
Fターム[3D246GA02]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−解決課題 (3,487) | 車両情報、車外情報の推定 (185)
Fターム[3D246GA02]に分類される特許
101 - 120 / 185
車両の制御装置
【課題】道路の勾配変化によって車両前方の見通しが損なわれる場合において、適切な時点(地点)にて運転者に的確な情報を提供し、又は、車両が安定して走行できるように車両を制御すること。
【解決手段】車両前方にある道路の勾配情報Kr,Prに基づいて、車両の運転者が道路の前方を見通せない区間(見通し不可区間)が車両前方に存在するか否かが判定され、見通し不可区間が存在すると判定された場合、勾配情報に基づいて見通し不可区間の終了地点(見通し地点Pm)が設定される。この見通し地点Pmと現在の車両位置Pvhとに基づいて、運転者に対する報知制御、車両の速度制御、及び、車両の操舵比制御のうち少なくとも1つ以上の制御が実行される。これらの制御実行に使用されるパラメータは、見通し地点Pmの前方にある道路のカーブ情報Rc,Pc、勾配情報に基づいて調整される。
(もっと読む)
ブレーキ制御装置

【課題】ブレーキ制御装置の異常時の無用な動作を抑制する。
【解決手段】ブレーキ制御装置は、ストロークセンサと、作動液圧センサと、ストップランプスイッチと、制御部と、を備える。制御部は、ストロークセンサの測定値に基づいてブレーキ操作の有無を判定する第1判定と、作動液圧センサの測定値に基づいてブレーキ操作の有無を判定する第2判定と、を並列に行い、第1判定及び第2判定の少なくとも一方でブレーキ操作有りと判定した場合に運転者がブレーキを操作したと判定する。制御部は、第1判定でブレーキ操作無しと判定しているときに第2判定でブレーキ操作有りと判定した場合には、ストップランプスイッチから入力される信号がブレーキ操作無しを示していることを条件として運転者がブレーキを操作していないと判定する。
(もっと読む)
走行制御装置
【課題】
従来技術によれば、カーブの実状況を反映していないため、車速制御を行うための情報が不足し、適切な速度制御が実現できない、という課題がある。
【解決手段】
本走行制御装置は、走行車線を認識する認識部と、自車前方に存在するカーブの情報を取得する取得部と、当該情報に基づいてカーブにおける自車の目標速度を算出する算出部と、目標速度に基づいて自車を制御する制御部を備え、認識部は走行車線の幅を認識し、算出部は幅に基づいて目標速度を変更する。算出部は、幅に対応する基準値を設定し、基準値より小さい幅では目標速度を小さく変更し、基準値より大きい幅では目標速度を大きく変更してもよい。又、制御部は、幅が基準値より小さい時は、目標速度による車両制御を中止してもよい。
(もっと読む)
停止制御装置
【課題】電気ブレーキと空気ブレーキとの切り替わったタイミングを正確に推定し、駅定点停止制御において使用すべきブレーキモデルを誤判断無く適切に選択して精度のよい駅定点停止制御を行う停止制御装置を提供する。
【解決手段】ブレーキモデル選択情報に基づき列車を目標とする地点に停車させるための停止制御に必要なブレーキノッチ指令を生成して出力する駅定点停止ノッチ制御部6とを備え、ブレーキモデル判断部20は、列車の速度を検出する列車走行速度検出部1と、速度を微分することにより減速度を算出する減速度演算部2と、減速度の波形を微分することによりジャーク波形を算出するジャーク演算部3aと、ジャーク波形に基づき電気ブレーキと空気ブレーキとの切替が発生したか否かを判断する電気ブレーキ/空気ブレーキ切替発生判断部4と、切替の判断結果に基づきブレーキモデルを選択するブレーキモデル選択部5とを有する。
(もっと読む)
タイヤ状態推定装置及びタイヤ状態推定方法
【課題】自動車両の動的挙動の安定化に資するべく、タイヤの状態を正確に推定すること。
【解決手段】タイヤ横力上限推定値、及び車両状態測定値に基づいてタイヤ横滑り角推定値を計算するタイヤ横滑り角推定器と、タイヤセルフアライニングトルク測定値、及び前記タイヤ横滑り角推定器によって計算された前記タイヤ横滑り角推定値に基づいて前記タイヤ横力上限推定値を計算する横力上限推定器と、によってタイヤ状態推定装置を構成する。
(もっと読む)
加減速制御装置
【課題】運転者の加減速意図に沿う制御量で車両を加減速させる加減速制御装置を提供する。
