
Fターム[3D246GA02]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−解決課題 (3,487) | 車両情報、車外情報の推定 (185)
Fターム[3D246GA02]に分類される特許
41 - 60 / 185
車両の制動制御装置
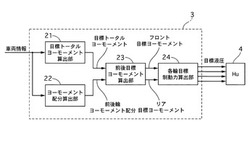
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
車両制御装置

【課題】先々行車両の存在の検出精度を向上することが可能な車両制御装置を提供する。
【解決手段】本発明の一実施形態に係る車両制御装置1は、反射体を利用してレーダ20によって先々行車両を認識し、当該レーダ20によって認識された先々行車両に基づいて自車両の走行制御を行う車両制御装置において、道路以外の反射体を認識する反射体認識手段42と、レーダ20によって先々行車両が認識されない場合であっても、反射体認識手段42によって道路以外の反射体が認識されない場合には、先々行車両がいるかもしれないと推定する先々行車両推定手段43と、レーダ20によって先々行車両が認識されない場合であっても、先々行車両推定手段43によって先々行車両がいるかもしれないと推定された場合には、自車両の走行制御を行う走行制御手段44とを備える。
(もっと読む)
車両の制御装置及び車両の制御方法
【課題】運転手によるブレーキ操作に基づき車両のエンジンを自動的に停止させる機能を有する車両において、制動制御を阻害することなくエンジンを速やかに再始動させることができる車両の制御装置及び車両の制御方法を提供する。
【解決手段】ブレーキ用ECUは、車輪に制動力が付与されない状態で走行する場合における車両の加速度の推定値として惰性加速度Dgを取得し(ステップS27)、該惰性加速度Dgに基づき第1車速推定値VS1を取得し(ステップS28)、取得した第1車速推定値VS1が制動制御許可基準値KVS未満である場合に(ステップS29:YES)、エンジンの再始動を許可する(ステップS30)。
(もっと読む)
車両制御装置
【課題】車両停止時だけでなく車両減速時にIS制御によるエンジン停止を実行したとしても、ブースタ負圧の低下によって制動力が低下することを抑制できるようにする。
【解決手段】エンジン再始動用の第1の閾値とブレーキ助勢用の第2の閾値という2つの閾値を設定し、ブースタ負圧を第1、第2の閾値と比較し、ブースタ負圧が第1の閾値以下になるとエンジン1を再始動させ、第2の閾値以下になるとブレーキ助勢を行う。これにより、ブースタ負圧が低下したときに、エンジン1を再始動させることによるブースタ負圧の復帰を図りつつ、負圧助勢機能の低下に伴う制動力の低下を抑制することが可能となる。したがって、車両停止時だけでなく車両減速時にIS制御によるエンジン停止を実行したとしても、ブースタ負圧の低下によって制動力が低下することを抑制することが可能となる。
(もっと読む)
運転支援装置
【課題】本発明は、運転支援のための各種のデバイスに故障が発生した場合であっても適切な運転支援を実現する。
【解決手段】運転支援装置1は、車両の運転者に対して、車両の運転におけるリスクの対象となる対象物を回避するために、対象物及び車両の状況に応じて算出された衝突余裕時間及び対象物が車両の予測進路上に移動する可能性の度合いを示す推定危険度に基づき運転支援形態を判定し、判定された運転支援形態に基づき運転支援のための1つ以上のデバイスを制御することにより運転支援を実施する装置であって、デバイスの故障を検出する故障検出部20と、デバイスによる運転支援が安全に寄与する度合いを示す値である安全寄与率と、故障検出手段により検出された故障デバイスに関する情報とに基づき推定危険度を増加させる危険度増分値算出部12、推定危険度判定部13とを備える。
(もっと読む)
冷却装置
【課題】摩擦ブレーキまたは電動モータの温度に基づいて、摩擦ブレーキおよび電動モータ制動力を制御することのできる冷却装置を提供する。
【解決手段】回生制動力を発生する電動モータと、電動モータに供給する電力を蓄え、かつ、電動モータで発電した電力が充電される蓄電装置と、電動モータを冷却する熱電素子とを備えた冷却装置において、制動力を発生する摩擦ブレーキを有し、蓄電装置の充電量を判断する充電量判断手段(ステップS1)と、必要な制動力を判断する制動判断手段(ステップS6)と、電動モータまたは摩擦ブレーキの温度を判断する温度判断手段(ステップS5)と、蓄電装置の充電量が所定値以上であり、かつ、必要な制動力が所定値以上である場合は、電動モータまたは摩擦ブレーキの温度に基づいて、摩擦ブレーキおよび電動モータの制動力を制御し、さらに熱電素子で電動モータを冷却する制御手段(ステップS7,S8)とを備えている。
(もっと読む)
車両の運動制御装置
【課題】車両の実姿勢状態量、特に、実車体横滑り角の推定精度が悪化する場合にも、車両の運動制御性能が低下しない車両の運動制御装置を提供する。
