
Fターム[3D114CA07]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | ラインの構成 (829) | 組付、組立て、取外ライン (410) | 艤装ライン (86)
Fターム[3D114CA07]に分類される特許
1 - 20 / 86
テープ貼着工具
【課題】テープを相手部材の側縁部に沿って容易に貼着できるテープ貼着工具の提供を図る。
【解決手段】把手1Aを把持してテープガイド3の位置決め部3aをドアトリム11の側縁部に当接させて、ドアトリム11の所定位置に貼着した不織布テープ12の貼着始端上にローラ2を押し当てて、テープ貼着方向へ転動させる。これにより、不織布テープ12はテープガイド3,4によってテープ幅方向の遊動が規制されてローラ2とドアトリム11面との間に逐次遊動されると共に、ドアトリム11の側縁部に沿って整然と貼着される。
(もっと読む)
車体組立ラインにおけるドアの搬送方法及び車体組立ラインにおけるドアの搬送装置

【課題】低コストで敷設スペースを必要としない車体組立ラインにおけるドアの搬送方法及び車体組立ラインにおけるドアの搬送装置を提供する。
【解決手段】搬送コンベアC/Vの搬送パレット1に車体Wを載置して搬送することにより前記車体Wに部品を組み付ける車体組立ラインLにおけるドア搬送方法であって、前記搬送パレット1の基台2に配設したドア収納部4に、前記車体Wから取り外したドアDを載置して搬送する。
(もっと読む)
インパネモジュールの車両搭載方法
【課題】インパネモジュールを車室前部に組み付ける作業を容易かつ適正に行い得るようにする。
【解決手段】支持メンバ2の左右両端部に設けられた取付ブラケット6よりも車幅方向内方側部の下面側に形成された位置決め孔部に挿入される上向きのピン部8,9と支持メンバ2の受け座23と車両前後方向に面する被クランプ面部25とを有する搭載治具7を支持メンバ2の左右両側方部に装着する装着工程と、上記搭載治具7の被クランプ面部24を移送手段のクランプ部によりクランプするクランプ工程と、該移送手段により上記インパネモジュールを車室前部に移送して上記取付ブラケット6を車体側壁部に仮預けする仮預け工程と、その後に上記搭載治具を支持メンバから取り外すとともに上記取付ブラケットを締結ボルトにより車体側壁部に対して車幅方向に締結する締結工程とを備えた。
(もっと読む)
ドア治具
【課題】スライドドアを車体に対して各種作業に適した状態で位置決め保持可能とし、かつ搬送ライン周辺の作業スペースの縮小を図ることができるドア治具を提供する。
【解決手段】第一アーム8及び第二アーム9の一端は、車体側ベース部2のブラケットに回動軸を異にして回転自在に接続され、第一アーム8及び第二アーム9の他端は、ピボット部材13の一側に回動軸を異にして回転自在に接続され、第三アーム27及び第四アーム28の一端は、ピボット部材13の他側に回動軸を異にして回転自在に接続され、第三アーム27及び第四アーム28の他端は、ヒンジ部材37に回転軸を異にして回転自在に接続され、スライドドア側ベース部3は、ヒンジ部材37に連結軸46を介して回転自在に支持される。
(もっと読む)
車両用ドアフレーム及び車両用ドアフレームの製造方法
【課題】部品点数を増大させることなくドアフレームの曲げ部の設計自由度を大きくすることのできる車両用ドアフレームを提供する。
【解決手段】車両用ドアフレームは、一枚の板材により形成されて中空本体部31A,31B,31Cと同中空本体部31A,31B,31Cから延びるフランジ部32A,32B,32Cとを有する長尺状の部材であって長手方向に対して曲げられた曲げ部30Cを有するフレーム部材30を備える。また、曲げ部30Cには中空本体部31Cとフランジ部32Cとを分断する貫通孔P2が形成され、貫通孔P2は長手方向(矢印D3方向)において曲げ部30Cの中心に近づくほど中空本体部31Cに対してフランジ部32Cが離間する態様にて形成される。
(もっと読む)
加工システム及び加工方法
【課題】ツールの交換の際の通信時間及びロボットの移動時間を短縮すること。
【解決手段】締め付け機25が取り付けられたロボット22は、ツール101,102を取り付ける取り付け部91,92を有している。ロボット23の腕部には、交換用のツール411,412を収納する収納部材401が設けられている。ロボット制御装置は、ロボット22,23の各々の動作を制御することによって、ツール101,102が取り付け部91,92に取り付けられ、ツール411,412が収納部材401に収納されている第1の状態から、ツール101,102が収納部材401に収納され、ツール411,412が取り付け部91,92に取り付けられている第2の状態に遷移させる。
