を短縮する。
【解決手段】複数の各タスクに、実行順序の優先度に応じて設定した初期重み値を与え、該初期重み値に基づく実行順序に従って前記複数のタスクを実行する車両制御装置において、各タスクの重要度に応じて重み付け値(W)を付与しておき、実行待ちタスクの待ち時間に基づいてタスクの実行順序の優先度を変更する。
(もっと読む)
車両の走行制御装置
【課題】複数の制御モードを有する車両挙動制御に対し、クルーズ制御において、演算を複雑にすることなく車両挙動制御で選択された車両挙動特性に適合する出力特性を得ることができ、良好なドライバビリティを得る。
【解決手段】車両挙動制御部1は、ABS制御と横滑り防止制御とトラクション制御の全てを実行する通常モードと、ABS制御と制限した横滑り防止制御とトラクション制御を実行するトラクションモードと、ABS制御のみを実行するOFFモードの3つのモードが設定されており、モード切換スイッチ14でドライバにより選択される。一方、クルーズ制御部2には、モード切換スイッチ14に応じたそれぞれのモードに対応する上限ガード値が設定されており、クルーズ制御時は、この上限ガード値で目標車速を制限することで、通常運転時の車両挙動制御のモードに適合する出力特性を設定する。
(もっと読む)
車両運動制御装置及び車両照明灯制御装置
【課題】ドライバの思い描く目標ラインに車両を追従させ、より安定で操作性のよい車両運動制御装置を提供する。
【解決手段】車速Vcを検出する車速検出手段9と、車両の操舵角θstを検出する操舵角検出手段7と、走行時においてドライバが前方注視点Pfより所定偏差Dだけ離れた目標到達地点Poを目指す意思に応じて入力される操舵角θstと所定偏差Dとが相関関係にあると見做すことでドライバモデルを設定し、これを前提として得られるドライバ逆モデルにより操舵角θstと車速Vcよりドライバが目指す目標到達地点Poを演算する目標到達地点設定手段A1と、目標到達地点に到達するように車両の舵角、駆動力及び制動力の少なくとも1つのタイヤ力を車両に搭載されたタイヤ力操作手段A7を介して制御する4輪制駆動力、実舵角演算手段A6とを備えた。
(もっと読む)
車線変更支援装置
【課題】
従来の車線変更支援装置では、白線情報を自車と周囲車両の相対情報を算出するために用いているのみであり、道路情報から自車の車線変更支援をして良い場所か否かを判断していない。そのため、車線変更が法律で禁止されている隣車線への車線変更を支援したり、これ以上速度を出すと危険なカーブ曲率の大きい道路で加速制御をしてしまう、いう課題があった。
【解決手段】
車線変更支援装置は、車線変更を支援する機能を許可する第1の制御モードと、車線変更を支援する機能を禁止する第2の制御モードと、自車が走行する道路情報を取得する道路情報取得部と、自車と周囲車両との相対情報を取得する相対情報取得部と、前記道路取得部が取得した道路情報に基づいて制御モードを選択する選択部と、前記相対情報取得部が取得した相対情報及び前記選択部が選択した制御モードに基づいて自車を制御する制御部と、を備える。
(もっと読む)
自動車用車輪浮上がりおよび接地の確認
【課題】車輌の転覆を制御するために、車輌制御システムから利用できるセンサを使って車輪の路面からの浮上がり状態を確実に確認するためのシステムおよび方法を提供すること。
【解決手段】車輌10用のシステム18は、種々のセンサから情報を受け、第1横揺れ状態検出器64A、第2横揺れ状態検出器64B、第3横揺れ状態検出器64C、およびこれらの検出器が発生した横揺れ状態に応じて車輪浮き上がり状態を決定する横揺れ安定性制御コントローラ26を含み、その出力で安全装置44を作動させる。このシステムを設けることによって、車輪浮上がりの効果的決定が行え、適切なブレーキおよび操向回避行動がとれる結果となる。
(もっと読む)
車両の接触回避支援装置
【課題】 自車に接近してくる対向車の進路を精度良く予測する。
【解決手段】 前走車軌跡取得手段が物体検知手段の出力に基づいて前走車Vcの走行軌跡を求めると、対向車進路予測手段が、前走車軌跡取得手段で求めた前走車Vcの走行軌跡を、前走車Vcおよび対向車Vbのすれ違い間隔Lに応じて設定されたオフセット量Oだけ対向車Vb側に移動させて対向車進路を予測するので、簡単な演算処理で対向車進路を精度良く予測することができる。またすれ違い間隔Lが小さいときに、つまり運転者が対向車Vbや周囲の障害物に充分に注意を払って運転を行っているときに接触回避支援手段が作動し難するので、接触回避支援手段が過剰に作動して運転者に違和感を与えるのを防止することができる。
(もっと読む)
車速制御装置
【課題】
路面の凹凸による振動が車両のばね上と共振することを確実に回避して、車両の乗り心地性能の向上が図れる車速制御装置を提供すること。
【解決手段】
車両の車速を制御する車速制御装置1であって、路面の凹凸による振動が車両のばね上と共振することを避けるように車速を増減して車速制御する。これにより、車両のばね上共振が避けられるため、車両の乗り心地性能の向上が図れる。
(もっと読む)
車両の操舵制御装置
【課題】カウンタステア操作が必要な場合にカウンタステア操作を誘導又は補助するための安定化力を操舵操作部材に対して付与する場合において、熟練運転者が覚える「カウンタステア操作中の操舵力が予想に反して軽減されるという違和感」を抑制すること。
