
Fターム[3D041AA31]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 走行性の向上 (1,351)
Fターム[3D041AA31]の下位に属するFターム
Fターム[3D041AA31]に分類される特許
201 - 220 / 352
車両の制御装置
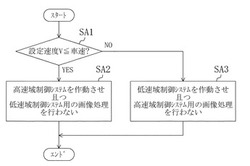
【課題】車両周辺を撮像する撮像手段と、該撮像手段により撮像された画像データに対して所定の画像処理を行う画像処理手段とを備え、該画像処理手段における画像処理に基づいて作動する制御システムの作動制御を行う車両の制御装置において、画像処理手段の処理負担を増加させることなく、複数の制御システムの作動を効率よく制御する。
【解決手段】上記制御システムを低速時に作動する低速度領域性制御システムと高速時に作動する高速度領域制御システムとで構成するとともに、低速時(ステップSA1でNOのとき)には、低速度領域制御システムを作動させるとともに、上記画像処理手段による高速度領域制御システムのための画像処理を停止する一方、高速時(ステップSA1でYESの場合)には、高速度領域制御システムを作動させるとともに、上記画像処理手段による低速度領域制御システムのための画像処理を停止するようにする。
(もっと読む)
車両用運転操作補助装置

【課題】車両制御モードの切換を運転者が容易に覚知することができる車両用運転操作補助装置を提供する。
【解決手段】車両用運転操作補助装置は、先行車両に追従走行する自動制御モード、および、アクセルペダル50の操作に応じて単独走行する手動制御モードのいずれかの車両制御モードによって自車両を走行制御する走行制御手段30、40と、車両制御モードを切り換えるモード切換手段30と、モード切換手段30により車両制御モードが切り換えられると、車両特性を一時的に所定の特性に変更する変更手段40とを備える。
(もっと読む)
車両制御装置
【課題】複数の運転モード切替手段による運転モードの切替を可能としつつ、車両状態に応じて異なる制御部で異なる運転モードの制御を可能とした車両制御装置を提供すること。
【解決手段】車両の運転モードの切り替えを行うスポーツモードスイッチ11、スノーモードスイッチ12、エコモードスイッチ13を備え、これらの運転モード切替手段の切替状態に応じて運転モード管理部2により運転モードを設定し、その運転モードを含む制御指令信号をエンジンECU3、サスペンションECU4に出力する。エンジンECU3、サスペンションECU4は、制御指令信号を受けてアクチュエータに対し駆動制御信号を出力するが、アクチュエータが運転モードに応じて作動できない場合には運転モードと異なる他の運転モードに応じた駆動制御信号を出力する。
(もっと読む)
車両の操作装置
【課題】 運転者によって独立的に操作される操作部の操作状態変化に起因する意図しない車両の挙動変化を抑制する操作装置を提供すること。
【解決手段】 操作意思推定部41は、回転操作部13,14の検出回転角θL,θRの時間変化量に基づき、操作部13,14の操作が意思操作領域または片方操作領域のいずれであるかを判定する。重み係数決定部42は、操作部13,14の操作が意思操作領域であれば重み係数KL,KRを所定の設定値に設定する。また、決定部42は、片方操作領域であれば中立位置まで復帰した側の操作部13(操作部14)の係数KL(係数KR)を小さな値に決定し、他側の操作部14(操作部13)の係数KR(係数KL)を大きな値に決定する。指令値演算部43は、回転角θL,θRおよび係数KL,KRを用いて指令値(要求値)Sを計算する。これにより、運転者の意図しない車速の変化を抑制できる。
(もっと読む)
車両用駆動力制御装置
【課題】実際の自車速と運転者の意思に基づいて設定される目標車速に基づいて自車速を制御する場合に、走行環境や運転者の意思による車両の操作量が様々な状況である場合においても、運転者の意思に合う制御が行われることが可能な車両用駆動力制御装置を提供する。