【解決手段】車両の運動制御装置は、コントロールユニット37、並びに、センサ2,3,4,30,31,32,33等を含んで構成されている。実状態量取得部52は、実車体横滑り角βz_act等を演算する。規範動特性モデル演算部54は、動特性モデルを用いて、規範車体横滑り角βz_d等を演算する。そのほかに実車体横滑り角βz_actにもとづいて第1のアンチスピン・目標ヨーモーメントMc1_aspを演算する第1のアンチスピン目標ヨーモーメントFB部68、横方向加速度Gs、車速Vact、実ヨーレートγactにもとづいて第2のアンチスピン・目標ヨーモーメントMc2_aspを演算する第2のアンチスピン目標ヨーモーメントFB部82を有している。
(もっと読む)
車両用制動装置
【課題】セルフサーボ効果の有無を考慮して電動アクチュエータの作動を制御する車両用制動装置を提供する。
【解決手段】電子制御ユニット21のCPU21aは、車両の減速に伴って、車速センサ24から入力した車速Vが所定の小さな車速V0以下となるとき、セルフサーボ効果が無効化したと判定する。次に、CPU21aは、現在、電動アクチュエータ13に供給しているモータ電流値Iに対応して前記効果が発生している場合の荷重と前記効果が無効化した場合の荷重との荷重差ΔFを決定し、この荷重差ΔFを荷重センサ22から入力した検出荷重Fに加算して補正する。そして、CPU21aは、補正した検出荷重Fと車両を減速させるために決定した目標荷重Fdとの差分を計算し、この差分に基づいてアクチュエータ13の駆動を制御する。これにより、前記効果の有無によってアクチュエータ13に供給する電流値Iの急増を防止し、連続性を保つことができる。
(もっと読む)
運転アシストシステム
【課題】、効率的な運転アシストを行うことが可能な運転アシストシステムを提供する。
【解決手段】本発明の運転アシストシステムは、車両に搭載され車両の運転をアシストする運転アシストシステムであって、現在地、及び、現在地と目的地との間、及び、目的地に評価ポイントを設定する評価ポイント設定手段と、それぞれの評価ポイントにおいて、時間に応じて変動する第1評価関数を算出する第1評価関数算出手段(ステップS205)と、少なくとも前記第1評価関数を含む累積評価関数を算出する累積評価関数算出手段(ステップS206)と、前記目的地における評価ポイントの累積評価関数が最大となるように運転アシスト動作(ステップS209)を行う運転アシスト手段と、を有することを特徴とする。
(もっと読む)
車両
【課題】通知システム及び減速支援システムの両方を運転者の期待通りに作動させる。
【解決手段】車両(1)は、所定の通知条件が成立したことを条件に、信号機の灯色が赤である期間の残り時間を通知する通知システム(10)と、所定の減速支援条件が成立したことを条件に、車速が低下するように所定の減速制御を行う減速支援システム(20)と、を備える。車両は、所定の減速支援条件が成立した場合に、所定の通知条件を緩和する条件緩和手段(109)を備える。
(もっと読む)
走行支援装置
【課題】自車両が走行車線を離れる際に警報を行うことで安全走行を支援する走行支援装置において、車線変更時の安全性を向上させること。
【解決手段】後続車両が存在するか否かを判定する(S110)。後続車両が存在すると判定された場合には(S110:YES)、運転者に車線変更の意図があるか否かを判定する(S120)。具体的には、ドライバ操作判定部が、ステアリングセンサから入力された自車両のステアリングホイールの操作状態からステアリングホイール操作の有無を判定する。運転者に車線変更の意図があると判定された場合には(S120:YES)、自動ウインカをONに設定するとともに警報ACTによる報知警報をONに設定する(S130)。なお、自動ウインカがONに設定されると作動機能調停部が自動ウインカを作動させ、警報ACTによる報知警報がONに設定されると作動機能調停部が警報ACTを作動させる。
(もっと読む)
走行支援装置
【課題】車両前方の障害物に関する情報を、道路状況に応じて適切なタイミングで提供する。
【解決手段】障害物の発生位置に基づき目標停止位置Xstopを算出し(ステップS21)、道路形状に基づき自車両が目標停止位置Xstopに至るまでの車速パターンを作成し、この車速パターンで走行する際の運転者の操作負荷量Wloadを、加減速負荷量、操舵負荷量等の身体負荷量と、前方注視負荷量、確認負荷量等の認知負荷量とから予測する(ステップS22)。操作負荷量Wloadがしきい値を超える区間を運転負荷増大区間とし、この区間に目標停止位置Xstopに基準減速度Ginfoで停止するための情報提供位置Xinfoが含まれる場合には、運転負荷増大区間の開始点から所定量だけ自車両よりの位置での車速に基づき、自車両が目標停止位置Xstopに停止するための必要減速度Greqがしきい値を超えているかを判定し、しきい値をこえているときに障害情報の提供を行う。
(もっと読む)
減速支援システム
