
Fターム[3D232CC21]の内容
走行状態に応じる操向制御 (73,124) | 制御目的 (7,801) | 安全性、信頼性 (2,661)
Fターム[3D232CC21]の下位に属するFターム
制御系の作動特性、遅れによる変動防止 (92)
誤判定、誤作動防止(フェイルセーフ) (187)
検出精度の向上(センサ自体の精度の向上を含む) (158)
故障対策(フェイルセイフ) (1,724)
ハンチング防止 (33)
オーバーシュート、アンダーシュートの防止 (27)
電圧変動対策 (115)
経年変化(劣化)対策 (30)
急変化防止 (101)
Fターム[3D232CC21]に分類される特許
41 - 60 / 194
車両挙動制御装置
【課題】 制動時における望ましくない車体挙動を抑制するための車両挙動制御装置を提供する。
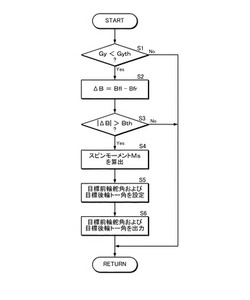
【解決手段】 ステップS4でスピンモーメントMsの算出を終えると、VSA−ECU31は、ステップS5で、式(4),(5)が満たされるように、前輪3fl,3frの目標前輪舵角δftと後輪3rl,3rrの目標後輪トー角Trtとを設定した後、ステップS6でこれらを操舵ECU32に出力する。これにより、μスプリット路51での制動時であっても、自動車1の車体2にはヨーモーメントも横力も作用せず、直進状態を維持したまま減速あるいは停止できるようになる。
fl・Ffb=−(fl・Ffs+fr・Frs)・・・(4)
Ffs=−Frs・・・(5)
(もっと読む)
車両用操舵装置及び車両用操舵方法

【課題】周囲のリスクに対応した操舵反力を運転者が理解し易い車両用操舵装置を提供する。
【解決手段】運転者が受けるステアリングホイールからの操舵反力と車両操作機器の動作状態に基づいて車両操作機器に作用する運転者の操作力以外の外乱を補償しつつ、自車両周囲のリスク度合い及び操舵角に応じた操舵反力を操舵伝達系に付加する。
(もっと読む)
ドライビングシミュレータ、その制御方法およびその制御プログラム
【課題】異常が発生した場合であっても、ドライビングシミュレータ及びテストドライバの安全を確保することが可能となるドライビングシミュレータを提供する。
【解決手段】ドライビングシミュレータに、車輪を操舵するステアリングメカニズムと、前記ステアリングメカニズムの操舵に基づき仮想車両モデルの挙動を算出するとともに、該挙動に基づき操舵反力を表す指令信号を生成するシミュレーション部と、前記指令信号に対応した操舵反力を前記ステアリングメカニズムに印加するアクチュエータと、前記指令信号が所定の条件を満たす場合に、前記操舵反力を減少させる安全装置と、を備えさせた。
(もっと読む)
ブラシレスモータの制御装置および電動ステアリング装置
【課題】ブラシレスモータの回転角を迅速かつ精度良く推定しつつ、ブラシレスモータが脱調して過剰なトルク変動が生じたり、ブラシレスモータが停止してしまうことを防止し、運転者が操舵フィーリングに違和感を感じてしまうことを防止する。
【解決手段】ブラシレスモータの制御装置70は、モータ31の回転時にγ軸に発生するγ軸誘起電圧Eex・sinθeの二乗とδ軸に発生するδ軸誘起電圧Eex・cosθeの二乗との和に基づきモータ31の回転および停止を判定する停止判定器を備える。
(もっと読む)
車両制御装置
【課題】路面の摩擦係数に応じて、タイヤのグリップ力が最大限利用できるスリップ角及びキャンバ角の制御を行うことができ、車両の挙動変化率を小さくする。
【解決手段】車両制御装置1には、車両が走行している路面の路面μを推定するμ推定部11と、この路面μを用いてスリップ角SA及びキャンバ角CAを制御するタイヤ姿勢制御部12とを有するECU10が設けられている。タイヤ姿勢制御部12は、μ推定部11で推定された路面μに基づいて、目標スリップ角SAt及び目標キャンバ角CAtを算出し、この目標スリップ角SAt及び目標キャンバ角CAtに基づいて、目標セルフアライニングトルクSATtを算出する。そして、タイヤ姿勢制御部12は、目標キャンバ角CAtに基づいてキャンバ角CAを制御し、目標セルフアライニングトルクSATtに基づいてスリップ角SA及びキャンバ角CAを制御する。
(もっと読む)
モータ制御装置