【解決手段】実際の自車速と、運転者の意思に基づいて設定される目標車速とに基づいて、自車速を制御する車両用駆動力制御装置であって、横加速度に応じて車速制御態様を変更する手段508と、実際の自車速と前記目標車速との相対車速に基づいて、前記横加速度に応じた車速制御態様の変更度合いを変更する手段とを備えている。
(もっと読む)
運転支援装置
【課題】過去の運転者の車両操作と対応付けて記憶された車両状況から今後の運転者が行う車両操作を予測することにより、現在の状況に応じた適切な走行を行わせることを可能とした運転支援装置を提供する。
【解決手段】自車両の前方を走行する前方車両が検出された場合に、学習システムを起動させて自車状況と自車両の周囲状況を前方レーダ装置3や各種センサ等によって検出し(S5、S6)、運転者の車両操作と対応付けて累積的に学習情報DB8に記憶させる(S8)とともに、一方で、その学習結果と現在の車両状況とから運転者が今後に車線変更の運転操作を行うか否かを予測し(S14)、車線変更の運転操作を行うと予測された場合にはレーンキープアシスト制御やクルーズコントロール制御等の車線変更を妨げる制御を抑制する(S16)ように構成する。
(もっと読む)
車両のヨーモーメント制御装置
【課題】 車両の運動状態を制御する主操作部材の操作性とヨーモーメント発生装置の作動を制御する副操作部材の操作性とを両立させる。
【解決手段】 車輪を転舵するステアリングホイール7(主操作部材)のステアリングホイール本体8の一部に回転可能なグリップ9(副操作部材)を設ける。グリップ9を回転させると左右の車輪の制動力に差が発生し、それに伴うヨーモーメントで旋回を補助あるいは抑制することができる。グリップ9をステアリングホイール本体8の一部として構成したので、ステアリングホイール7を操作して車両を旋回させながら、グリップ9を回転させて旋回を補助あるいは抑制することができ、このときステアリングホイール本体8およびグリップ9は共に運転者の同じ手で操作可能であるため、運転者の操作負担が軽減される。
(もっと読む)
自動車において目標の駆動軸パワーを達成するための駆動制御システム
【課題】従来より大きな自由度でエンジンを管理できる自動車制御システムを提供する。
【解決手段】内燃機関(E)は、制御装置(ECU,GSCU,SCU)とセンサ(S1,S2)を備える。制御装置がエンジンを制御して、アクセルペダル(AP)の位置(α)に応じて変化する駆動トルク(CM)を供給する。まず、センサ手段(S1,S2)から、アクセルペダル位置(α)と、エンジン回転速度(ωM)または自動車前進速度(v)とを取得する。次に、測定されたアクセルペダル位置(α)と、計算または取得した自動車の前進速度(v)とに基づき、駆動輪に印加すべきパワー(PT)を決定する。そして、駆動輪に印加すべきパワー(PT)として決定した値と、自動車の前進速度(v)とに基づき、これに対応してエンジン(E)が供給すべき駆動トルク(CMREF)を計算し、この駆動トルク(CMREF)を供給するようエンジン(E)を制御する。
(もっと読む)
車両および車両制御装置
【課題】車速が高い時でもハンドル操作に対する車両のヨー運動の初期応答性を向上させ、ヨー角速度のオーバーシュートを抑え、安定した走行を実現する。
【解決手段】ハンドルの角速度を検出する角速度検出手段8と、左右車輪4RL,4RR間にトルク差を発生させるトルク差発生手段7と、角速度検出手段8からのハンドル角速度をもとにトルク差の目標値を決めてトルク差発生手段7を制御する制御手段11と、を備えた車両制御装置であって、車両の速度を求める車速計算手段10を設け、車速計算手段10で求めた車両速度の高い所定の車速時に現れるヨーピーク周波数の振幅を小さくするピーク抑制部を制御手段11に設ける。また、ピーク抑制部はトルク差のヨーピーク周波数成分の位相をハンドル角と略反対の位相にする機能を備えても良い。
(もっと読む)
車両挙動制御装置
【課題】制駆動力限界付近においてもドライバの意図する車両の加減速性と旋回性を実現する各車輪の制駆動トルクを演算すること。
