
Fターム[3D246BA02]の内容
ブレーキシステム(制動力調整) (55,256) | ブレーキ型式 (2,987) | 液圧式ブレーキ (2,083)
Fターム[3D246BA02]に分類される特許
221 - 240 / 2,083
車両速度推定装置及びトラクションコントロール装置
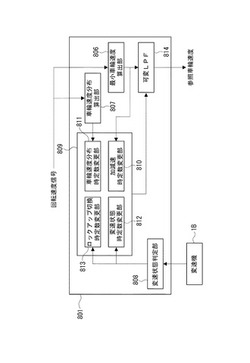
【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う可変フィルタ処理部814、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809、建設車両の変速機の状態を判定する変速状態判定部808を備え、時定数変更部809は、ロックアップの解除指令が出力されてから一定時間経過していない状態にあると判定されたら、可変フィルタ処理部814の時定数を変更するロックアップ切換時定数変更部813を備える。
(もっと読む)
車両用制動力発生装置

【課題】本発明は、簡便な手段で従来の車両用制動力発生装置よりもその形成材料や構成部品の選択の幅が広く、製造コストを低減することができる車両用制動力発生装置を提供することを課題とする。
【解決手段】本発明は、運転者の操作に応じて作動される2つのピストン(第1及び第2ピストン40b、40a)によって液圧を発生させるマスタシリンダ34(液圧発生手段)と、前記液圧発生手段と連通して反力を付与するストロークシミュレータ64(反力付与手段)と、を備える車両用制動力発生装置において、前記2つのピストンのうちの最大の液圧発生値が小さいほうを第1ピストン40bとし、最大の液圧発生値が大きいほうを第2ピストン40aとすると共に、この第1ピストン40bの前方に位置する第1圧縮室56b(液圧室)に前記反力付与手段を連通させたことを特徴とする。
(もっと読む)
制動力制御装置
【課題】マスタシリンダ圧センサを必要としない制動力制御装置を提供する。
【解決手段】マスタカット弁41は、磁性体(プランジャ)101と、コイル102と、スプリング103と、を備える。磁性体101は、第1液圧配管38と連結通路43との液圧差に応じた差圧作用力が開弁する方向に作用される。コイル102は、磁性体101が動くことにより、誘導起電力が発生する。誘導起電力は液圧が変化した際、特に運転者がブレーキペダル31を操作した際、コイル102に電磁誘導により電流が流れるようになっている。ブレーキペダル31を操作したことにより発生した電流をブレーキ液圧に換算して制動装置に導入する。これより、ブレーキペダル31によるブレーキ液圧を制動力制御装置に導入することができる。
(もっと読む)
車両用液圧発生装置
【課題】本発明は、セット荷重のバラツキを低減することができる反力付与手段を有する車両用液圧発生装置を提供することを課題とする。
【解決手段】本発明は、運転者の操作に応じて液圧を発生させる液圧発生手段と、前記液圧発生手段と連通して反力を付与する反力付与手段(ストロークシミュレータ64)と、を備える車両用液圧発生装置において、前記反力付与手段は、前記液圧発生手段からの吐出液圧に応じて作動するシミュレータピストン68(ピストン部材)と、前記ピストン部材に当接して反力を付与する第2リターンスプリング66b(ばね部材)と、を有し、前記ばね部材は、不等ピッチであることを特徴とする。
(もっと読む)
車両の制動制御装置
【課題】要求制動トルクをMGトルクおよびECBトルクの両方で分担するとともに、車両の停止直前にMGトルクをECBトルクに振り替える場合に、MGトルクによる制動をできるだけ低車速まで実施できるようにする。