(もっと読む)
インストルメントパネルの取付装置及び取付方法
【課題】車室内にインストルメントパネルを高精度に取り付けることを可能にするインストルメントパネルの取付装置及び取付方法を提供する。
【解決手段】インストルメントパネルの取付装置10は、ボディ14における対称位置で左右一対の車体側測定基準部120の車幅方向位置を計測する一対の第1変位計112と、車室内に搬入される前のインストルメントパネル24における対称位置で左右一対のインパネ側測定基準部122の車幅方向位置を計測する一対の第2変位計116と、第1変位計112及び第2変位計116によって得られる信号から、平面視のボディ中心位置C1及びインパネ中心位置C2を求める演算部134と、演算部134から供給される中心差ΔCに基づいてインストルメントパネル24の車幅方向位置を調整する調整手段85とを有する。
(もっと読む)
ドア搬送設備
【課題】塗装済み車体から取り外したドアを艤装ラインに送り込み、仕上げられたドアを再び元の車体の左右両側に組み付ける際に活用できるドア搬送設備を提供する。
【解決手段】昇降装置7A,7Bは、補助コンベヤ8A,8Bとの間でドアハンガー9R,9Lを移載する上側の第一ドアハンガー移載位置L2と床側のドア積み/下ろし位置L1との間で前記ドアハンガーを昇降させ、補助コンベヤ8A,8Bは、第一ドアハンガー移載位置L2と第二ドアハンガー移載位置L3との間で前記ドアハンガーを搬送し、第一ドアハンガー移載位置L2には、昇降装置7A,7Bと補助コンベヤ8A,8Bとの間で前記ドアハンガーを移載する第一移載手段が併設され、第二ドアハンガー移載位置L3には、補助コンベヤ8A,8Bとドア搬送用走行体40のドアハンガー支持部48a,48bとの間で前記ドアハンガーを移載するドア搬送用走行体昇降装置76が併設される成。
(もっと読む)
ワーク組付装置およびワーク組付方法
【課題】簡素な構成でワークを被組付部に位置決めできるワーク組付装置を提供すること。
【解決手段】サイドエアバッグ取付装置は、ピン挿通孔が形成されたサイドエアバッグを保持して、ピン挿入穴が形成されたサイドエアバッグ組付部に組み付ける。このサイドエアバッグ取付装置は、ハンド本体51およびこのハンド本体51に設けられた複数のワーク保持装置52を有するハンド50と、ハンド50の姿勢および3次元空間における位置を変化させるロボットアーム41と、これらを制御する制御装置と、を備える。ワーク保持装置52は、筒状のシリンダ53と、このシリンダ53に摺動可能に設けられて、先端がピン形状でありかつ基端側に磁力を有するボス部551が形成されたピン部材55と、ハンド本体51に設けられてシリンダ53をフローティング自在に支持するシリンダ支持部54と、を備える。
(もっと読む)
生産ライン
【課題】部品搬送ラインの総長さを短くすることができる生産ラインを提供することを課題とする。
【解決手段】(a)に示す比較例では、ワーク搬送コンベア111に沿って口字形状の部品搬送ライン112が設けられ、この部品搬送ライン112の途中に、部品供給センター113が設けられている。空の部品箱114は、図中、L2で示す距離だけ搬送される。加えて、部品搬送ライン112の総長さは大きい。一方、(b)に示す実施例では、ワーク搬送コンベア12に沿って部品搬送ライン16が設けられているが、この部品搬送ライン16の両端に、部品供給センター23、26が設けられている。結果、空のKITボックス15は、図中、L3で示す距離だけ搬送される。このL3は、(a)に示すL2より格段に小さい。そのため、部品搬送ライン16の総長さも小さくなる。
(もっと読む)
車両の技術的フロント表面を取付ける装置
本発明は、技術的フロント表面と呼ばれる略垂直な機械要素(14)を、上部クロスバー等の車両(20)ボディ(18)の構造的横要素(16)に取付ける装置(10)に関するものであり、機械要素(14)は、クロスバー(16)の上面(27)で支持する少なくとも1つの略水平部(26)又は構造ノズルを含み、前記装置(10)は、車両(20)の車体(18)下でスライドして垂直に取付けられる、機械要素(14)用の少なくとも1つのキャリアプレート(28)を含む。本装置は、プレート(28)が、直立な機械要素(14)を受容するためのフォークと呼ばれる手段(30)を含み、この手段が、少なくとも1つの前傾した垂直位置と垂直位置との間で、上記要素を保持できることを特徴とする。 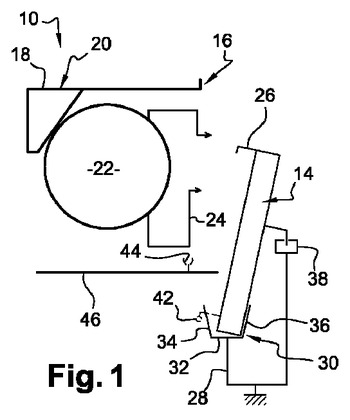 (もっと読む)
