
Fターム[3D232CC21]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 安全性、信頼性 (2,661)
Fターム[3D232CC21]の下位に属するFターム
制御系の作動特性、遅れによる変動防止 (92)
誤判定、誤作動防止(フェイルセーフ) (187)
検出精度の向上(センサ自体の精度の向上を含む) (158)
故障対策(フェイルセイフ) (1,724)
ハンチング防止 (33)
オーバーシュート、アンダーシュートの防止 (27)
電圧変動対策 (115)
経年変化(劣化)対策 (30)
急変化防止 (101)
Fターム[3D232CC21]に分類される特許
121 - 140 / 194
作業車
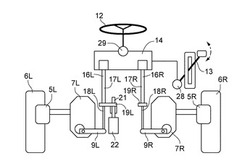
【課題】無段変速装置側の破損等を防止しながら直進補正制御を行う作業車を提供することを課題としている。
【解決手段】走行機体1に設けられた左右の走行装置2L,2Rを駆動する無段変速装置を左右の走行装置2L,2Rに各々対応させて設け、走行速度の設定を行う変速レバー13と両走行装置2L,2Rとの間に、変速レバー13の操作に応じて両無段変速装置を作動させる作動制御手段14を設け、走行機体1を直進走行させる操作状態で、変速レバー13の操作位置が、予め定められた所定位置より高速側に設定されると、走行機体1を直進させるように少なくとも一方の無段変速装置を補正作動させる直進補正手段の作動停止又は直進補正手段による補正範囲の制限を行う補正規制手段を設けた。
(もっと読む)
車両運動制御装置及び制御方法

【課題】車両統合制御において常にμ利用率の上限を最小にする。
【解決手段】各輪タイヤの最大発生力を表す各輪摩擦円の大きさと前回演算された各輪利用率とを乗算して各輪の利用摩擦円の大きさを演算し、目標車体前後力、目標車体横力、及び目標ヨーモーメントを表す目標車体フォース及びモーメントと演算された利用摩擦円の大きさとに基づいて、各輪タイヤ発生力と各輪のμ利用率の上限値に対する割合を表す各輪利用率とを演算し、演算された各輪タイヤ発生力に基づいて、演算された各輪タイヤ発生力が得られるように車両運動を制御する。
(もっと読む)
衝突判定装置
【課題】自車両と他車両との衝突が発生する可能性の有無を精度良く判定する。
【解決手段】時間遅れ補正部23は、第1他車両状態抽出部21により抽出された他車両の走行状態に係る走行状態量(例えば、相対速度等)と、第2他車両状態抽出部22により抽出された自車両の走行状態に係る走行状態量(例えば、相対速度等)とを比較し、この比較結果に基づき、通信装置14を介して他車両から受信した車両状態量の時間遅れ量を算出する。時間遅れ補正部23は、設定した時間遅れ量によって、第2他車両状態抽出部22により抽出された他車両の状態に係る他車両状態量を補正する。危険度判定部24は、補正された他車両状態量に基づき、他車両の進行軌跡および走行挙動を予測し、自車両の走行に対する他車両の危険度を判定する。
(もっと読む)
車両の自動操舵装置
【課題】 自動操舵制御の開始時にステアリングホイールが予期せぬ方向に駆動されてドライバーに違和感を与えるのを防止する。
【解決手段】 図5(B)に示すように、車輪の実転舵角θが所定の範囲(a領域あるいはb領域)内にあるときにステアリングアクチュエータの駆動制御を開始し、かつステアリングアクチュエータの駆動制御の開始時の初期目標転舵角θiniを、駆動制御開始時における目標転舵角θrefの方向と同方向であって前記所定の範囲外のa領域に設定するので、前記駆動制御を開始するときの実転舵角θの状態に関わらずにステアリングホイールが常に同じ方向に回転することになる。これにより、ステアリングホイールが予期する方向と逆方向に回転してドライバーに違和感を与えるのを防止することができ、かつ実転舵角θを初期目標転舵角θiniから目標転舵角θrefへ滑らかに変化させることができる。
