
Fターム[3D246BA02]の内容
ブレーキシステム(制動力調整) (55,256) | ブレーキ型式 (2,987) | 液圧式ブレーキ (2,083)
Fターム[3D246BA02]に分類される特許
281 - 300 / 2,083
ブレーキ制御装置
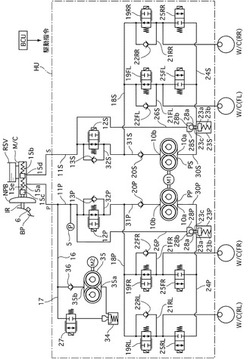
【課題】 ポンプの作動頻度を抑制できるブレーキ制御装置を提供する。
【解決手段】 2系統のブレーキ配管系のうちP系統に設けられ、マスタシリンダM/Cのプライマリ室15aとホイルシリンダW/Cとの間の第1ブレーキ回路(管路11,18)に配置されたゲートアウトバルブ12と、第1ブレーキ回路であってプライマリ室15aとゲートアウトバルブ12との間から分岐する還流油路部17を有する分岐油路16と、還流油路部17に設けられたストロークシミュレータバルブ27と、ストロークシミュレータバルブ27を経由しマスタシリンダM/Cからのブレーキ液が流れ込むリザーバ34と、リザーバ34を介してブレーキ液を吸入して還流油路部17から分岐油路16に吐出するポンプ35と、を備えた。
(もっと読む)
車両挙動制御装置

【課題】 ヨーレイトセンサの失陥時等における望ましくない車両挙動を抑制した車両挙動制御装置を提供する。
【解決手段】 制動継続時間Tbが第1故障判定閾値Tthに達することで、ステップS13の判定がYesになると、VSA−ECU6は、ステップS14で初期値1.0の制動ゲインGbから所定の漸減値ΔGbを減じた後、ステップS16で制動ゲインGbが0となったか否かを判定する。ステップS13の判定がYesの状態が所定時間続き、ステップS15の判定がYesになると、VSA−ECU6は、ステップS16で制動禁止フラグFpbを1とした後、ステップS17で失陥時処理を実行して制動禁止判定制御を終了する。
(もっと読む)
液圧ブレーキシステム
【課題】ブレーキシステムの自己診断機能において、作動液の温度が低下している状況下における誤検出を防止する。
【解決手段】走行中において、動力式液圧源装置によって発生させられる液圧が閾液圧PBより低い状態が閾継続時間TB以上続いた場合に、ブレーキシリンダへの作動液の供給を、動力式液圧源装置からマスタシリンダ装置に切り換えるように構成されたブレーキシステムを、作動液の温度が設定温度より低下していると推定される場合に、閾液圧を低い値PB'することと、閾継続時間を長い値TB'とすることとの少なくとも一方を行うように構成する。作動液の温度が設定温度より低下している状況下において、誤って動力式液圧源装置の異常と診断されることを回避することが可能である。
(もっと読む)
ハイドロブレーキ制御装置
【課題】ブレーキアシスト制御が機能している状態で、アンチロックブレーキが作動しても、所望のブレーキ制動力を維持可能とするハイドロブレーキ制御装置を提供することを目的とする。
【解決手段】運転者によるブレーキ操作部材の操作量に応じて加圧した作動流体の供給を受けて、車輪に制動力を付与するホイールシリンダと、ホイールシリンダに供給する作動流体を加圧する動力液圧源と、車輪がロックしないように作動流体のホイールシリンダへの供給を一時遮断するアンチロックブレーキと、動力液圧源で圧力が増大された作動流体をホイールシリンダに供給する場合に、アンチロックブレーキが作動すると、所定の増圧処理を行うブレーキ制御部とを備えるハイドロブレーキ制御装置とする。
(もっと読む)
タイヤ接地状態推定装置
【課題】タイヤ接地状態の推定精度を向上させる。
【解決手段】転舵角、車速、及び前輪の路面摩擦係数に基づいて、前輪SAT推定値を推定し、車速に基づいて、後輪スリップ率推定値を推定し、転舵角、車速、及び後輪及び前輪の路面摩擦係数に基づいて、車両の横加速度推定値を推定する。一方、前輪のSAT検出値を検出し、後輪スリップ率検出値を検出し、車両の横加速度検出値を検出する。そして、前輪SATの推定値と検出値との差分で定義される前輪SAT推定誤差を演算し、後輪スリップ率の推定値と検出値との差分で定義される後輪スリップ率推定誤差を演算し、横加速度の推定値と検出値との差分で定義される横加速度推定誤差を演算する。そして、前輪SAT推定誤差、後輪スリップ率推定誤差、横加速度推定誤差のうち、少なくとも一つに応じて、後輪及び前輪の路面摩擦係数を補正する。