(もっと読む)
ワーク艤装方法及びワーク艤装設備
【課題】ドア艤装作業にロボットを導入することができる技術を提供することを課題とする。
【解決手段】ドアの艤装設備10は、メインコンベア12と、このメインコンベア12で搬送される台車13と、メインコンベア12に平行に配置されるサブコンベア15と、メインコンベア12上のドアをサブコンベア15の入口16へ移動する第1の移載装置51と、サブコンベア15に臨んで配置され、サブコンベア15上のドア14に艤装を施すロボット50と、サブコンベア15の出口17から艤装が施されたドア14をメインコンベア12へ戻す第2の移載装置52とからなる。
【効果】通常はロボット50でドアの艤装を実施する。ロボット50に異常が発生したときにはメインコンベア12上で人手で艤装を行う。ロボット50に異常が発生しても、ドアの艤装作業を継続することができる。そのため、安心してロボットを導入することができる。
(もっと読む)
ウィンドウガラスの取付装置及び取付方法
【課題】ウィンドウガラス取付手段をボディに同期して移動させつつ、ウィンドウガラスをボディの窓枠に取り付けるべく、制御することができる構成の自動車のウィンドウガラスの取付装置を提供する。
【解決手段】ボディを搬送する搬送手段3と、ウィンドウガラス16をボディ2に取り付けるアーム12を有するウィンドウガラス取付手段4と、ウィンドウガラス取付手段4の移動手段5と、移動手段5に設けられたセンサ6と、ボディの窓枠2bの段差部Bを、センサによって検出させ、その検出信号に基づいて、移動手段5によってウィンドウガラス取付手段4を搬送手段3と同期するように移動させ、センサ6によって、ウィンドウガラス16の端部を検出させ、ウィンドウガラス16の端部とボディ2の窓枠2bの段差部Bとが平面上で略一致するようにアーム12を制御する制御手段7と、を備えている。
(もっと読む)
自動車用ウエザストリップ組付け治具及び組付け方法
【課題】ウエザストリップを簡単な治具で容易にフランジに取付けられる組付け治具と組付け方法を提供する。
【解決手段】自動車用ウエザストリップの組付け治具において、組付け治具20は、上辺フレーム26、車外側フレーム27と車内側フレーム30から構成されるコ字形のフレームを有する。車外側フレームの上部の内面に上部押えローラー23を設け、車外側フレームの下部には、フランジガイドローラー24とワーク送りローラー25を設ける。車内側フレームの先端部分には、ウエザストリップ10の車内側側壁12の先端に当接して車内側側壁を車内方向に撓ませる開口用ローラー31を設け、開口用ローラー31の後部に車内側側壁をフランジ側に押える側壁押えローラー34を設けたことを特徴とする自動車用ウエザストリップ組付け治具及び組付け方法である。
(もっと読む)
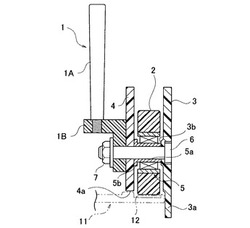
車両用ドアシャーシのテープ付着装置
【課題】車両用ドアシャーシにテープを付着するためのテープ付着装置を提供すること。
【解決手段】ベース体1の上部には、ガイドバー11及び加圧ローラー支持台12によって長方形の加圧ローラー設置キャップ4が一体に形成され、ベース体1及び加圧ローラー設置キャップ4の内側には、外周に加圧ローラー5の設置された加圧ローラー支持軸51を位置させて、加圧ローラー支持軸51の一側に弾性部材14を付勢させて形成する車両用ドアシャーシのテープ付着装置において、長方形の加圧ローラー設置キャップ4の一側の両側部を面取りして切開面41を形成した後、その外周面に軟質のクッション材42を被覆し、加圧ローラー5の後方に位置した加圧ローラー支持台12に静電気防止用のプラスチックパンネル43を付着した。
(もっと読む)
ワーク取付システムおよびワーク取付方法
【課題】汎用性が高くかつ小型化できるワーク取付システムを提供すること。
