
Fターム[3D244AC26]の内容
定速走行制御 (7,912) | 入力信号 (2,923) | 車両の状態に関するもの (1,907) | 車速 (557)
Fターム[3D244AC26]の下位に属するFターム
微低速 (2)
Fターム[3D244AC26]に分類される特許
81 - 100 / 555
車両速度制限装置
【課題】車両がより安全に曲線路を走行することができる車両速度制限装置を提供する。
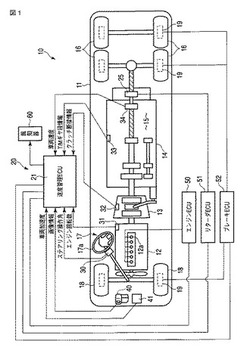
【解決手段】車両速度制限装置20は速度管理ECU21を備えている。速度管理ECU21には、ステアリング操作角を検出するステアリングセンサ30と、車速センサ34からの信号が入力される。速度管理ECU21は、これらの信号に基いて、走行中の曲線路の曲率(道路曲率)を求める。さらにこの道路曲率に応じた目標制限速度を求めるとともに、目標制限速度に応じたエンジン目標トルクを求める。実トルクが目標トルクを越えている場合、エンジンを制御することによって実トルクを目標トルクに近付ける。さらに実速度が目標制限速度を越えている場合には、エンジンブレーキをかける、リターダ装置を作動させる、ブレーキ装置を作動させる、などの制動操作を実行することにより、この車両を目標制限速度まで減速させる。
(もっと読む)
走行制御システム、制御プログラム、記録媒体

【課題】先行車両への追突を回避可能である安全な走行制御と、自車両に急激な速度変化が生じることのない乗り心地の良好な走行制御とを両立して実現できる走行制御システムを提供する。
【解決手段】走行制御システムは、自車両が現時刻の先行車両の位置に到達するまでの到達時間を分割することで複数の予測区間を設定して(ステップS105)、到達時間の経過時点における自車両の目標加速度を各予測区間毎に算出する(ステップS107)。そして、各予測区間における自車両の予測加速度や、連続する2つの予測区間における操作変化量を入力値とする評価関数を作成して(ステップS108)、評価関数の出力値が最小となる入力値を求める一般化予測制御に基づき、各予測区間における自車両の加速度を取得して(ステップS109)、取得値に現時刻以降の自車両の加速度を制御する(ステップS110)。
(もっと読む)
運転支援装置
【課題】渋滞をより緩和することが可能な運転支援装置を提供する。
【解決手段】本発明の一実施形態に係る運転支援装置1は、定常速度で走行するための運転支援装置において、直前車の発進とともに加速制御を行い、直前車を追従する追従制御手段23と、車速を直前車よりも小さくし、直前車との車間距離を次第に拡大する車間拡大制御手段24と、車速を直前車よりも大きくし、直前車との車間距離を次第に縮小する車間縮小制御手段25とを備える。
(もっと読む)
車両クルーズコントロールを制御する方法及びシステム
本発明は、車両の設定目標速度(Vcc設定目標速度)を維持するように設計されたコントロールユニットを含む車両クルーズコントロール制御方法及びシステムであって、前記コントロールユニットは、車両の総重量である第1パラメータ、現在の道路勾配である第2パラメータを登録し、該登録された第1パラメータ及び第2パラメータに基づいて、前記クルーズコントロールにおけるブレーキクルーズコントロールについての設定車両超過速度(Vbcc)を新しい値(Vbcc flex)に調節するようにプログラムされている。これにより前記クルーズコントロール及びブレーキ装置において、遅延による設定車両超過速度(Vbcc)を超える車両速度に起因する車両速度の増加が回避される。 (もっと読む)
車両走行制御装置
【課題】先行車両の状況に応じた適正な追従制御を実行することができる車両走行制御装置を提供することを目的とする。