【課題】車両の運転者の意図に沿った減速支援制御を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が交差点に進入することを検知する第1検知手段(109)と、車両が交差点に進入した際に、減速制御開始条件が成立したことを条件に、減速支援制御を行う第1減速支援手段(109)と、車両が交差点を右折又は左折するか否かを判定する右左折判定手段(109)とを備える。車両が交差点を右折又は左折すると判定された場合、第1減速支援手段は、車両の運転者が、車両を右折又は左折させるためにハンドルを操舵した方向とは反対方向にハンドルを操舵し始めたタイミングで、減速支援制御を終了する。他方、車両が交差点を右折又は左折しないと判定された場合、第1減速支援手段は、運転者が、アクセルオフからアクセルオンにしたタイミングで、減速支援制御を終了する。
(もっと読む)
車両の制御装置
【課題】自動車等の車両において、適切なタイミングで運転支援制御を実行する。
【解決手段】車両の制御装置は、車両が停止する際の状況を検出する状況検出手段130と、車両が停止する際の運転者による減速タイミングを検出する減速検出手段140と、状況及び減速タイミングを互いに関連づけて学習を行う学習手段120と、学習後に、走行中の車両が学習された状況に近い状態となったことを認識する状況認識手段150と、状況に近い状態であることが認識された場合に、学習された状況に関連づけられた減速タイミングに応じて運転支援制御を行う運転支援制御手段160とを備える。
(もっと読む)
衝突被害軽減装置
【課題】衝突被害軽減装置のカーブ路入口走行時の誤動作を抑制する。
【解決手段】レーダーで検出した車両前方の停止物ターゲットが自車線内に所定時間以上存在することを、該停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識する条件としたものにおいて、自車のヨーレート(車両の旋回方向への回転角の変化する速度)の単位時間当たりの変動量が所定閾値以上であるときは、カーブ路入口を走行していると判断し、前記所定時間を計測するためのタイマをリセットすることにより、停止物ターゲットを衝突被害軽減装置の制御対象となる障害物として認識することを禁止する。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
車両運動制御装置及び車両運動制御プログラム
【課題】簡単な構成のマップを用いて目標位置及び目標位置における速度方向に到達するために最大値が最小となる車体合成力を導出する。
【解決手段】記憶された自車両と目標位置との間の距離のx成分Xeとy成分Yeとの比で定めた第1のパラメータ、自車両の速度のx成分vx0とy成分vy0との比で定めた第2のパラメータ、及び目標位置及び目標位置における速度方向に到達するために最大値が最小となる車体合成力を求めるために導入した第1の導入パラメータν1の関係を定めた第1のマップ、第1のパラメータ、第2のパラメータ、及び第2の導入パラメータν2の関係を定めた第2のマップ、並びに第1のパラメータ、第2のパラメータ、及び目標位置に到達する時刻teの関係を定めた第3のマップと、現在の自車両と目標位置との間の距離及び自車両の速度に基づいて演算された第1のパラメータ、第2のパラメータとを用いて車体合成力を導出する。
(もっと読む)
車両運動制御装置
【課題】横転抑制制御を行う必要がないときにまで横転抑制制御が行われてしまうことを防止する。
【解決手段】横転抑制制御の開始条件(Gy>Gs)が満たされることによって一旦横転抑制制御が開始されたとしても、横転抑制制御開始から待ち時間T1が経過した時点で横転抑制制御を継続するべきか中断すべきかを判定する。そして、横転抑制制御を中断すべきと判定されたときに、横転抑制制御の開始条件を満たしていてもそれを継続しないようにする。これにより、本来横転に至らない状況まで横転抑制制御が継続されてしまうことを抑制することができる。
(もっと読む)
車両制御装置および車両制御方法
【課題】走行実績のある走行情報を使用して、安全な運転計画を生成することが可能な車両制御装置および車両制御方法を提供することを目的とする。
【解決手段】運転計画生成ECU18は、自車または他車の走行実績のある走行情報(前後Gx、横Gy、および位置情報等を含む)を入力し、走行実績のある前後Gxおよび横Gyに基づいて、運転計画の対象となる道路の路面μを推定し、推定した路面μに基づいてタイヤ発生力を算出し、算出したタイヤ発生力を超えない条件で運転計画を生成する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】減圧制御時の制御時間を長くとることができるとともに、フェールセーフ機能の確実性を高める。
【解決手段】マスタシリンダMC1と車輪ブレーキFとの間に配置され、制御手段によってアンチロックブレーキ制御可能な入口弁2および出口弁3を有する車両用ブレーキ液圧制御装置Uにおいて、出口弁3とマスタシリンダMC1に設けられた大気開放型のオイルリザーブタンク10Aとの間を接続し、出口弁3を通じて逃がされた作動液をオイルリザーブタンク10Aに戻す開放路Q1と、開放路Q1に設けられ、開放路Q1を遮断または開放する開放路用電磁弁6と、を具備した構成とする。
(もっと読む)
41 - 60 / 185
[ Back to top ]