
Fターム[3D046BB18]の内容
ブレーキシステム(制動力調整) (22,399) | 目的、効果 (3,539) | 走行時の速度制御 (711) | 衝突防止 (357)
Fターム[3D046BB18]に分類される特許
21 - 40 / 357
車両の障害物検知装置
【課題】急なカーブで障害物検知手段(レーダ装置)が対向車Qをいきなり検知したときであっても、その対向車Qの進行方向を正確に推定して、自車両Wの対向車Qへの衝突可能性を正確に予知する。
【解決手段】対向車Qについて検出された複数(A点〜E点)の相対位置(対向車Qの自車両Wに対する相対位置)に基づいて、該対向車Qの前面が自車両Wに対して向いている方向を推定し、この推定された対向車前面の向きに基づいて、該対向車の進行方向を推定し、自車両Wの進行路と、上記推定された対向車の進行方向と、該対向車について検出された相対位置及び相対速度ベクトルの大きさとに基づいて、自車両Wの該対向車Qへの衝突の可能性を予知する。
(もっと読む)
車両の制御装置

【課題】車両周辺を撮像する撮像手段と、該撮像手段により撮像された画像データに対して所定の画像処理を行う画像処理手段とを備え、該画像処理手段における画像処理に基づいて作動する制御システムの作動制御を行う車両の制御装置において、画像処理手段の処理負担を増加させることなく、複数の制御システムの作動を効率よく制御する。
【解決手段】上記制御システムを低速時に作動する低速度領域性制御システムと高速時に作動する高速度領域制御システムとで構成するとともに、低速時(ステップSA1でNOのとき)には、低速度領域制御システムを作動させるとともに、上記画像処理手段による高速度領域制御システムのための画像処理を停止する一方、高速時(ステップSA1でYESの場合)には、高速度領域制御システムを作動させるとともに、上記画像処理手段による低速度領域制御システムのための画像処理を停止するようにする。
(もっと読む)
走行支援装置
【課題】車輌外観に関する情報を利用したより安全な走行支援を実現する走行支援装置を提供すること。
【解決手段】走行支援装置10は、車輌Aと車輌Bとの間で互いの車輌を外部から視覚的に識別させるための車輌外観に関する車輌情報を授受する車輌情報授受手段103と車輌情報授受手段103が授受した車輌情報を用いて走行支援を行う走行支援手段104とを備える。また、走行支援装置10は、車輌Aの所定行為に対する受諾を車輌Bに要求する要求信号を発信する要求信号発信手段102を備え、車輌情報授受手段103は、要求信号を受諾した車輌Bが返信する車輌情報を受信し、受諾信号を返信した車輌Bに自車輌Aの車輌情報を送信する。
(もっと読む)
車間距離制御装置
【課題】停止車両以外の静止物体を車間制御のターゲットから極力除外し、また、車間制御のターゲットを先行車両から割込車両へ早期に変更することができる車間制御装置を提供する。
【解決手段】運転者がコントロールSW21から停止車両選定指示や割込車両選定指示に対応するコースト操作を行った場合に、停止車両や割込車両をターゲットの候補として抽出しやすくする。
(もっと読む)
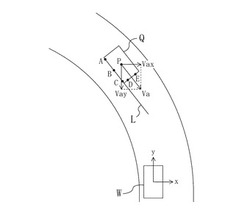
車両の障害物検知装置
【課題】障害物検知手段(レーダ装置)により検知した障害物について該検知から所定時間経過後における自車両Wに対する相対位置を予測する場合に、該相対位置を正確に予測できるようにする。
【解決手段】移動物体(先行車両Q)について該移動物体の検知から所定時間経過後における自車両Wに対する相対位置を予測する際、該移動物体の近傍に位置する静止物体について検出された複数(A点、B点及びC点)の相対位置に基づいて、該移動物体の移動方向を推定し、該推定された移動方向(A点、B点及びC点から求まる円の中心Pに向かう方向と垂直な方向E)と、該移動物体について検出された相対位置及び相対速度ベクトルの大きさとに基づいて、該移動物体について上記所定時間経過後の相対位置を予測する。
(もっと読む)
車両の発進補助装置
【課題】車両の発進時において該車両の進行を予定している方向に障害物があった場合に、該障害物と車両との衝突の回避をアシストすることができる車両の発進補助装置を提供する。
【解決手段】発進補助装置として機能する発進補助用ECUは、車両の前方に障害物Bが存在していることを認識した場合(ステップS18が肯定判定)において、自動変速機のレンジが前進レンジであるとき(ステップS15が肯定判定)には、常用ブレーキを駆動させることにより、各車輪に制動力を個別に付与させる(ステップS19)。一方、発進補助用ECUは、車両の後方に障害物Bが存在していることを認識した場合(ステップS17が肯定判定)において、自動変速機のレンジが後進レンジであるとき(ステップS16が肯定判定)には、常用ブレーキを駆動させることにより、各車輪に制動力を個別に付与させる(ステップS19)。
(もっと読む)
車両の運転支援装置
【課題】前方障害物の状態に応じて適切な回避動作を行い自然で確実な接触回避を行う。