【解決手段】車両挙動情報、車両外界情報に基づいて車両の目標挙動制御量を演算する手段と、ドライバの加減速要求と旋回要求を検出し、これらをドライバ要求量として演算する手段と、目標挙動制御量とドライバ要求量から、目標加速度と目標ヨーモーメントを演算し、これらを実現するように各車輪の目標制駆動力を演算し、各車輪の制駆動トルクを制御する装置において、目標ヨーモーメントに対する目標加速度の優先度を加速度優先度として、ドライバ要求量と目標挙動制御量に基づいて演算し、各車輪に対し制駆動力上限値と下限値を演算する手段を備えて、少なくとも一輪の目標制駆動力が制駆動力上限値又は下限値を超える場合、制駆動力上限値と下限値、加速度優先度に基づいて各車輪の目標制駆動力を演算すること。
(もっと読む)
ETCレーン走行中にヨー制御される車輌
【課題】ETCレーンは両側縁をかなり高い縁石にて限られたかなり狭い通路であり、車輌が正しく直進走行させられないと、車輪を縁石に接触させる恐れがあるが、ヨーレート偏差に基づいてヨー制御を行う挙動制御装置は、これを発動させるヨーレート偏差の閾値がETCレーン走行時に要するヨー微調整のヨーレートよりも大きいので、ETCレーンでは作動しない。この点を改良してETCレーンでも挙動制御装置を作動させる。
【解決手段】ETCレーンを走行する間、車体ヨー変化を制御するヨー制御手段の発動を抑制する車体ヨー変化の閾値を臨時に低減する。
(もっと読む)
アンダーステア抑制装置
【課題】軽自動車やコンパクトカーが備える電動パワステ制御器とエンジン制御器とトランスミッション制御器のみによって、安価で効果的なアンダーステア抑制装置を得る。
【解決手段】線形路面反力トルク演算器6と、推定路面反力トルク演算器7と、アンダーステア度演算手段8と、実行処理選択器9とを備えている。電動パワステ制御器10の各種センサ1〜5から演算した線形路面反力トルクTalign_linおよび推定路面反力トルクTalign_estに基づき、アンダーステア度US_Indexを検出し、アンダーステアの予兆を検出した場合に、電動パワステ制御器10を用いたハンドル切り戻し処理によりドライバにハンドル切り戻しを促し、さらに、エンジン制御器11やトランスミッション制御器12を用いた減速処理により車両を自動的に減速する。
(もっと読む)
車両運動制御装置
【課題】車輪のグリップ限界における制御特性の変化を穏やかなものとし、ドライバが違和感無く、車両を適切に制御して安定性の向上を図る。
【解決手段】スロットル弁制御装置1では、マップ設定部1aで、予め設定しておいたアクセル開度−スロットル開度のマップにおいて、路面μの値に応じて可変閾値εを定める。可変閾値εは、路面μが高い程、高い値に、路面μが低い程、低い値に設定される。アクセル開度は、可変閾値εより高い領域においては、アクセル開度に対するスロットル開度の変化量が、通常の変化量より低下させられて設定される。すなわち、路面μが高い場合には、通常の特性であっても十分安定性を確保して走行できるが、路面μが低い場合には、アクセル開度に対するスロットル開度の変化量を小さくして、ドライバのアクセル操作に対して十分な安定性を確保できるような特性へと変化させる。
(もっと読む)
鞍乗型車両の姿勢検知装置、エンジン制御装置、及び鞍乗型車両
【課題】2方向の加速度を検知する加速度センサの検知方向を、車両の前後方向に向けることなく、車両のピッチ角を検知できる姿勢検知装置を提供する。
【解決手段】姿勢検知装置は、車両の上下方向D2の重力加速度Gの加速度成分Adownと、左右方向D1の重力加速度Gの加速度成分Alrとを検知するための加速度検知手段と、上下方向D2の加速度成分Adownと左右方向D1の加速度成分Alrとを使用して、車両の前後方向Dに垂直な平面における重力加速度の射影成分Avertと重力加速度Gとの割合を、ピッチ角φに対応する値として算出するピッチ角検知手段とを備える。
(もっと読む)
自動車の制御装置及び制御方法
【課題】
車両の安全性を確保するための制御量と運転者が意図する状態とするための制御量との切り換えが、パワートレインからのショックを低減しつつ実行可能として、安全性と運転性の両立を図る。