【解決手段】ワーク取付システム1は、ボディ2のインナパネル2Aにサンルーフ部材3を取り付ける。このワーク取付システム1は、サンルーフ部材3を把持して搬送する搬送ロボット4と、ボルトを締め付けるナットランナおよびCCDカメラを有する取付ロボット5と、搬送ロボット4および取付ロボット5を制御する制御装置6と、を備える。制御装置6は、搬送ロボット4を制御して、サンルーフ部材3を把持してボディ2のインナパネル2Aに搬送し、取付ロボット5を制御して、CCDカメラによりサンルーフ部材3のボルト穴およびインナパネル2Aを撮影して、これらボルト穴およびインナパネル2Aの位置を算出し、これら算出した位置に基づいて取付ロボット5の動作を補正して、ナットランナによりサンルーフ部材3の2箇所をインナパネル2Aに固定する。
(もっと読む)
サスペンションアッセンブリ取り付け装置
【課題】設備にかかるコストを低減できるサスペンションアッセンブリ取り付け装置を提供すること。
【解決手段】マウントシステムは、複数機種に共通する締め付け箇所を締め付ける締付ロボットと、複数機種のそれぞれに固有の締め付け箇所を締め付ける固有箇所締付ユニット70Lと、を備え、締付ロボットは、アームと、このアームの先端に取り付けられたナットランナと、を備える。固有箇所締付ユニット70Lは、ナットランナ71と、ナットランナ71をサスペンションアッセンブリに対して進退させる進退機構72と、進退機構72を進退方向と交差する面に沿って移動可能に支持する移動機構73と、を備え、上述の締付ロボットは、この進退機構72を操作することにより、進退機構72を進退方向と交差する面に沿って移動させて、固有の締め付け箇所に固有箇所締付ユニット70Lのナットランナ71を対向させる。
(もっと読む)
ガラス取り付けシステム
【課題】ガラスの取り付け作業にかかる時間を短縮でき、かつ、設備を小型化してコストを低減できるガラス取り付けシステムを提供すること。
【解決手段】ガラス取り付けシステム1は、フロントガラス11またはリヤガラス12とクォータガラス13とを搬送路21に沿って搬送する搬送装置22と、搬送路21に設けられた一対のガラス取り付けロボット27、28と、を備える。一対の取り付けロボット27、28は、フロントガラス11またはリヤガラス12を取り付ける大型ガラス取り付けロボット28と、クォータガラス13を取り付ける小型ガラス取り付けロボット27と、で構成される。搬送装置22は、フロントガラス11またはリヤガラス12とクォータガラス13とを1組として、この1組のガラスが同時に大型ガラス取り付けロボット28および小型ガラス取り付けロボット27に供給されるように、間欠的に駆動する。
(もっと読む)
作業自動化方法
【課題】人手による作業をロボットによる作業に円滑に移行できる作業自動化方法を提供すること。
【解決手段】作業自動化方法は、ワーク組み立てシステム1に、人手作業エリア30A、30B、ロボット作業エリア40、および緩衝スペース50A、50Bを設け、人手作業エリア30A、30Bでは、ボディ10を連続送りとし、ロボット作業エリア40では、ボディ10をタクト送りとし、人手作業のうち移行対象となるものを抽出する手順と、この移行対象となる人手作業を、人手作業エリア30Bのうち最も緩衝スペース50B側で行う手順と、新たなロボットを緩衝スペース50Bに設置して、ロボット作業エリア40を拡張する手順と、移行対象となる人手作業を新たなロボットの作業に移行する手順と、人手作業エリア30Bのうち最も緩衝スペース50B側のエリアを削減して、人手作業エリア30Bを縮小する手順と、を備える。
(もっと読む)
ウェザストリップのカバーリップ引出し用タブシート
【課題】ウェザストリップのトリム部又はカバーリップに引裂き可能に取付けられ、内装材端部との間に巻き込まれたカバーリップを撥ね上げて内装材端部との間より引き出すためのバリ紐に簡易に取付けることができるタブシートを提供する。
【解決手段】中央両側より入れられたV形状の切欠き28によって狭窄部29が形成されるタブシート27には狭窄部29の両側にバリ紐24のサイズより大で、該バリ紐24が緩く通される断面が円形の孔31と、該孔31通じ、バリ紐24のサイズより小で、バリ紐24が押込まれることによりきつく通される切れ目32とよりなる鍵孔状の紐通し孔33を形成する。タブシート27のバリ紐24への取付けは、バリ紐24をウェザストリップ25より一定区間引裂き、その中央部を切断したのち、切断された端部を紐通し孔33の孔31に通し、ついで該孔31より突出するバリ紐端部を掴んで切れ目32に押込むことにより行う。
(もっと読む)
1 - 20 / 86
[ Back to top ]