(もっと読む)
ソレノイド駆動装置
【課題】駆動時に発生する熱を低減できるソレノイド駆動装置を提供する。
【解決手段】ソレノイド駆動装置100において、第1リレー20は、第1電源部30とソレノイド40との接続をオンまたはオフする。第2リレー22は、第2電源部32とソレノイド40との接続をオンまたはオフする。統合IC10は、第1リレー20および第2リレー22からのソレノイド40への通電を切り替え、ソレノイド40への通電を切り替える間、第1リレー20および第2リレー22のそれぞれの通電をともに所定時間オン状態にするよう制御する。第1トランジスタ60は、第2電源部32と第1リレー20との接続をオンまたはオフする。第1リレー20または第2リレー22に不具合が生じた場合、統合IC10は、第1トランジスタ60または第2トランジスタ62の一方をオンする。
(もっと読む)
駆動力伝達装置
【課題】装置を小型軽量化できると共に応答遅れを極めて少なくでき、さらに前輪または後輪のスリップ時のトラクションを向上できる駆動力伝達装置を提供すること。
【解決手段】駆動源5の駆動トルクは中央差動制限装置7から前部差動装置4及び後部差動装置10に分配され、前部差動装置4及び後部差動装置10に分配された駆動力は、前輪2FL,2FR及び後輪2RL,2RRに分配される。前部差動装置4及び後部差動装置10の少なくとも一方と、中央差動制限装置7とはトルク感応式の差動制限装置で構成されているので、装置を小型軽量化できる。また、車輪2のスリップ時には、スリップした車輪2の駆動力が、トルク感応式の中央差動制限装置7により前輪2FL,2FR又は後輪2RL,2RRに増幅して非差動で分配される。その結果、スリップ時のトラクションを向上できると共に、時間的な応答遅れを極めて少なくできる。
(もっと読む)
自動車用自動減速装置
【課題】実目標位置での目標速度に対する速度誤差を小さくし、運転者に与える違和感の少ない減速パターンを設定可能な自動車用自動減速装置を提供する。
【解決手段】目標位置P0での目標速度vtに向かって初めは大きい減速度a1で減速を行い、目標位置P0に向けて小さい減速度a2とすることにより実目標位置Prでの速度誤差Δvを小さくすることができる。自動ブレーキをかける際には、ナビゲーション装置での位置検出誤差を原因として目標速度vtに達する地点がばらつくことになるので、第2減速度a2に対応する低いGで誤差を感じないようにすることができる。最初は、第1減速度a1に対応する大きなGで、目標地点に近づいたらGを弱くしているので、違和感が低減される。
(もっと読む)
トラクションコントロール装置
【課題】車両速度の推定にあたり、実際の車両速度との誤差が生じた場合であっても、適切に制御することができるトラクションコントロール装置を提供すること。
【解決手段】車両速度推定装置及び駆動力制御装置を備えたトラクションコントロール装置は、駆動力制御装置を構成し、回転速度検出手段で検出された回転速度から各車輪のスリップ率を算出して、算出されたスリップ率が一定の目標値に収束するように、制動機構の制御を行う制動機構制御手段84と、車両速度推定装置で推定された建設車両の車両速度、及び、制動機構制御手段84で算出されたスリップ率に基づいて、駆動力制御装置による駆動力制御のバランス状態の適否を判定する車両状態判定手段815と、バランス状態が不適であると判定されたら、駆動力制御装置による駆動力制御の状態を変更する駆動力制御変更手段816とを備えている。
(もっと読む)
車両の制動力保持制御装置
【課題】車両発進時の異音の発生を抑制することができる車両の制動力保持制御装置を提供すること。