(もっと読む)
パワーステアリング装置
【課題】事故発生率の低減を図ることができる安全運転システムを備えたパワーステアリング装置の提供。
【解決手段】操舵部材(図示せず)の操舵速度を検出し、検出した操舵速度、及び与えられた車両の速度に基づき、電動モータの目標回転数を定め、定めた目標回転数で電動モータMを駆動制御し、電動モータMに連動するオイルポンプが発生させた油圧により操舵補助するパワーステアリング装置。車両の速度以外の走行状態又は周囲の状況を示す情報を取得する取得手段25と、取得手段25が取得した情報に基づき、目標回転数を変更する変更手段20とを備える構成である。
(もっと読む)
回避操作算出装置、回避制御装置、各装置を備える車両、回避操作算出方法および回避制御方法
【課題】走行している道路の走行可能な範囲を考慮しつつ障害物の回避を行うことができる運転操作量を算出する回避操作算出装置を提供する。
【解決手段】車両12が走行する道路13およびその境界部29を検出する道路境界検出手段と、道路13上に存在する障害物14を検出する障害物検出手段と、車両12の情報を検出する自車情報検出手段と、道路13上で障害物14を回避するための操作量を算出する回避操作算出手段28とを備える。
(もっと読む)
車両用操舵装置
【課題】 ドライバーに応じて操舵反力を適切に設定できる操舵反力制御機構を実現し、もって操舵負担の軽減または正確な舵角コントロールに寄与する。
【解決手段】 所定期間内あるいはステアリングホイールを強制的に所定量回転させるときに行われたドライバーのステアリング操作の操作量に基づいて、当該ドライバーの機械的インピーダンスを推定するとともに、推定された前記機械的インピーダンスに含まれる、車両から受ける外乱を除去する。その後、外乱が除去された前記機械的インピーダンスに基づいて、前記ステアリングホイールの操舵反力を制御する。
(もっと読む)
ステアリング装置、自動車、及びステアリング制御方法
【課題】坂道に駐停車したときに、車両のずり落ちを最小限に防げる的確な対策を、確実に実施し、性能の一層の向上を図る。
【解決手段】車両が駐停車したときに(ステップS1の判定が“Yes”)、路面勾配の絶対値が所定値以上であり(ステップS2の判定が“Yes”)、且つ車両側方に存在する縁石などの側方物体を検出したら(ステップS3の判定が“Yes”)、操舵輪を転舵しておく(ステップS6)。但し、操舵輪を最大転舵角まで転舵した状態で車両が谷側に動き出すと、操舵輪と車体のどちらが、側方物体と接触するかを予測し、側方物体に接触するのは操舵輪であると予測したときだけ(ステップS4の判定が“Yes”)、操舵輪の転舵を行う。このとき、操舵輪における路面勾配の谷側、つまり操舵輪が路面勾配に応じて転がる側を、車両と近接している路肩に向ける。
(もっと読む)
車両用ステアリングシステム
【課題】実用性の高い独立操作型のステアリングシステムを提供する。
【解決手段】互いに独立して操作可能とされる1対の操作部材を備え、それら1対の操作部材の各々の操作量に基づいて、車輪の目標転舵量のための転舵量成分と、1対の操作部材の各々を基準位置に復帰させる復帰力とが決定されるステアリングシステムであって、転舵量成分の決定において1対の操作部材の各々に対応して設定される操舵ゲインと、復帰力の決定において1対の操作部材の各々に対応して設定される復帰力ゲインとの少なくとも一方が、種々のパラメータに応じて変更可能に構成されたことを特徴とする。本システムによれば、システムの操舵特性を比較的自由に設定することが可能である。例えば、操舵ゲインを操作部材の操作角δに応じて変更するように構成すれば、操作位置に応じて目標転舵量の決定における転舵量成分の寄与度を変更することが可能となる。
(もっと読む)
車両及び車両用操作装置
【課題】4輪独立操舵車両における、回転中心の指定と旋回操作を容易にする。