【解決手段】制御ユニット7は、回避制御のONの際、自車両1との接触可能性があると判定した対象立体物に対し、対象立体物が静止状態とみなせる場合、この対象立体物に他の立体物が隣接して存在しない場合には、電動パワーステアリング制御装置12に電動パワーステアリング出力電流Imを出力して自動操舵による回避を行わせる一方、対象立体物に他の立体物が隣接して存在する場合には、自動ブレーキ制御装置13に減速信号を出力して自動ブレーキによる回避を行わせる。また、対象立体物が移動状態とみなせる場合には自動ブレーキ制御装置13に減速信号を出力して自動ブレーキによる回避を行わせる。
(もっと読む)
走行支援装置
【課題】必要な状況にのみ走行支援を行い、運転者が違和感を覚えることなく自車両の衝突を防止することのできる走行支援装置を提供する。
【解決手段】自車両が交差点に向かって非優先道路を走行していると判断されると共に、自車両の斜め前方に存在する他車両が検出されると、自車両と他車両とが、衝突する可能性があるか否かが判定され、その結果に応じて回避支援部が作動される。この時、自車両が交差点に向かって非優先道路を走行していると判断されていると、優先道路を走行している場合に比べて、衝突する可能性があると判定し易くする。従って、自車両が非優先道路を走行している場合には、適切な走行支援を行い、優先道路の場合には走行支援を行いにくくする。
(もっと読む)
車両用運転支援システム
【課題】 同乗者の乗り心地を向上させる。
【解決手段】 車両の加速度が加速度判定値未満になるようにスロットルバルブの開度及び制動装置等を制御する。これにより、車両が発信した際に車両の乗員に対して必要以上の慣性力が作用しないので、同乗者の乗り心地を向上させることができる。
(もっと読む)
車両の障害物検知装置
【課題】障害物検知装置の障害物の誤検知を抑制する。
【解決手段】本発明は、所定の発信範囲に発信した電波の反射波を受信して反射波の強度が所定のしきい値以上であるときに発信範囲内に障害物が存在すると検知するレーダ装置と、レーダ装置からの障害物検知情報に基づいて車両の作動機器を制御する作動機器制御手段とを備えた車両の障害物検知装置において、運転者の運転操作状態を検知する運転操作状態検知手段と、運転操作状態検知手段が検知した運転者の運転操作状態に基づいてレーダ装置の障害物検知能力を変更する検知能力変更手段を有することを特徴とする。
(もっと読む)
運転支援装置および運転支援方法
【課題】前方車の挙動情報から、障害物を避ける自車の回避運転を支援する運転支援装置および運転支援方法を提供する。
【解決手段】運転支援装置10は、フロントカメラ24、通信装置26を介した車車間通信等により前方車の挙動情報を取得し、前方車が進路を変更して障害物を避ける回避運転をしていると判定すると、自車の運転者が自車の進路を変更して障害物を避けることができるかを判定する。運転支援装置10は、自車の運転者が進路を変更して障害物を避けることができる場合には、ディスプレイ28、警告装置30により自車の運転者に回避運転を案内させ、自車の運転者が進路を変更して障害物を避けることができない場合には、自車の車両制御装置40に自車が障害物との衝突を避ける回避運転を支援させる。
(もっと読む)
車両の障害物検知装置
【課題】不必要な障害物検知装置の作動を抑制する。
【解決手段】本発明は、車両前方の障害物を検知するレーダ装置と、レーダ装置からの障害物検知情報に基づいて車両の作動機器を所定の作動条件で制御する作動機器制御手段とを備えた車両の障害物検知装置において、運転者の運転操作状態を検知する運転操作状態検知手段と、運転操作検知状態手段が検知した運転者の運転操作状態に基づいて前記作動機器の作動条件を所定の作動条件から変更する作動条件変更手段とを有することを特徴とする。
(もっと読む)
運転支援装置
【課題】
信号に進入する車両に対する運転支援を行うにあたり、運転者にとって余計な運転支援とはならないようにする運転支援を行う運転支援装置を提供する。
【解決手段】警報判定ECU1は、警報しきい値設定部11、焦度判定部12、および警報判定部13を備える。警報判定設定部11は、各センサから出力された信号に基づいて運転者の信号停止操作を判定し、この信号停止操作に基づいて警報判定しきい値TDsおよび通過判定しきい値TDmを算出する。焦度12は、各センサから出力された信号に基づいて運転者の焦度を算出し、算出された焦度に基づいて信号到達時間補正値TDhを算出する。警報判定部13は、警報判定しきい値TDsおよび通過判定しきい値TDmを信号到達時間補正値TDhによって補正し、信号到達時間TDと比較することにより、警報判定を行う。
(もっと読む)
制動制御装置
【課題】後方衝突時における二次的事故の発生を防止しかつ自車両に加わる衝撃を軽減する制動制御装置を提供する。