【課題】センシング信号を用いて推定されたロータ回転位置の信頼性を検証することによって、モータ制御の信頼性を高めることができるモータ制御装置を提供する。
【解決手段】センシング信号生成部21は、所定のセンシング周波数のセンシング信号を生成する。このセンシング信号がモータ3のステータに注入される。センシング信号に対するモータ3の応答が電流センサ9によって検出される。位置推定部20は、モータ電流波形のピークに基づき、推定回転位置θ^を求める。回転速度演算部25は、推定回転位置θ^を用いてロータの回転速度ω1を演算する。一方、周波数分析部26は、三相検出電流IUVWを周波数分析することによって、ロータの回転速度ω2を求める。信頼性検証部27は、互いに独立に求められた2つの回転速度ω1,ω2の差が速度差閾値を超えているときに、推定回転位置θ^に信頼性がないと判断する。
(もっと読む)
作業車
【課題】車速条件を考慮して複数の操舵モードへの移行の可否を判定することにより安全性を高めようとする。
【解決手段】操舵モード選択手段(92)の操作状態に基づいて、前輪操舵モード(FWS)、後輪操舵モード(RWS)、四輪操舵モード(4WS)を備えた作業車において、作業車の車速検出手段(VS)を設け、前記車速検出手段(VS)が所定速度未満の車速を検出し、副変速機構(7)の油圧クラッチ変速部(11)が低速位置あるときに前記後輪操舵モード(RWS)又は四輪操舵モード(4WS)への設定を許可し、前記後輪操舵モード(RWS)又は四輪操舵モード(4WS)の設定中、車速検出手段(VS)が所定速度以上の車速を検出するとき、前記副変速機構(7)の油圧クラッチ変速部(11)の低速位置から高速位置への変速を牽制する。
(もっと読む)
操舵装置
【課題】良好な操舵フィーリングを確保することができる操舵装置を提供すること。
【解決手段】本発明による操舵装置1は、操舵輪2に入力される操舵角θを伝達する入力軸3と、入力軸3の外周面に設けられた雄ネジ3aと、雄ネジ3aに螺合される雌ネジ8aを備える移動部材8と、移動部材8の軸方向端面に対向して位置する規制部材29と、規制部材の移動部材8の軸方向端面に対向する面に設けられた規制部材側磁石30と、移動部材8の軸方向端面の規制部材側磁石30に対向する位置に設けられた、規制部材側磁石30と極性が異なる移動部材側磁石31とを備えることを特徴とする。
(もっと読む)
ステアリング操作装置
【課題】車体の形状によらず操作性の良いステアリング操作装置を提供する。
【解決手段】ステアリング操作装置1では、シリンダ2,3は、油圧によって駆動され車両のステアリング角を変更する。ステアリング弁42は、パイロット圧に応じてシリンダ2,3に供給される油の流量を調整する。パイロット弁52は、操作入力軸54の回転角とフィードバック入力軸55の回転角との差に応じてステアリング弁42に入力されるパイロット圧を調整する。ジョイスティックレバー5は、操作入力軸54に連結されており、傾倒角に応じて操作入力軸54を回転させる。駆動装置6は、フィードバック入力軸55を回転させる。ステアリング角検出部7は、ステアリング角を検出して検出信号として出力する。制御部8は、検出されたステアリング角に応じてフィードバック入力軸55を回転させるように駆動装置6に指令信号を送る。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】操舵補助指令値を、状況に応じて精度良く効率的に制限できるようにすると共に、トルク変動についても確実に抑制できるようにすることにより、より信頼性の高い電動パワーステアリング装置の制御装置を提供する。
【解決手段】操舵トルク及び車速に基づいてアシストマップを参照して演算された操舵補助指令値により操舵系にアシストトルクを付与するモータを駆動制御する電動パワーステアリング装置において、所定の条件に従って操舵補助指令値を制限する操舵補助指令制限値を算出する操舵補助指令制限値算出部を具備し、操舵補助指令値と操舵補助指令制限値との偏差又は比率に基づいて、操舵補助指令値が操舵補助指令制限値を超えないように制限する。
(もっと読む)
車両用衝突安全制御装置
【課題】衝突安全制御をより適切に行なうことが可能な車両用衝突安全制御装置を提供すること。