【解決手段】少なくとも自車両21の走行方向の前方を走行する先行車両22と当該先行車両22の走行方向の前方を走行する先々行車両23とを含む先行車両群25の平均の速度Vavと、自車両21と先行車両22との車間距離Drとに基づいて、自車両21を先行車両22に追従させる追従制御を実行することを特徴とする。したがって、先行車両22の状況に応じた適正な追従制御を実行することができる車両走行制御装置を提供することができる。
(もっと読む)
運転解析システムおよび運転記録装置
【課題】運転者に対する安全運転教育のための運転記録を提供する運転記録装置および当該運転記録に基づいて運転状態の解析を行う運転解析システムを提供する。
【解決手段】ステレオカメラ1で撮影された画像データを記録する画像記録部2と、画像データから3次元画像情報を算出する3次元画像情報算出部3と、3次元画像情報に基づいて、画像中の動体対応画像部分を特定する動体特定部4と、3次元画像情報に基づいて自車両の速度を検出する速度算出部5と、動体との車間距離を検出する車間距離検出部6と、車間距離および速度算出部5で検出された自車両の速度等の運転情報を記録する記録部7を備えている。
(もっと読む)
補助動力装置付き二輪車
【課題】加速度センサを用いることなく適切な駆動力によるクルーズ走行を可能とする補助動力装置付き二輪車を提供する。
【解決手段】制御部46は、検知されたペダル踏力のピーク値に対応する目標車速MTが保持または漸減されるように駆動モータ24を駆動するクルーズ走行を実行すると共に、車速センサ37により検知される現在車速Vと目標車速MTとの対応関係に基づいて路面の勾配状態を判定し、該勾配状態に応じてクルーズ走行中に目標車速MTの更新を行う。目標車速の更新は、クルーズ走行中に、先に設定された目標車速MT1に対して現在車速Vが所定値以上減少すると、現在車速Vを新たな目標車速MT2,3とすることで実行される。一方、クルーズ走行中に、先に設定された目標車速MT3に対して現在車速Vが所定値以上増加すると、現在車速Vより所定割合だけ小さい車速を新たな目標車速MT4,5とする。
(もっと読む)
先行車追従制御方法及び先行車追従制御装置
【課題】個々の運転者のフィーリングに合う先行車追従制御ができ、ヒヤリハットを防止できる先行車追従制御方法及び先行車追従制御装置を提供する。
【解決手段】先行車と自車の車両情報を用いて自車が先行車に追従するための目標加速度を決定する先行車追従制御方法において、自車加速度が先行車加速度に所定の遅れ時間をもって追従できる加速度として演算した加速度要因加速度と、自車速度が先行車速度に所定の遅れ時間をもって追従できる加速度として演算した速度要因加速度と、車間距離を所定の目標車間距離に保てる加速度として演算した車間距離要因加速度とを重み付きで総和して目標加速度とする。
(もっと読む)
車両走行制御方法
【課題】車両の省エネルギー走行のための実走行条件に即した惰性走行減速度の計測方法、および前記計測方法によって計測された惰性走行減速度を基準としての有効な等減速度走行実行可否判定方法あるいは等減速走行実行方法の提案。
【解決手段】
車両が惰性走行の間の一定時間毎あるいは一定距離走行毎に周期的に惰性走行減速度の計測を行い、前記計測によって得られた最新の惰性走行減速度を用いて、現地点・現時点から減速走行終了点までの等減速度走行による到達可否判定および等減速度走行制御、あるいは前方車両への追従走行移行可否判定および追従走行制御、を行う。
【選択図】 図1  (もっと読む)
(もっと読む)
走行支援装置
【課題】本発明は、他車両の走行状態に基づいて自車両の適切な加速度を設定する走行支援装置を提供することを課題とする。
【解決手段】車車間通信で取得した他車両の走行状態に基づいて自車両の目標速度を設定する走行支援装置1であって、車車間通信で走行状態を取得できた他車両の台数の増加に応じて大きな加速度を設定する加速度設定手段51と、加速度設定手段51で設定した加速度に基づいて目標速度を設定する目標速度設定手段51を備えることを特徴とする。
(もっと読む)
車両走行制御方法
【課題】
