
Fターム[3D232CC21]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 安全性、信頼性 (2,661)
Fターム[3D232CC21]の下位に属するFターム
制御系の作動特性、遅れによる変動防止 (92)
誤判定、誤作動防止(フェイルセーフ) (187)
検出精度の向上(センサ自体の精度の向上を含む) (158)
故障対策(フェイルセイフ) (1,724)
ハンチング防止 (33)
オーバーシュート、アンダーシュートの防止 (27)
電圧変動対策 (115)
経年変化(劣化)対策 (30)
急変化防止 (101)
Fターム[3D232CC21]に分類される特許
181 - 194 / 194
パワーステアリング制御装置、および方法

【課題】 パワーステアリング制御装置において、オフセット補正値の温度変化を表す補正テーブルを更新することにより、経年変化等によらず正確なオフセット補正を実現する。
【解決手段】 モータ駆動電流が流れない状態において、オフセット補正部20は電流検出回路120,121からの電流検出値をオフセット補正値として算出する。温度センサ119によって検出された装置温度、およびオフセット補正値を用いて補正テーブルを更新する。これにより、温度変化、経年変化によらず正確なオフセット補正を行うことが可能となる。
(もっと読む)
車両の操舵制御装置

【課題】 操舵補助を行うためのモータへのモータ電流を低減し、過熱保護のためモータ電流が電流制限されることを回避し、また、バッテリの消耗を抑制する。
【解決手段】 車体速度V及びトルク検出信号Tが共に零であり且つイグニッションキーIGNが抜き取られたことを検出したとき(ステップS1、S2)、この時点における操舵角度θに基づいてステアリングシャフト2に形成したロック穴21とロックピン24との相対位置関係を特定し(ステップS3)、操向輪が中立方向に回動したときにロックピン24と先に対向するロック穴21と、ロックピン24との相対位置関係から、ロック21をロックピン24と対向する位置に移動させるために必要な戻し量を算出し(ステップS4)、モータを駆動して戻し量だけステアリングシャフト2を操向輪の中立方向に回動させる(ステップS5)。
(もっと読む)
走行状況の評価方法及び装置
本発明は、走行状態データが求められて評価される走行状況の評価のための方法および装置に関している。本発明によれば車両乗員の潜在的リスクに関する走行状態データが評価されて数値的にマッピングされる。この潜在的総合リスク(全体リスク)は目下の作用力及び/又は推定される力作用とその結果として生じる乗員の動きの算出及び/又は推定によって定められている。  (もっと読む)
(もっと読む)
車両の障害物接触時挙動制御装置
【課題】 障害物への接触回避不可能であり、かつ、助手席の乗員が不在であると判定された場合、運転者の安全性をより高レベルで確保することができる車両の障害物接触時挙動制御装置を提供すること。
【解決手段】 自車と障害物との相対関係により自車が障害物への接触回避可能であるか否かを判定する接触回避判定手段と、自車が障害物への接触回避不可能であると判定された場合、自車の障害物に対する接触時挙動を制御する接触時挙動制御手段と、を備えた車両において、自車の助手席に乗員が存在しているか否かを判定する助手席乗員判定手段を設け、前記接触時挙動制御手段は、自車が障害物への接触回避不可能であり、かつ、助手席の乗員が不在であると判定された場合、助手席側から障害物に接触するように車両にヨーモーメントを発生させる手段とした。
(もっと読む)
レーンキープアシスト装置
【課題】 専用の装置を設置することなく、走行車線からの車両の逸脱を効果的に抑制できるレーンキープアシスト装置を提供する。
【解決手段】 レーンキープアシスト装置本体8は、車両の運転情報や車体側アンテナ32からの白線信号Sdの入力に供される入力インタフェース81と、運転情報に基づいて白線検出指令Ssを生成する白線検出指令生成部82と、白線信号Sdに基づいて車両の走行車線からの逸脱を判定する逸脱判定部83と、逸脱判定部83の判定結果に基づき警告指令を出力する警告指令生成部84と、逸脱判定部83の判定結果に基づき操舵アシスト指令を出力する操舵アシスト指令生成部85と、警告装置7への警告指令やEPSコントローラ6への操舵アシスト指令の出力等に供される出力インタフェース86とを備えている。
(もっと読む)
駐車支援装置
【課題】 駐車枠への目標軌跡に沿って駐車させると共に、運転者のステアリングホイール操作の介入によって容易に駐車位置の微調整を可能とさせる。
【解決手段】 所望の駐車位置に駐車させる運転操作を支援するために、目標駐車位置設定部13で目標駐車位置、自動駐車軌跡算出部15で自動駐車軌跡を算出すると、当該自動駐車軌跡を中心としてステアリング反力領域設定部17でステアリング反力低領域及びステアリング反力高領域を設定する。そして、ステアリング制御部16によって自動操舵させている時に領域判定部19により、自車両位置を現在位置検出部18で検出して目標駐車位置までの距離を算出し、目標駐車位置よりも手前であって距離が大きいほど、自動駐車軌跡からステアリング反力高領域にずれた場合のステアリング反力を高くし、目標駐車位置を通過した場合には、ステアリング反力高領域におけるステアリング反力を低くする。
(もっと読む)
操舵トルクを決定する方法