【解決手段】車両の車輪に設けられたブレーキ装置10の制動力を制御する制動制御装置を、車両の衝突を検出する衝突検出手段41と、車両の前後方向における加速度を検出する加速度検出手段43とを備え、衝突検出手段41が衝突を検出した後、加速度検出手段43が検出した加速度が所定の閾値を下回った場合にブレーキ装置10に制動力を発生させる構成とする。
(もっと読む)
車両の走行制御装置
操舵制御手段、制駆動力制御手段、接地荷重制御手段を備えた車両に於いて、演算負荷や消費エネルギの増大を抑制しつつ各制御手段の制御量を最適化し、車両の走行運動を最適に制御する。
【解決手段】車両が緊急の走行運動制御を必要とするときには(440、450)、全ての制御手段についての評価関数を演算して車両全体の目標走行運動制御量を全ての制御手段に配分することにより各制御手段の目標制御量を演算し(700)、車両が緊急の走行運動制御を必要としないときには、車両の走行状態に基づいて特定の制御手段の目標制御量を演算し、特定の制御手段の目標制御量に基づいて特定の制御手段の制御による車両の物理量の変化量を演算し、車両全体の目標走行運動制御量及び車両の物理量の変化量に基づいて他の制御手段の目標制御量を演算する(500、600)。
(もっと読む)
車両の進行方向推定装置及び運転支援システム
【課題】車両の速度ベクトルを算出することで、現時点における車両の進行方向を推定することのできる車両の進行方向推定装置、及び、これを用いた運転支援システムを提供する。
【解決手段】演算部110は、前後加速度センサ20及び横加速度センサ30によって検出される加速度を所定の周期でそれぞれサンプリングして前後加速度Ax(n)及び横加速度Ay(n)を取得する。また、演算部110は、記憶部120に記憶保持されている速度ベクトルV(n−1)及びヨーレートセンサ40のセンサ出力値βに基づいて速度ベクトルVpreを算出するとともに、この速度ベクトルVpreの各成分Vx_pre及びVy_preに、前後加速度Ax(n)と所定時間Δとの積及び横加速度Ay(n)と所定時間Δtとの積をそれぞれ加算することで速度ベクトルV(n)を算出する。
(もっと読む)
ゴルフ用カート
【課題】1人乃至4人を1組にして乗用するカートの車輪にかかる荷重を削減して芝に与える損傷を少なくし、フェアウエーの走行を可能にすることである。
【解決手段】通常4輪のカートの車輪数に少なくとも2輪を更に装備しこれを連結するように構成して2車輌編成とする。先頭車輌は2人乗用でシートの位置と駆動源の位置を操舵輪と駆動輪の中央位置に設置させることで荷重を4輪でほぼ均等に支えることになり、車輪1輪当たりの芝に与える荷重が通常の4人乗用カートに比較して少ない。連結を解除した場合には先頭車輌と後続車輌は2人乗用カートとして走行することができる。1輪当たりの荷重を小さくして芝の損傷を少なくしフェアウエーの走行を可能にする。連結器には自在軸継手とスプリングを併用してを用いている。
(もっと読む)
車両用走行支援装置
【課題】車両制動を迅速に行うこと。
【解決手段】車両用走行支援装置10は、運転者の状態を検出する運転者状態検出手段2aと、運転者状態検出手段2aにより検出された運転者の状態に基づいて、運転者の運転に対する集中度を推定する運転集中度推定手段2と、運転集中度推定手段2により推定された運転者の集中度が高い状態よりも、運転者の集中度が低い状態の方が、運転者の制動操作に対する車両の減速度の立ち上がりをより大きくするような制動準備を行う制動準備手段1と、を備えている。
(もっと読む)
乗員検出システム、警報システム、制動システム、車両
【課題】乗員検出システムにおいて、運転者の注意力が低下しているか否かを精度良く検出する。
【解決手段】乗員検出システム100は、3Dカメラ112と、3Dカメラ112によって撮影された三次元画像に基づき運転者の頭部及び手に関する情報を抽出する情報抽出処理部152と、情報抽出処理部152で抽出された情報に基づき運転者の頭部及び手の位置或いは動作が予め規定された規定状態にあるか否かを検出する検出処理部154と、検出処理部154における検出結果に基づき運転者の頭部及び手が規定状態を外れている場合は、当該部位が規定状態を外れている時間を積算する積算処理部156と、積算処理部156によって積算された積算時間に基づいて、当該積算時間が予め設定された設定値を上回る場合、運転者の注意力が低下していると判定し、当該積算時間が設定値以下の場合、運転者の注意力が低下していないと判定する判定処理部158を備える。
(もっと読む)
車両の走行制御装置
【課題】走行中の後方車両による後突を回避することができる車両の走行制御装置を提供する。
【解決手段】本走行制御装置は、自車両の後方から接近する物体を検知する後方物体検知手段と、前記自車両に対する後方物体の衝突を予知する後方衝突予知手段と、前記自車両の加減速度を制御する走行制御手段と、を備え、前記後方物体検知手段からの検知信号に応じて、前記後方衝突予知手段によって後方からの衝突が予知されると、前記走行制御手段によって自車両が加速制御される。
(もっと読む)
21 - 40 / 357
[ Back to top ]