「交差点無停止走行制御システム」における地点P通過前後の車両走行速度差に起因する走行安全・渋滞問題の解決、及び地点P−交差点A間走行時の車両運動エネルギーの効率的利用方法、回生方法の提案。
【解決手段】
車両の地点P通過実車両走行速度 vs 、地点P−交差点A間車両走行距離D、交差点A信号状態情報、地点P通過時刻 tp 、から交差点A到着予定時刻 ta を算出し、地点P−交差点A間を等加速度走行して前記交差点A到着予定時刻 ta に交差点Aに到着するための加速度αを算出して加速度αでの定加速度走行で、但しα<0(減速度走行)の場合は惰性走行を行い惰性走行に余る運動エネルギー分は回生ブレーキの調整による減速度αでの定減速度走行で、交差点Aに向けて走行し交差点Aを青信号・無停止で通過する。
(もっと読む)
前後加速度制御装置
【課題】推定勾配トルクの算出精度が低下しても、フィードフォワード制御の精度の低下を抑制できるようにする。
【解決手段】推定勾配信頼度を演算すると共に、この推定勾配信頼度に応じてフィードバックトルクを補正する。推定勾配信頼度が低ければフィードバック制御器3fのゲインが高くなるようにすることができ、推定勾配信頼度に応じた補正後フィードバックトルクを演算することができる。したがって、推定勾配トルクの信頼度が低下し、フィードフォワードトルクの精度が低下しても、推定勾配信頼度に応じてフィードバックトルクを補正することにより、フィードフォワードトルクの精度低下を補完することが可能となる。よって、推定勾配トルクの算出精度が低下しても、総合的に、フィードフォワード制御の精度の低下を抑制できる。
(もっと読む)
加速度制御装置
【課題】アダプティブクルーズ制御装置に用いられる加速度制御装置において、過渡状態における自車両の乗り心地を向上させること。
【解決手段】FBトルクゲイン補正部31は、自車両の走行状態が、走行中状態から停止直前状態、もしくは停止中状態から発進直後状態へと切り替わると、FBトルクゲインを第2設定値に変更する。これと共に、その停止直前状態、もしくは発進直後状態である間、FBトルクゲインを第2設定値に維持する。この第2設定値は、第1設定値よりも小さな値であるため、FBトルクゲインが第1設定値から第2設定値へと切り替えられると、FBトルク制御部30によって実行されるフィードバック制御についての応答遅れが大きくなる。これにより、過渡状態である場合のFB制御量は、時間の進行に対して緩やかに変更され、FB制御によって発生される制動トルクや駆動トルクが大きく変化することを防止できる。
(もっと読む)
走行支援装置
【課題】運転者の操作によって推奨速度への速度調整を容易に実施できる走行支援装置を提供することを課題とする。
【解決手段】運転者の操作に応じて自車両の速度を調整可能な自車速調整手段を備える車両に搭載される走行支援装置1であって、自車両の推奨速度を取得する推奨速度取得手段51と、自車両の速度を検出する自車速検出手段12,22と、推奨速度と自車両の速度との偏差に応じて自車速調整手段の操作特性を変更する操作特性変更手段51とを備えることを特徴とし、操作特性変更手段51は、推奨速度と自車両の速度との偏差が大きいほど、自車両の速度が推奨速度に一致する方向に速度変化し易くなるように自車速調整手段の操作特性を変更すると好適である。
(もっと読む)
走行支援装置
【課題】本発明は、無駄な加減速を抑制する目標速度を設定することができる走行支援装置を提供することを課題とする。
【解決手段】自車両の目標速度を設定する走行支援装置1であって、自車両周辺の他車両の速度を取得する他車両速度取得手段11,21と、他車両速度取得手段11,21で取得した他車両の速度に基づいて目標速度を算出する目標速度算出手段51を備え、目標速度算出手段51は、他車両速度取得手段11,21で自車両前方の複数の他車両の速度を取得できた場合、当該複数の他車両の中で速度の低い他車両ほど目標速度算出に寄与する重みを大きくすることを特徴とする。
(もっと読む)