【解決手段】車両ヨーイング運動に相当するヨーイング値Ygc(オーバステア状態量Jros、前後力差hFx)と、カウンタステアの程度を表すカウンタステア値Cstr(カウンタステア達成値Cts、カウンタステア不足値Cfs)とに基づいて、カウンタステア操作を誘導又は補助する安定化トルクTstbが演算される。このTstbがステアリングホイールに対してカウンタステア方向に付与される。Tstbは、Ctsが小(Cfsが大)の場合(適切なカウンタステア操作がなされない場合)に大きく、Ctsが大(Cfsが小)の場合(適切なカウンタステア操作がなされた場合)に小さく設定される。
(もっと読む)
車両横方向ダイナミクスの制御方法
本発明は、車両(1)及び特にボディに作用する横方向障害が、障害特定装置(5)によって検知され、横方向障害(Sy)に反作用する反ヨーイングモーメント(G1、G2)が作られる、車両(1)の横方向ダイナミクス制御方法に関し、障害特定装置(5)によって、動的横方向障害を検知し、第1の車両システム(4、3.1、3.2、3.3、3.4)によって、動的横方向障害を少なくとも部分的に補整する第1の反ヨーイングモーメントを作り、動的横方向障害を少なくとも部分的に補整した後に、第1の反ヨーイングモーメント(G1)を低減し、障害特定装置(5)を用いて、静的横方向障害(Sy,stat)があるかどうかを点検し、静的横方向障害が検知された場合、静的横方向障害を少なくとも部分的に補整する第2の車両システム(10)により、第2の反ヨーイングモーメント(G2)を作る、という実行ステップを有する。 (もっと読む)
車両挙動制御装置
【課題】車輪の制駆動力を制御することによってヨーモーメントを発生させて車両の挙動を制御するに際し、車両の減速感または加速感を抑制する。
【解決手段】制動または駆動によるタイヤ前後力を選択した車輪3に個別に発生させることによって自動車1の挙動を制御する車両挙動制御装置10において、ヨー制御車輪選択部は、旋回時にタイヤ前後力を発生させる車輪として、旋回外側前輪および旋回内側後輪を選択し、制御割合設定部30は、車両の走行状態に応じてタイヤ前後力の制動と駆動との制御割合を設定し、調整前後力設定部31は、旋回時にヨー制御車輪選択部29によって選択された車輪のうちタイヤ前後力の絶対値が大きな車輪の左右に位置する車輪に対し、制御割合設定部30が設定した旋回外側前輪のタイヤ前後力と旋回内側後輪のタイヤ前後力との和Aが0となるような調整前後力(aまたは−a)を設定する。
(もっと読む)
車両の運転支援装置
【課題】運転者固有の運転特性に応じた走行制御を行う。
【解決手段】運転支援装置は、走行路内における走行位置を検出する走行位置検出部1bと、基準ラインを走行路に応じて算出する通常時基準ライン算出部1cと、自車両Cが基準ラインに沿って走行するように走行制御を行う操舵制御部1dと、走行制御が行われていないときに、自車両Cの走行路上の走行軌跡を走行路の道路状況と併せて記憶する記憶部1hと、記憶部1hに記憶された走行路上の走行軌跡及び走行路の道路状況に基づいて、所定の道路状況ごとの、基準ラインに対する走行軌跡のオフセット率を抽出するオフセット率抽出部1iと、通常時基準ライン算出部1cによって走行路に応じて算出された基準ラインを、オフセット率抽出部1iによって抽出された道路状況ごとのオフセット率に基づいて、走行路の道路状況に応じてオフセットさせる通常時基準ライン補正部1kとを備えている。
(もっと読む)
車両用運転支援装置
【課題】自車走行路以外の状況についても十分に考慮し、ドライバのフィーリングにあった好適な車速で走行制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット6は、画像認識装置5で認識した車外情報に基づいて、自車走行路に隣接する隣車線の渋滞状況を判定し、隣車線が渋滞していると判定した場合には、ACC制御の目標車速Vtrgtを予め設定された渋滞時用の低車速に変更する。これにより、隣車線渋滞時の自車1の無駄な加速、高い速度での走行がなくなり、ドライバに安心感を持たせることができる。しかも、隣車線渋滞時には低速で走行することにより、隣車線からの急な割り込み車両や万一の歩行者の飛び出し等に対しても十分な対処時間を確保することができる。
(もっと読む)
ハイブリッド車両のモード切り替え制御装置
【課題】モード切り替えの途中でモード切り替え要求が消失した時、元のモードへ戻す逆方向モード切り替えが高応答で完遂されるようになす。
【解決手段】ブロック3300のハイブリッド走行(HEV)モードからブロック3201,3202を経てブロック2200の電気走行(EV)モードへモード切り替えが行われている途中、ブロック3201でHEV→EVモード切り替え要求が消失した場合、ブロック3201からブロック3202を経てブロック2200に至るHEV→EVモード切り替え完遂ループを実行せず、矢A4で示すように締結容量低下中の第1クラッチCL1を逆に完全締結状態に戻すことで、元のHEVモードへ復帰させる。
(もっと読む)
101 - 120 / 352
[ Back to top ]