【解決手段】マスタシリンダ5とホイールシリンダ6とを接続するブレーキ液圧通路7に電磁弁8を設け、車両停止時に前記電磁弁8を閉状態としてホイールシリンダ6側のブレーキ液圧通路7に所定のブレーキ液圧を保持して車両の移動を阻止する車両の制動力保持制御装置において、車両停止時にホイールシリンダ6側のブレーキ液圧通路7に保持されているブレーキ液圧を、ブレーキペダル3を開放した時点で前記電磁弁8を所定の第1開度まで開くことによって所定の維持圧まで下げる1次減圧制御を行う。又、前記維持圧を路面の傾斜に関わらず車両の停止が維持されるに必要十分な値に設定する。
(もっと読む)
車両用制動装置
【課題】ビルドアップ制御を行う車両制動装置において、ビルドアップによる制動力を適切に設定する。
【解決手段】モータ駆動シリンダ8と、ペダルストロークセンサ11aと、ディスクブレーキ3と、制御ユニット6とを有するブレーキ装置であって、ブレーキ液圧を検出する液圧センサ16を有し、制御ユニットが、ブレーキペダル操作量の変化量に応じて、通常マップと、ビルドアップマップとのいずれかを選択し、ブレーキペダル操作量に基づいて選択したマップを参照し、ブレーキ液圧規範値を設定するブレーキ液圧規範値設定部23と、ブレーキ液圧規範値とブレーキ液圧との差に基づいてブレーキ液圧規範値を補正する補正値設定部25および加算器26と、補正されたブレーキ液圧規範値に応じて目標値を設定するストローク目標値設定部28とを有する。
(もっと読む)
車両制御装置
【課題】減速中にエンジンに対する燃料の供給を停止し、かつエンジンと駆動輪との動力の伝達を遮断する場合の制動力の変動を抑制することができる車両制御装置を提供すること。
【解決手段】エンジンと、開放することによってエンジンと駆動輪との動力の伝達を遮断するクラッチと、制御可能な制動装置と、を備え、減速時にエンジンを停止(S4)し、かつクラッチを開放する(S3)ときに、制動装置が発生する制動力を減少させる(S5,S6)。
(もっと読む)
車両挙動制御装置
【課題】車両挙動の安定化制御の制御性能を向上させること。
【解決手段】実旋回状態と目標旋回状態との偏差に応じた目標旋回制御量を所定の制御対象輪の車輪制動力によって発生させることで車両挙動の安定化制御を行う際、2つのブレーキ液圧の液圧系統の中で制御対象輪の属するものを液圧制御対象に設定して当該液圧系統のマスタカット弁41を閉弁させると共に、他方の液圧系統を非液圧制御対象に設定して当該液圧系統のマスタカット弁42を開弁させ、液圧制御対象の液圧系統のブレーキ液圧を調圧することで制御対象輪に前記車輪制動力を発生させる車両挙動制御装置であって、車体の実旋回挙動量が所定量を超える場合又は目標旋回制御量の絶対値が所定量を超える場合、両方の液圧系統を液圧制御対象に設定し、夫々の液圧系統に属する夫々の制御対象輪の車輪制動力で安定化制御を行うこと。
(もっと読む)
パーキングロック装置
【課題】車両の停止状態を保持するようにパーキングロック機構が作動した後に、ブレーキ装置の操作を解除しても予期しない車両の揺動の発生を防止することが可能なパーキングロック装置を提供することを目的とする。
【解決手段】パーキングロック条件が満たされた場合に、Pレンジ成立装置31がパーキングロック機構14をロック状態とする前に、傾斜方向検出装置95で検出された傾斜方向と車両の停止時に自動変速機1によって成立されている走行レンジとに基づいて、車両が路面の傾斜を下る方向に走行する状態から停止したことを検出すると、車両が路面の傾斜を上る方向の走行レンジを自動変速機1に一旦成立させた後に、Pレンジ成立装置31にパーキングロック機構14をロック状態にさせてPレンジを成立させるパーキングロック制御装置32と、を備えるパーキングロック装置。
(もっと読む)
液圧ブレーキシステム
【課題】動力制御圧供給状態からマニュアル液圧供給状態に切り換えた後の運転者の違和感を軽減し、作動音を低減させる。