【解決手段】加減速制御装置6は、自車両1の前後加減速度を制御する前後加減速制御部400と、前後加減速制御部400に制御介入して前後加減速度を補正する補正制御部500と、補正制御部500による制御介入を許可または禁止する制御介入許可判断部300を有する。そして、自車両1の横加々速度に基づき自車両1の前後加減速度を補正し、自車両1の前後加減速度の補正を所定条件に基づき許可または禁止する処理を行う。これにより、自車両1の動作を、より運転者の加減速意図に沿ったものとし、前後加減速度の補正制御に起因した運転者の違和感を低減する。
(もっと読む)
車両の運転支援装置
【課題】ドライバの運転操作を適正な特性に改善して安全性の向上を図る。
【解決手段】制御ユニット10は、先行車情報を基にリスクRdを設定し、リスクRdと比較する警報閾値Rw(k)をリスクRdに基づき演算し、アクセル開度が減少したときのリスクRdと警報閾値Rw(k)との差を監視して、現在の運転状態がドライバの通常の運転特性に適応した運転状態である適応完了状態か否か判定する。この判定の結果、適応完了状態の際に、警報閾値Rw(k)と予め設定した値Rcとを比較し、更に、ドライバの通常の制動時における運転特性を予め設定した制動時における運転特性と比較して、注意喚起警報制御装置8によりドライバに注意を行うことでドライバの運転操作を適正な特性に改善する。また、リスクRdと警報閾値Rw(k)とを比較することにより、警報制御を実行する。
(もっと読む)
電動ブレーキ
【課題】ブレーキディスクに対するピストン押付力を的確に制御できる電動ブレーキを提供する。
【解決手段】電動モータの回転作動によって非回転ブレーキディスクに対して押付けられるピストンを備え、制御指令値uに基づいて電動モータを駆動するコントローラ20は、制御指令値uと制御出力yに応じて算出される外乱dの推定量eと制御ゲインgに応じて外乱フィードバック量Lを設定する外乱応答補償部41を備え、制御ゲインgは制御指令値uに対する目標指令値rの比率u/rに応じて設定される構成とした。
(もっと読む)
車両用歩行者検出装置
【課題】歩行者の立ち止まりからの動き出しについて精度良く判定できる車両用歩行者検出装置を提供する。
【解決手段】歩行者の挙動(走行路横断行動)に関し、歩行者の意思が反映された膝部位置移動速度及Vkt及び肩部位置移動速度Vstを用いて、歩行者動き出し条件式を、膝部及び肩部の運動エネルギの形(Vst/α)2+(Vkt/α)2>1 (但し、Vst>0且つVkt>0、α:正規化係数)とすることにより、その運動エネルギにおける速度の2乗値に基づき、歩行者8の挙動予測に及ぼす膝部位置移動速度Vkt及び肩部位置移動速度Vstの反映度を高め、判定精度を高める。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】車線区分線の認識度が低くても、運転者の運転を支援する支援制御を適切に行うことが可能な車両運転支援を提供する。
【解決手段】予め設定した所定時間後の自車両の将来の横位置を予測する。その予測した自車両の将来の横位置が、車線区分線を基準として予め定められた所定の車線幅方向位置よりも自車線中央側からみて外側に位置すると判定すると、自車線中央側に向かうヨーモーメントを車両に付与するように車両制御を開始する。このとき、前記車線区分線を検出できない若しくは認識度が低い場合には、車線区分線を正常に検出しているときと比較して、前記制御を抑制する。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】車線区分線を推定する場合でも、適切なヨーモーメントの大きさにする。
【解決手段】車線逸脱防止装置は、車線区分線検出手段により車線区分線の検出精度が低下している場合、推定した車線区分線を基に、走行車線に対する自車両の逸脱を防止する車線逸脱防止制御を行い(ステップS11、ステップS12)、車線区分線の検出精度が低下している時間に応じて、車線逸脱防止制御の制御量を小さくする補正をする(ステップS3〜ステップS5)。
(もっと読む)
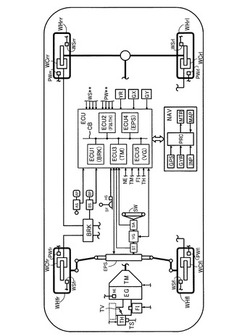
車両制御装置
【課題】制動力制御カットスイッチがオン状態であっても状況に応じて制動力制御を強制的に実行することにより、車両挙動の安定化を図る。