先行車追従制御装置および先行車追従制御方法
【課題】 ドライバのブレーキ操作による目標車間距離の変更に伴う車両挙動変化を抑制でき、ドライバに与える違和感を軽減できる先行車追従制御装置および先行車追従制御方法を提供する。
【解決手段】 先行車追従制御装置は、ドライバのブレーキ操作量を検出するブレーキ操作量検出センサ4と、追従制御中に所定量以下のブレーキ操作量が検出された場合、エンジンブレーキによる減速度以下の減速度を発生させる追従制御装置5とを備える。
(もっと読む)
車両の制御装置
【課題】走行路面の傾斜に起因して生じる車両の走行速度の変動を打ち消す制振制御が実行される車両において、排気が還流されることにより内燃機関の燃焼状態が不安定になることを抑制することのできる車両の制御装置を提供する。
【解決手段】
排気還流装置44と車両の走行速度SPDを検出する走行速度センサ46とが備えられた車両において、走行路面の傾斜に起因して生じる車両の走行速度SPDの変動を打ち消すように走行速度センサ46の検出結果に基づいてスロットルバルブ34の開度であるスロットル開度θを制御する制振制御が実行されるときには、排気還流弁43を全閉状態とする。
(もっと読む)
車両走行速度制御方法
【課題】
「交差点無停止走行制御システム」における地点P通過前後の車両走行速度差に起因する走行安全対策およびエネルギー消費量・排出ガス量削減効果の一層の向上。
【解決手段】
車両は地点P通過時に、地点Pにおいて、地点P通過時刻、地点Pより交差点Aまでの
走行距離D、地点P−交差点間許容最高速度Vmax、地点P通過時刻、および交差点Aを
青信号・無停止で通過するための交差点Aへの到達設定時刻ta 、の各情報を得るとともに、
地点P通過後の経過時間Δt 、走行距離ΔDの計数を開始し、
その後地点P通過後一定時間Tc経過毎に推奨走行速度voptn(但し、n:0、1、2、
3、・・・、vopt0:地点P通過時の推奨走行速度)を算出して、前記voptn がその時点、の自車速vsnに対して、vsn >voptn であれば惰性走行、またvsn ≦voptn であればvoptn による推奨走行速度走行、で交差点に向けて走行し、交差点Aを青信号・無停止で通過する。
(もっと読む)
車間距離制御システムを制御するための方法および関連の制御システム
本発明は、自動車用の車間距離制御システムの制御に関し、このシステムでは、制御システムのコンピュータが、CANバスを介して、設定点速度値と、インストルメントパネルコンピュータからの速度単位に関係する情報とを受信する。本発明によれば、車間距離制御システムの始動の瞬間に受信される速度単位に関係する情報がメモリに記憶され(S3)、車間距離制御システムが作動されている期間を通じて、メモリに記憶されている情報と比較することによって、受信される速度単位に関係する情報の変更が監視される(S4〜S6)。必要であれば、速度単位の異常に関係する情報項目が生成される(S7)。  (もっと読む)
(もっと読む)
運転支援装置
【課題】ドライバに与える違和感を軽減することができる運転支援装置を提供する。
【解決手段】 運転支援装置1のECU7は、自車両の現在位置と地図データベース13の情報とに基づいて、目標車速設定地点での自車両の目標車速等を演算するパラメータ演算部8と、車速センサ5により検出された車速及び目標車速等に基づいて、自車両の目標減速度を演算すると共に、その目標減速度から減速アシスト制御量の変更回数を決定する目標減速度演算部10と、目標減速度演算部10により求められた目標減速度及び車速センサ5により検出された車速に基づいて、シフト段数及びブレーキ制御量を演算する制駆動配分演算部11と、シフト段数及びブレーキ制御量に応じてシフト及びブレーキを制御する車両制御部12とを有している。目標減速度演算部10は、目標減速度が高いほど減速アシスト制御量の変更回数を少なくする。
(もっと読む)
81 - 100 / 555
[ Back to top ]