【解決手段】車両前方の障害物を検出するための障害物検出手段(10)と、該障害物検出手段の出力に基づき車両前方の障害物との衝突を予測する衝突予測手段(40)と、を備え、該衝突予測手段の予測結果に基づき種々の衝突安全制御を行なう車両用衝突安全制御装置(1)であって、車両のヨー運動を検出するためのヨー運動検出手段(20)を備え、前記衝突予測手段は、第1の予測モード、及び該第1の予測モードに比して車両前方の障害物との衝突可能性を高く予測し易い第2の予測モードで車両前方の障害物との衝突を予測する手段であり、前記第1の予測モードで車両前方の障害物との衝突可能性があると判断している状態において、前記ヨー運動検出手段により所定程度以上のヨー運動が検出されたときに、前記第2の予測モードに移行することを特徴とする。
(もっと読む)
車両監査装置およびそれを用いた車両制御システム
【課題】制御対象に対する機能ドメイン制御手段による挙動制御の正当性を正しく判定し、機能ドメイン制御手段の冗長系の複雑化を防止する車両監査装置およびそれを用いた車両制御システムを提供する。
【解決手段】イントラボックス100は、タイヤ70の挙動を制御するステアリング制御装置30およびブレーキ制御装置40とは独立して設置されている。イントラボックス100の挙動情報取得手段210は、各種センサの検出信号等から車両の実際の挙動情報を取得する。監査手段240は、車両の実挙動情報に基づいて、ステアリング制御装置30およびブレーキ制御装置40のタイヤ70に対する挙動制御の正当性を判定する。ステアリング制御装置30およびブレーキ制御装置40による挙動制御が異常の場合、監査手段240は、車両の挙動異常を解消するように、ステアリング制御装置30およびブレーキ制御装置40に対して挙動制御の指令値を出す。
(もっと読む)
車両制御装置およびそれを用いた車両制御システム
【課題】制御対象に対する機能ドメイン制御手段による挙動制御を車両環境に応じて適宜調整し、機能ドメイン制御手段の構成の変更に適応する作業量を低減する車両制御装置およびそれを用いた車両制御システムを提供する。
【解決手段】車両制御装置は、車両が置かれた車両環境に基づいて車両モードを設定し、車両モード毎に、分配する資源と、資源を分配する機能ドメイン制御手段とを決定する(S300)。車両環境は、走行速度、運転者により設定される運転モードである省エネモードおよびスポーツモード等の車両自体に基づいた車両の走行状態と、車両の周囲の天候、走行道路の種別、走行地域、駐車中、車両移送中、盗難等の車両の周辺状況とを表す。車両制御装置は、S300で設定した車両モードを判定し(S302)、車両モードに応じて適切な量の資源を機能ドメイン制御手段に分配する(S304、S306、S308)。
(もっと読む)
車両の後輪転舵装置
【課題】後輪転舵装置を備えた車両において、走行中にイグニッションスイッチがオフ状態からオン状態へと切り替えられた場合でも、走行安定性や操縦性の低下を抑制する。
【解決手段】車両1の左右後輪5の転舵に供されるアクチュエータ11と、車両の走行状態に応じてアクチュエータの目標作動位置を設定する目標作動位置設定部32と、イグニッションスイッチ13がオン状態の場合、目標作動位置設定部から出力された目標作動位置の情報に基づき、アクチュエータを駆動制御する駆動信号生成部33と、アクチュエータの実作動位置を検出する作動位置センサ16とを備え、目標作動位置設定部が、イグニッションスイッチのオフ状態からオン状態への切替の際に、目標作動位置と実作動位置との間に暫定作動位置を設定し、その暫定作動位置を目標作動位置の情報として駆動信号生成部に出力することで、後輪転舵角の急激な変化を防止する。
(もっと読む)
タイヤ
【課題】転がり抵抗の低減とグリップ性能の向上との両立を図ることができるタイヤを提供すること。
【解決手段】タイヤ100によれば、第1トレッド141のトレッド幅W1内にタイヤ中心線CLが位置する構成であるので、比較的小さな(0°またはその近傍の)キャンバ角がつけられた状態では、転がり抵抗の小さい第1トレッド141を接地させて、省燃費化を図ることができる。また、この場合には、仮想線L1と仮想線L2とが角度θ2をなすと共に、仮想線L1と仮想線L3とが角度θ1をなす構成であるので、第2トレッド142及び中間トレッド143を走行路面から離間させることができる。これに対し、比較的大きなキャンバ角がつけられた状態では、グリップ力の高い第2トレッド142及び中間トレッド143を接地させて、グリップ性能の向上を図ることができる。