【解決手段】要求制動トルクがモータジェネレータMGのMGトルクと油圧ブレーキ62によるECBトルクとの両方で分担されるが、車両の停止直前にMGトルクをECBトルクに振り替える際には、ECBトルクを漸増させるとともに、そのECBトルクの増加に対応してロックアップクラッチ30のL/Uクラッチトルクを漸減し、且つ、MGトルクをL/Uクラッチトルク以上に保持しながら漸減する。MGトルクの振り替えと並行してL/Uクラッチトルクが漸減されるため、MGトルクの振替制御の開始時間をそれだけ遅く(低車速)することが可能で、MGトルクの回生制御を低車速まで実施できるようになり、エネルギー回収効率が向上する。
(もっと読む)
車両保持制御装置及び車両保持制御方法
【課題】モータの電力消費量を最小限に抑えることができる車両保持制御装置及び車両保持制御方法の提供。
【解決手段】車両の登坂状態が検出され、かつブレーキペダル17のオフ状態を検出した際に、ブレーキ油圧を保持した後に、徐々に解放する油圧ヒルホールド手段と、走行駆動力を供給可能なフロントモータ4、リヤモータ6と、各モータの駆動力を制御するモータECU11,12とを備えた車両保持制御装置であって、登坂状態の車両1のずり下がりを防止するのに必要な必要車両保持力を路面勾配と車両重量に基づいて導出するエンジンECU13を備え、モータECU11,12は、油圧ヒルホールド手段により徐々に油圧が解放されて減少する車両保持力が、エンジンECU13により導出された必要車両保持力以下になるときに、不足した車両保持力をフロントモータ4やリヤモータ6のトルクで補う。
(もっと読む)
ブレーキ装置
【課題】回生協調制御中のドライバへの違和感を抑制するブレーキ装置を提供する。
【解決手段】本ブレーキ装置は、回生液圧制御手段により、回生制動力による制動中、所定の車両速度領域における車両速度の低下に伴う回生制動力の変化量を制限し、回生制動力の低下にあわせて電動倍力装置によるブレーキ液圧を増大させるので、回生協調制御中の踏力変動と減速度変動とを同時に抑制することができ、ドライバへの違和感を抑制することができる。
(もっと読む)
ブレーキ装置
【課題】 装置全体の小型化を図ることが可能なフィルタ部材を備えたブレーキ装置を提供すること。
【解決手段】 内部に油路が形成されたハウジングと、前記油路に配置された弁体と、前記弁体が当接するシート部を備えたシート部材と、前記シート部材に固定され本体部とメッシュ部を備えた円筒状のフィルタ部材と、前記フィルタ部材の本体部は両端に形成された基部と、前記基部間を接続し前記メッシュ部の開口縁のうち軸方向に沿った開口縁を形成する柱部と、前記柱部の変形を抑制する変形抑制手段と、を備えた。
(もっと読む)
車両制御装置
【課題】より多い頻度でホイールベースの値を取得して、より的確な車両制御が行えるようにする。
【解決手段】車両安定化制御において車両諸元としてホイールベースLを使用する場合に、ホイールベースLが変更されている場合にも対応できるようにホイールベースLの値を推定演算する。そして、少なくとも車両旋回中の車速もしくは車輪速度と、操舵角StrあるいはヨーレートYrのいずれかに基づいてホイールベースLの推定演算を行うようにすることで、より多い頻度でホイールベースLの値を取得する。また、このように推定演算したホイールベースLに基づいて、車両安定化制御を行う。これにより、ホイールベースLが変更されたとしても、的確なホイールベースLに基づいて的確な車両安定化制御を行うことが可能となる。
(もっと読む)
車両の制御装置
【課題】リチウムイオン二次電池を搭載した車両において、Li析出を抑制するための制御を実行した上で、回生発電による回収エネルギを確保しつつ車両制動力の瞬間的な変動によって車両運転性が低下しないようにする。