【解決手段】動力制御圧供給状態からマニュアル液圧供給状態に切り換えられた時以後に、ブレーキペダルの操作状態がほぼ一定である場合には、マニュアル液圧Pmは、過渡的に、一旦低下した後に増加する。それにより、運転者は違和感を感じる。また、作動音が発せられる。それに対して、減圧リニア制御弁の制御により、ブレーキシリンダ液圧の増加勾配が抑制されるとともにマニュアル液圧の増加勾配が抑制される。それによって、運転者の違和感を軽減し、作動音を低減させることができる。
(もっと読む)
車両の状態量計測用制御システム
【課題】駆動輪のみを回転させる台上試験において、従動輪を備える車両の状態量を治具を用いずに簡易に計測することが可能な車両の状態量計測用制御システムを提供する。
【解決手段】備えた車両の状態量計測用制御システム30は、駆動輪である左右前輪の車輪速度を検出する左右前輪速度センサ31a,31b及び従動輪である左右後輪の車輪速度を検出する左右後輪速度センサ31c,31dによって検出された左右前輪の車輪速度及び左右後輪の車輪速度に基づいて、車両を制御するENG−ECU33a,VSA−ECU33b,AHB−ECU33cを備え、ENG−ECU33a,VSA−ECU33b,AHB−ECU33cは、外部端末装置40から台上試験中である旨の信号が入力された場合には、左右後輪の擬似車輪速度を生成し、検出された左右後輪の車輪速度に代えて、生成された左右後輪の擬似車輪速度を左右後輪の車輪速度とする。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
ブレーキ制御装置
【課題】 回生協調制御時のペダルフィールの向上を図ることができるブレーキ制御装置を提供する。
【解決手段】 ブレーキ液が流入可能な液吸収シリンダ15と、マスタシリンダM/CとホイルシリンダW/Cとを接続する第1ブレーキ回路(管路11,18)とポンプPの吐出部10bと接続する第2ブレーキ回路(管路31)との接続位置と、第1ブレーキ回路上であって第2ブレーキ回路の接続位置よりもマスタシリンダM/C側に設けられたゲートアウトバルブ12との間の第1ブレーキ回路から分岐し、液吸収シリンダ15に接続する管路16と、この管路16に設けられたストロークシミュレータバルブ17と、を備える。
(もっと読む)
制動力制御装置
【課題】悪路走行時においても好適にEBD制御を実施可能とする。
【解決手段】制動力制御装置は、左後輪(WRL)に対応する第1油圧系統及び右後輪(WRR)に対応する第2油圧系統を備える車両の制動力を制御する。制動力制御装置は、各車輪の車輪速度を検出する車輪速度検出手段(83)と、後輪の車輪速度が所定の条件を満たした場合に、前輪及び後輪の動作量の差に基づいて第1及び第2油圧系統を制御することで、左後輪及び右後輪の制動力制御を独立して行う制御手段(110,120)と、車両が悪路を走行していることを検出する悪路検出手段(130)と、車両が悪路を走行していることが検出されており、左右いずれかの後輪の車輪速度が所定の条件を満たしている場合に、左後輪及び右後輪の各々のブレーキ油圧を油圧保持制御するよう制御手段を制御する油圧保持制御手段(140)とを備える。
(もっと読む)
車両用ブレーキ装置
【課題】電動アクチュエータにより発生させるブレーキ力の応答性を、簡単な構成で、より一層高める。
【解決手段】ホイールシリンダにブレーキ液圧を与えるモータ駆動シリンダ13を、ブレーキ操作量に応じて求められた目標モータ角θtと実モータ角θmとの偏差Δθが大きい場合に弱め界磁制御を行って駆動制御する。電動アクチュエータの作動量として例えばモータ角(回転量)を用いる場合には公知の簡単かつ安価な回転センサ等で高精度な検出が可能であり、モータ角の変動レンジが広くなり、制動応答性を容易に高めることができる。また、負荷剛性の変動による影響を受けることが無く、弱め界磁制御の開始直後の過渡状態においてモータ角の偏差は生じており、弱め界磁制御を継続して実行することができ、モータの応答特性の変動が低減され、安定した応答特性が得られる。
(もっと読む)
281 - 300 / 2,083
[ Back to top ]