本発明は、自動車のハンドル用の操舵トルクを決定することを可能にする方法に関する。かじ取り角が、操舵された車輪について、ハンドルを用いて運転者によって予め規定される。車軸に対する力を表す操舵トルクが、ハンドルに作用する。本発明によれば、手動トルク(M_soll)が、少なくとも1つの軸モデルを用いて決定される。次いで、手動トルクは、操舵トルク(M_ist)に重ね合わされる。  (もっと読む)
(もっと読む)
電動パワーステアリング制御装置およびそれにおける駆動電流オフセットの調整方法
【課題】 より高い精度の駆動電流オフセット値を入力し、この高い精度の駆動電流オフセット値を用いて駆動電流のオフセット補正を行なうことのできる電動パワーステアリング制御装置、およびその駆動電流オフセットの調整方法を提案する。
【解決手段】 制御装置CNT内に組み込まれた電動機駆動電流検出手段とは別に、それよりも高い精度の電動機駆動電流測定手段を用意し、この電動機駆動電流測定手段により、高い精度の駆動電流オフセット値を出力する。制御装置内のオフセット補正手段またはオフセット信号発生手段には、駆動電流測定手段からの高い精度の駆動電流オフセット値を受ける入力手段を設ける。
(もっと読む)
車両転覆軽減の方法および装置
車両の転覆事象を検出する方法を提供する。車両の横運動エネルギが、車両縦速度および車両横滑り角に応答して判定される。車両の横加速度が、測定される。タイヤ垂直力が、測定される。転覆潜在力インデックスが、横運動エネルギおよび横加速度に応答して判定される。転覆インデックスが、横加速度の要因およびタイヤ垂直力の要因によって転覆潜在力インデックスに重みを付けることによって判定される。比較を行って、転覆インデックスが所定の閾値を超えるかどうかを判定する。 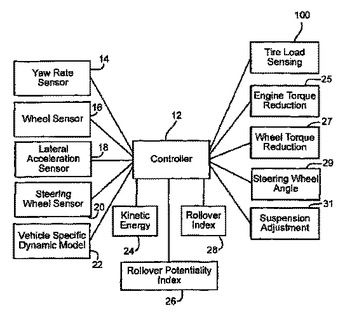 (もっと読む)
(もっと読む)
車両における安全手段を制御するための方法と構成
この発明は、車両における少なくとも二つの動作状態で動作可能な安全手段に関する少なくとも一つの作動変数を求めるための方法であって、安全手段の作動状態は、作動変数と所定の閾値との比較結果に従って変更可能であり、近接センサーを用いて、車両の周囲環境内に有る少なくとも一つの物体の物体データを検出し、この物体データは、物体の位置、物体の速度及び物体の移動方向を含むものである方法に関し、この方法は、物体データから、物体の第一の軌道を求めて、この軌道を、物体との衝突を回避するための運転操作を開始しなければならない最も遅い時点までの第一の時間間隔を算出するために用いることと、第一の時間間隔に従って、作動変数を求めることとを特徴とする。更に、この発明は、安全手段を制御するための方法及びその方法を実施するための構成に関する。  (もっと読む)
(もっと読む)
操舵可能な後輪の操舵角度の制御方法及びシステム並びに対応する車両
本発明は、少なくとも3つの操舵可能な車輪を有する車両(1)のための、操舵可能な後輪(5)の操舵角度の制御方法およびシステム(10)並びにこのようなシステムが搭載された車両に関する。本発明の操舵可能な後輪(5)の操舵角度の制御方法およびシステム(10)においては、前輪(3)の操舵角度と、車両(1)の移動データと、後輪(5)の操舵角度の前の設定点との関数として、後輪(5)の操舵角度の現在の設定点が設定される。
 (もっと読む)
(もっと読む)
操舵可能な後輪のロック角の制御方法及び制御システム並びに同制御システムを有する車両
本発明は、少なくとも3つの操舵可能な車輪を有する車両(1)のための、操舵可能な後輪(5)のロック角の制御方法および制御システム(10)に関する。本発明の制御システム(10)は、前輪(3)のロック角と、車両の移動データと、後輪(5)のロック角の前のセットポイントとの関数として、後輪(5)のロック角の現在のセットポイントを表示するための手段を含み、上記セットポイントを表示するための手段は、漸近擾乱排除モジュールを含む。
 (もっと読む)
(もっと読む)
運転者の行動解釈に基づいて自動車のサブシステムを制御する方法および機構
本発明は、自動車の運転のためのタスクに対する運転者の不注意レベルの検出に依存する、自動車のサブシステムを制御するシステムおよび方法に関する。可変特性は、運転者の不注意と相関し、実質的に実時間に基づいて、測定される。不注意のレベルは、少なくとも部分的に、測定に基づいて評価される。クルーズコントロールや車線維持支援のような自動車のサブシステムの動作は、それに基づいて、前記自動車の動作が運転者の現在の不注意レベルに適切に合致することを保証するように、調整される。前記サブシステムの動作は、運転者の不注意レベルが増加すると本質的に危険性を増す走行条件が確立されることを防ぎまたは回避するように制御される。 (もっと読む)
自動車内における運転者の負荷を調整するための方法及び装置
本発明は、自動車を運転中の運転者の負荷を調整するための方法であって、負荷の値がセンサによって記録された運転者の生理的データから決定される方法、及び前記方法を実行するための装置に関する。本発明によれば、運転者の負荷、すなわち、運転負荷は、最適な運転負荷範囲に維持され、又は前記最適な範囲から外れたときには、そこに戻され、これによって、運転者の最適な動作能レベル又は注意レベルを保証する。すなわち、車両システムは、決定された運転負荷値に依存して制御され、これによって、運転者は、視覚的、聴覚的、又は触知的センサによって、前記運転者の運転負荷値が最適な運転負荷範囲内の値に維持される。 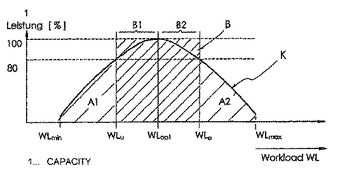 (もっと読む)
(もっと読む)
181 - 194 / 194
[ Back to top ]