【解決手段】HV−ECU302は、リチウムイオン二次電池であるバッテリ18におけるLi析出を抑制するために、バッテリ18の充放電履歴に基づいて充電電力上限値を調整する。さらに、HV−ECU302は、調整された充電電力上限値の範囲内でブレーキペダル操作に対応した要求制動力に対する、制動装置10による液圧制動力と、第2MG60による回生制動力との分担を決定するブレーキ協調制御を実行する。Li析出を抑制するために充電電力上限値を制限する際における充電電力上限値の制限度合は、制動装置10に液圧を供給するためのブレーキ液圧回路80での液圧応答レートの検出値に応じて可変に設定される。
(もっと読む)
アクセルペダル誤操作対応装置およびアクセルペダル誤操作対応装置用のプログラム
【課題】アクセルペダル誤操作を検出して車輪にブレーキトルクを発生させる技術において、ドライバがステアリングを適切に操作できない場合でも、車両が危険領域に進入してしまう可能性を従来よりも低減する。
【解決手段】アクセルペダルの誤操作を検出したとき、現在のタイヤ舵角で左側制動輪および右側制動輪にブレーキトルクを発生させたときに車両が安全領域から逸脱すると判定した場合には、車両の右側制動輪のみまたは左側制動輪のみにブレーキトルクを発生させる。これにより車両は、左右の両制動輪にブレーキトルクを発生したときの軌跡よりも、右側または左側にカーブする。
(もっと読む)
車両の制御装置
【課題】回生不能の場合においても、実液圧と目標液圧制動力とのずれを、補償するのに好適な車両の制御装置を提供する。
【解決手段】液圧制動装置により発生させる目標液圧制動力を算出する目標液圧制動力算出手段と、液圧制動装置の実液圧を検出する実液圧検出装置と、実液圧から実液圧制動力を算出する実液圧制動力算出手段と、液圧制動装置を制御して前記目標液圧制動力よりも大きな制動力を発生させた場合の実液圧制動力と目標液圧制動力とのずれを、第1モータを用いて補償する補償装置20とを備える。
(もっと読む)
車両用ブレーキ装置
【課題】 マスタシリンダおよびマスタカットバルブ間の液路のリークを速やかに判定する。
【解決手段】 スレーブシリンダ42が運転者によるブレーキペダル12の実ストロークに応じたブレーキ液圧を発生すると、そのブレーキ液圧でホイールシリンダ26,27,30,31が作動する。リーク判定手段は、ブレーキペダルストロークセンサSdで検出したブレーキペダル12の実ストロークと、液圧センサSaで検出したマスタシリンダ11が発生する実ブレーキ液圧とを、ブレーキペダル12のストロークと、マスタシリンダ12が発生するブレーキ液圧との関係を示すマップに適用することで、マスタシリンダ11およびマスタカットバルブ32,33間の液路のリークを判定するので、液路のリークを速やかに判定することができる。
(もっと読む)
気圧式倍力装置
【課題】気圧式倍力装置において、回生協調時にブレーキペダルの反力の変動を軽減して操作フィーリングを改善する。
【解決手段】ブレーキペダルで入力ロッド133を操作し、制御バルブ132で変圧室108に大気を導入し、パワーピストン106の推力によりマスタシリンダ110でブレーキ液圧を発生させる。液圧の反力の一部をリアクション部材155を介して入力ロッド133に伝達する。入力ロッド133が非作動状態から所定位置に前進するまで、制御バルブ132により変圧室108に大気を導入せず、リアクション部材155の反力を入力ロッド133に伝達せず、マスタシリンダ110で液圧を発生しない。このとき、液圧制御装置でブレーキ液圧を発生して回生協調制御を行ない、戻しバネ140及び反力調整バネ158によって入力ロッド133に反力を付与する。液圧制御装置の作動によるマスタシリンダ110の液圧の変動が入力ロッド133に伝達されない。
(もっと読む)
車両用制動力制御装置
【課題】簡易な構成でブレーキアシスト制御を実現させること。
【解決手段】運転者のブレーキ操作による制動力の不足分を補うブレーキアシスト制御の実行が可能な制動システムと、運転者のブレーキ操作に伴い作動してオン信号を出力するブレーキスイッチ12と、運転者のブレーキペダル10に対するペダル踏力が所定値を超えたときにオン信号を出力する踏力スイッチ11と、を備え、ブレーキスイッチ12のオン信号が検出されてから踏力スイッチ11のオン信号が検出されるまでの時間に基づいて前記ブレーキアシスト制御の実行要否判定を行うこと。