【解決手段】 回転位置と回転方向の指定、及び平行移動の方向の指定を同一のコントローラで行う。コントローラでは、指定可能な回転位置として、各駆動輪の位置4カ所、隣接する駆動輪間の中心位置4カ所、及び、車両領域の重心位置1カ所、の合計9カ所のうちのいずれか1カ所が指定可能に構成される。コントローラは、操作部が重心位置を除く8方向に傾斜可能に構成され、いずれかの方向に傾斜した状態で操作部を押下することで選択する。中心位置を選択した後に操作部を右、又は左方向に回すことで、回転方向を選択する。車両制御部では、回転中心が選択されると、回転中心位置にない各駆動輪について、各駆動輪を選択された回転中心の方向と略直角方向に操舵し、指定された回転方向に駆動輪を駆動することで、指定された回転中心を中心にした信地回転が行われる。
(もっと読む)
車両及び車両用操作装置
【課題】他車両に取って予想外の動きをする機会をより少なくする。
【解決手段】予め決められた条件を満たす場合に、独立操舵走行が可能な構成とする。予め決められた条件としては、所定車速v5(例えば、10km/h)以下であって、車両の現在位置が許可領域内であることである。ここで、許可領域とは、駐車場内、周囲に駐車スペースがある場所、路上に設けられたパーキングメータのある駐車スペース、又は自宅等の駐車エリアで指定済みの場所である。なお、車速の条件は省略可能であり、駐車場等の所定場所にいる場合に条件を満たすこととしてもよい。
(もっと読む)
操舵角制御装置および操舵制御システム
【課題】 停車時に運転者によりなされた操舵にかかわらず、車両周辺の情報を利用することにより、車両の停車時に安全に停車させ、且つ、次の発進時にスムーズに発進させることができる操舵制御装置を提供する。
【解決手段】 車両の停車時に操舵機構の操舵状態に基づいて、前記操舵機構を駆動する操舵機構駆動手段8を介して所定の操舵角に自動制御する操舵角制御手段3を備えて構成される操舵制御装置1であって、前記操舵角制御手段2は、前記車両の周辺の障害物を検出する障害物検出手段4により検出される障害物に基づいて所定の操舵角に自動制御する。
(もっと読む)
車両用運転補助装置
【課題】障害物の属性、及び距離に基づいて適切な制御を行なうことが可能な車両用運転補助装置を提供すること。
【解決手段】自車両周辺を撮像する撮像装置10、レーダー装置20、又は通信機30のいずれかを少なくとも有し、自車両周辺のリスク要素に関する情報を取得する、リスク要素情報取得手段と、リスク要素情報取得手段により検出された情報に基づいて、各リスク要素が有するリスク程度を計算する、リスク程度計算手段82と、リスク程度計算手段により計算された各リスク要素が有するリスク程度に基づいて、自車両内の機器を制御する、制御手段86と、を備えることを特徴とする。
(もっと読む)
車両挙動制御装置
【課題】 車両のロール振動を精度良く検出しロール振動の発生を抑制できる車両挙動制御装置を提供すること。
【解決手段】車両のロール角、ヨー角、上下変位、横力をパラメータとするロール振動発生判定式を用いて車両におけるロール振動の発生の有無を判断し(S14〜S18)、ロール振動が発生すると判断された場合に車両のサスペンション特性を調整しロール振動を抑制する(S22)。車両のロール方向、ヨー方向、横方向及び上下方向の4自由度運動の連成により生ずる旋回中のロール振動発散現象の発生を精度良く予測することができ、過度に振動抑制制御を行うことなくロール振動の発生を的確に抑制できる。
(もっと読む)
車両制御装置
【課題】衝突を予測して、衝突後の車両の進行方向が危険を回避する方向となるように操舵角を制御する車両制御装置を提供すること。
【解決手段】車両の衝突を予測して車両を制御する車両制御装置10であって、車両の後方からの衝突を予測する、後突予測手段と、車両周辺の状況を検出する周辺状況検出手段と、周辺状況検出手段により検出された車両周辺の状況に基づいて危険を回避する回避方向を決定する回避方向決定手段50と、車両の操舵角を制御する操舵角制御手段60と、を備え、後突予測手段により車両の後方からの衝突が予測された場合には、衝突により車両が前進したときに、回避方向決定手段50により決定された回避方向に車両が進行するよう、衝突前に操舵角制御手段60により操舵角を制御することを特徴とする。