(もっと読む)
電動パワーステアリング装置
【課題】3相ブラシレスモータに電力を供給する3相の電路のうちの少なくとも2相の電路にそれぞれリレーの接点が介挿された回路構成を有する電動パワーステアリング装置において、接点の確実な導通チェックを行うことを可能とするとともに、接点表面の異物を除去して良好な導電性を回復する機能を高める。
【解決手段】いずれか1相には電流を流さず、他の2相には互いに絶対値が同じで符号が異なる電流を流すことにより、3相ブラシレスモータの駆動電流波形上の一通電角における状態を連続的に与え、当該2相に介挿された接点に、比較的大きな電流を同時に逆向きに流す。かかる大電流を接点に流すことにより、確実な導通チェックを行うことができるとともに、接点表面の異物を溶融させ、又は、熱的に破壊することができる。
(もっと読む)
電動パワーステアリング装置
【課題】カーナビゲーション装置と連携することにより出力不足や、他の電装品への悪影響の発生を回避する。
【解決手段】モータ4に電力を供給する主電源9と、前記モータ4に電力を供給することが可能な補助電源10と、前記主電源9に基づいて前記補助電源10の充電を行うとともに、前記主電源9のみによって前記モータ4へ電力を供給する第1の出力状態と、前記主電源9及び補助電源10から前記モータ4へ電力を供給する第2の出力状態とを選択的に構成する充放電回路13と、外部にナビ情報を送信可能なカーナビゲーション装置30からの当該ナビ情報を受信するとともに、前記ナビ情報から車両が高速操舵予測エリアに存在するか否かを判断し、車両が高速操舵予測エリアに存在すると判断するときは前記充放電回路13を前記第2の出力状態とし、存在しないと判断するときは前記充放電回路を前記第1の出力状態とする制御回路6とを備えている。
(もっと読む)
電動パワーステアリング装置
【課題】昇圧回路を備えていても、給電をオン/オフするスイッチ手段のオン/オフ時に、そのスイッチ接点が損傷し難く、その寿命が短縮させられ難い電動パワーステアリング装置の提供。
【解決手段】車載バッテリBaの出力電圧を昇圧する昇圧回路8と、昇圧回路8が昇圧した電圧が印加される駆動回路13により駆動される操舵補助用のモータ18と、昇圧回路8及び駆動回路13の間に接続されたスイッチ手段15aとを備え、検出した操舵部材(図示せず)に加わる操舵トルク(10)に基づき、モータ18を駆動制御すると共に、スイッチ手段15aが駆動回路13への給電をオン/オフするように構成してある。
(もっと読む)
車両用制御装置
【課題】車両用制御装置において、先行車が存在するのに、一瞬、自車両が車線を逸脱しそうになるような状況で、先行車が存在しないという誤った判断をすることがなく、先行車への追従性が損なわれることはなくなり、これにより、追従性精度の向上に貢献することにある。
【解決手段】車線逸脱防止制御手段から、自車両の推定走行軌跡と走行レーンとの角度情報を出力し、角度情報が設定値以上ある場合で、且つレーダから出力される結果が、前回の結果が先行する車両有りで、今回の結果が先行する車両無しの場合でも、先行車両検出手段で先行車有りと出力している。
(もっと読む)
電動パワーステアリング装置の検査装置
【課題】電動パワーステアリング装置の異常の検出並びに異常と確定されるまでには至らない不確定異常の発生を検出し、不確定異常の発生頻度から今後の異常を予測することにより、検査後の異常の発生を確実に低減させ、より信頼性の高い検査が可能となる電動パワーステアリング装置の検査装置を提供する。
【解決手段】ステアリング機構に操舵補助力を付与するモータを駆動制御する制御手段と、制御手段の各部の異常の有無を診断する複数の異常診断手段と、異常診断手段に接続される検査装置とを備えた電動パワーステアリング装置の検査装置において、異常の確定には至らない不確定異常を検出してカウントアップする検出カウンタを異常診断手段に備え、検査装置が、検出カウンタの情報に基づいて各部の異常並びに異常診断手段の異常を検出する。
(もっと読む)
41 - 60 / 194
[ Back to top ]