(もっと読む)
操舵力制御装置
【課題】最小限の構成による簡素な構成で、車両姿勢が不安定となったときに適切に操舵補助力を付加し、ステアリング操作による車両の姿勢の安定化を促進させることのできる操舵力制御装置を提供すること。
【解決手段】電動パワーステアリング(10)を備えた車両(1)において、前輪(2L,2R)の左右車輪速差、または後輪(4L,4R)の左右車輪速差が所定車輪速差αより大、または当該左右車輪速差の変化率が所定変化率βより大であるような場合に(S3)、所定時間の間(S9)低車輪速側に操舵補助力を付加する。
(もっと読む)
車両用ブレーキ装置
【課題】 マスタシリンダおよびストロークシミュレータを接続する液路の閉塞を確実に判定する。
【解決手段】 スレーブシリンダ42が運転者によるブレーキペダル12の実操作量に応じたブレーキ液圧を発生すると、そのブレーキ液圧でホイールシリンダ26,27,30,31が作動する。このとき、マスタシリンダ11が送出するブレーキ液をストロークシミュレータ35で受容することで、ブレーキペダル12に擬似的な反力が付与される。閉塞判定手段は、ブレーキペダルストロークセンサSdで検出したブレーキペダルのストロークと、液圧センサSaで検出したマスタシリンダ11が発生する実ブレーキ液圧とに基づいてマスタシリンダ11およびストロークシミュレータ35間の液路の閉塞を判定するので、液路の閉塞を確実に判定することができる。
(もっと読む)
アンチスキッド制御装置
【課題】積載重量の変化に対応したより最適なABS制御を行えるようにする。
【解決手段】前高μ輪に対して実行される制御中ヨーコン制御において、推定積載重量に応じて圧力閾値Pholdを可変とし、推定積載重量に応じて設定される圧力閾値Pholdに基づいて保持制御と緩増圧制御の選択が行われるようにする。このようにすれば、より細かく推定積載重量に応じた最適なABS制御を行うことが可能となる。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】車両が横転しそうなときの姿勢の安定性をより向上させる。
【解決手段】旋回中に横転検知パラメータがパラメータ閾値を越えることによって車両の横転傾向が検知されると少なくとも1つの車輪を制動することにより横転抑制制御を実行する車両用ブレーキ液圧制御装置であって、横転検知パラメータを取得するパラメータ取得手段(ロール角算出手段121)と、パラメータ閾値を設定するパラメータ計算手段127とを備え、パラメータ取得手段は、車両のロール角を横転検知パラメータとして取得し、パラメータ計算手段127は、車両のロール角の変化率である閾値計算用ロールレートを算出し、当該閾値計算用ロールレートが大きい程小さい値となるようにパラメータ閾値を設定する。
(もっと読む)
回生制動制御装置
【課題】回生式制動装置を備える車両において回生効率を向上させる。
【解決手段】回生制動制御装置24は、車両の前輪に回生制動力を伝達可能な第1回生制動手段56f、及び車両の後輪に回生制動力を伝達可能な第2回生制動手段56rの各々を制御する回生制動制御装置であって、第1回生制動手段及び第2回生制動手段の各々に要求される回生制動力の合計値である要求回生制動力を算出する要求回生制動力算出手段と、要求回生制動力を、第1回生制動手段及び第2回生制動手段で配分して実現する場合のエネルギ損失が、最も小さくなる配分比を算出する配分比算出手段と、算出された配分比で要求回生制動力を実現するように、第1回生制動手段及び第2回生制動手段を夫々制御する制御手段とを備える。
(もっと読む)
221 - 240 / 2,083
[ Back to top ]