(もっと読む)
車両の操舵制御装置及び車両
【課題】運転者の運転意思の低下が認識されたときに、走行状況に応じた適切なタイミングで、報知や操舵アシスト処理の禁止を行うことができる車両の操舵制御装置及び車両を提供する。
【解決手段】STEP4〜STEP7及びSTEP30で、車両の速度Vsに基づいて算出した第1の判定時間Tvと走行車線の曲率Crに基づいて決定した第2の判定時間Tvとのうち、短い方を運転意思の低下を判断するための判定時間Tjとする判定時間決定手段と、STEP1〜STEP3及びSTEP20で、運転意思低下度合Dwが閾値Dw_th以上である状態の継続時間Tcntを計時する運転意思検出手段と、STEP8とSTEP40及びSTEP41で、該継続時間Tcntが判定時間Tj以上となったときに、警報と「操作アシスト処理」の禁止を行う運転意思低下対処手段53とを備える。
(もっと読む)
可変舵角操舵装置及びその方法、並びにその可変舵角操舵装置を搭載した自動車
【課題】緊急回避操作が行われた際に、回避意図に適合する舵角制御を行うこと。
【解決手段】可変舵角操舵装置は、緊急回避操作検出手段が、ステアリングホイールの操舵状態から運転者の緊急回避操作を検出し、可変舵角制御手段が緊急回避操作に対応する操舵出力に制御するので、緊急回避操作が行われた際に、運転者の回避意図に適合する舵角制御を行うことができる。また、運転者のハンドル操舵に対する操舵輪の制御内容を変更するだけで自動的に運転者の緊急回避操作を補助することになるから、運転者は、緊急回避操作時に、特別な操作や制御介入も必要とせず、しかも当該緊急回避操作時に実施している操舵輪の制御を意識することなく、その回避を達成できる。
(もっと読む)
転舵装置
【課題】 車輪に発生する横力を最大限に利用して前方障害物への接触回避能力を向上させる。
【解決手段】 車輪に発生する横力が最大となる車輪スリップ角を目標スリップ角として記憶しておき、車両前部に設けた前方障害物検知センサにより車両が前方障害物と接触する可能性があると判断したときに、車輪のスリップ角が目標スリップ角になるように転舵角を算出し転舵制御する。
また、横加速度が発生して左右輪の荷重分担が変化した場合には、横力が最大となる車輪スリップ角が変化することから、その接地荷重に応じた目標スリップ角を使って転舵制御することにより、横力を最大限に利用する。
(もっと読む)
車載用モータ制御装置、これを使用した電動パワーステアリング装置及び電動ブレーキ装置
【課題】スイッチング損失を小さくして高出力が得られる車載用モータ制御装置、これを使用したパワーステアリング装置及び電動ブレーキ装置を提供する。
【解決手段】直流電源から出力される電源電圧を昇圧する昇圧手段2と、該昇圧手段2から出力される昇圧電圧に基づいて多相モータをパルス幅変調信号で駆動制御するモータ駆動手段4と、該モータ駆動手段4の還流タイミングを検出し、検出した還流タイミングで前記昇圧手段のスイッチング制御を行う昇圧制御手段5とを備えている。
(もっと読む)
ハンドル駆動装置
【課題】ハンドルによる巻き込みに対して適切に対処することが可能なハンドル駆動装置を提供すること。
【解決手段】ステアリングアングルセンサ30は、ハンドル22の回転速度が小さくなるにつれてパルス幅が広くなるパルス信号を生成してそれをステアバイワイヤ制御装置40に出力する。ステアバイワイヤ制御装置40は、ステアリングアングルセンサ30から入力されるパルス信号のパルス幅を監視するとともに、パルス幅が広くなったことを指標としてハンドル22による巻き込みを検出する。ステアバイワイヤ制御装置40は、ハンドル22による巻き込みを検出したとき、ハンドル22を反転駆動させる。
(もっと読む)
121 - 140 / 194
[ Back to top ]