【解決手段】
駆動軸トルク,駆動力,加減速度の少なくともいずれかの制御の目標値として変更前の第一の目標値と、運転者が意図する走行モードあるいは前方走行環境に応じて演算された第二の目標値との間に、予め定められた値を越える偏差が生じた場合、駆動軸トルク,駆動力,加減速度の少なくともいずれかの変動を抑制するように制御する。
(もっと読む)
車両の制御装置
【課題】 走行時にモータと駆動輪の間の締結要素を締結する場合であっても、運転者に違和感を与えることなく締結可能な車両の制御装置を提供すること。
【解決手段】 動力源と駆動輪との間に介装された第1締結要素と、要求駆動力に基づいて目標締結トルクを演算し、前記第1締結要素の締結トルクが目標締結トルクとなるように制御する締結トルク制御手段と、前記第1締結要素の前記駆動輪側の回転数よりも前記動力源側の回転数が高くなるように前記動力源の回転数を制御する回転数制御手段と、前記動力源のトルクに基づいて前記第1締結要素の締結トルクを推定する締結トルク推定手段と、を備えた。
(もっと読む)
車両運動の安定化制御装置
【課題】 強いオーバーステア特性により高い旋回性能を得つつ、安定限界速度以上の車速において、車両の旋回特性および直進性の安定化を図ることができる車両運動の安定化制御装置を提供する。
【解決手段】 車速が安定限界速度Vc以上の場合、左右駆動力差に対して、運動特性の不安定性を補償するための安定化フィードバック操作代usを設定する安定化フィードバック操作代演算部105と、安定化フィードバック操作代usの範囲内で、ヨーレートγをフィードバック制御で安定化するための安定化フィードバック操作量uFBを設定するF/B指令部108と、安定化フィードバック操作量uFBの限界量(ulmax,urmax)に対して、安定化フィードバック操作代usを確保した上で、車両を安定に走行させるための安定化フィードフォワード操作量uFFrl,uFFrrを設定するF/F指令部107と、を有する。
(もっと読む)
動力システムのトルク制御装置
【課題】動力システムのトルク制御装置に関し、トルク制御にかかるアクチュエータの新規の追加を容易にする。
【解決手段】動力システムの目標トルクに応じた目標トルク信号を、予め設定された分配優先順位に従って各アクチュエータ2、4、12へ分配する。各アクチュエータ2、4、12の信号の入力部には、分配される信号のうち当該アクチュエータ2、4、12の動作特性に合った信号のみを当該アクチュエータ2、4、12の指令信号として通過させる信号処理フィルタ6、8、14を設ける。
(もっと読む)
車両用操舵装置
【課題】ステアバイワイヤシステムと追突速度低減システムとを搭載した車両の車両用操舵装置において、制動力で車両の旋回姿勢を制御する機能により、車両の旋回安定性のフィーリングを確保することにある。
【解決手段】操舵制御手段は操作量検出手段で検出された操作量と旋回状態検出手段で検出された旋回状態との相関を監視する監視機能を有し、制動制御手段は所定の条件が成立した際に車輪へ制動力を付与する自動制動機能を有し、操舵制御手段は制動制御手段の自動制動機能の作動後に監視機能によって相関の乱れを検出した際に所定の関係とは別な第二の関係によって操舵用アクチュエータを制御する。
(もっと読む)
車両用走行制御装置および車両用走行制御方法
【課題】分岐路の先の目標車速がそれぞれ大きく異なっていても、目標車速が低い道路に対する減速制御を確保しつつ、分岐後に減速制御が必要ない道路を走行するような場合であっても、運転者に違和感を与えるような大きな減速制御を防止する。
【解決手段】自車両前方の道路に対して目標車速を設定し、その目標車速となるように自車速を制御する。自車前方に道路の分岐が検出されたときは、第1の減速度による1次減速制御を行った後、前記分岐先の各道路のうち、予め各道路に設定された目標車速のうち最も低い道路に対して、前記第1の減速度よりも大きな第2の減速度による2次減速制御を行う。
(もっと読む)
201 - 220 / 352
[ Back to top ]