【解決手段】車輪の制動力を制御することにより車両挙動を制御する制動力制御装置20と、制動力制御装置の作動を禁止する制動力制御カットスイッチ14と、運転者の車外の生体に対する認識を支援するナイトビジョンシステム2と、を備える車両制御装置において、ナイトビジョンシステム2が歩行者等の生体を認識しており、車速が所定値以上であり、車両の周囲の照度が所定値以下であるときには、制動力制御カットスイッチ14がオン状態であっても制動力制御装置20の作動を許可する。
(もっと読む)
走行制御装置
【課題】状況に応じた適切な制御によって障害物との衝突の発生及び二次衝突の発生を回避できる走行制御装置を提供する。
【解決手段】走行制御装置1では、自車両が障害物と衝突する可能性があると判断したときに減速制御を実行し、自車両と障害物との衝突の発生を回避する。また、走行制御装置1では、周辺環境情報に基づいて定められる作動条件として、減速制御の実行開始から所定時間が経過するまでに実際に衝突が発生した場合、或いは自車両が交通弱者との衝突の可能性が他の場所に比べて高い交差点付近に位置している場合には、減速制御を開始してから所定時間が経過した後も減速制御を維持する。したがって、走行制御装置1では、状況に応じた適切な減速制御が実行され、二次衝突の発生を精度良く回避できる。
(もっと読む)
路面摩擦係数推定装置
【課題】差動制限機構付きの差動装置を備えた車両において、左右夫々の駆動輪がスリップしていると否とに拘わらず路面摩擦係数を推定すること。
【解決手段】差動制限機構付き差動装置20を備えた車両の路面摩擦係数推定装置(電子制御装置)であって、差動制限機構付き差動装置20への入力トルクを推定する差動装置入力トルク推定手段と、差動制限機構付き差動装置20への入力トルク及び同一車軸上の左右夫々の駆動輪(後輪WRL,WRR)の角速度に応じた当該各駆動輪への入力トルクを推定する駆動輪入力トルク推定手段と、駆動輪への入力トルク及び当該駆動輪の慣性トルクに基づいて当該駆動輪の車輪駆動力を推定する車輪駆動力推定手段と、駆動輪の車輪駆動力及び当該駆動輪の車輪接地荷重に基づいて当該駆動輪が接地している路面の路面摩擦係数を推定する路面摩擦係数推定手段と、を備えること。
(もっと読む)
車両制御装置
【課題】走行シーンに合わせた適切な車両制御を行う。
【解決手段】車両1が後退動作中である場合、制御部4が、車両1の進行方向と接近車両が走行している道路の延在方向とがなす角度に応じて制動制御作動距離を設定する。これにより、車両1後方に接近車両が通過可能なスペースがなく、運転者が後退操作を早く終了させることを望んでいる可能性が高いシーンでは遅いタイミングで制動制御が行われるようになるので、制動制御に対して運転者が感じる煩わしさや違和感を低減させることができる。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】前方の障害物などを操舵回避する際の、無用な制御介入を制限する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定の閾値XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、自車両が側方車両の側とは逆方向に横移動することを検知したら回避フラグをFa=1にセットし(ステップS6)、その後、今度は側方車両の側に横移動を開始したら復帰フラグをFr=1にセットする(ステップS7)。こうして復帰フラッグがFr=1にセットされたら、設定時間Tmが経過するまで抑制フラグをF=0にリセットし、横移動の抑制を禁止する(ステップS9)。
(もっと読む)
車両の制御装置
【課題】シフトバイワイヤシステムを有する車両の制御装置において、そのシフトバイワイヤシステムの異常が検出されたとき、好適な車両の駆動力抑制が実施される車両の制御装置を提供する。
【解決手段】シフトバイワイヤシステムの異常が検出され、且つ、車両停止が予測された場合、車両の駆動力を抑制する駆動力抑制手段134を備えるため、駆動力の抑制が車両停止が予測された場合のみ実施される。この状態では、仮に前後進切替操作が為されたときにシフトバイワイヤシステムの異常により前後進誤作動が発生しても、駆動力抑制手段134によって車両の駆動力が抑制されているため、運転者がアクセルを踏み込んでも車両の動き出しが鈍くなる。これより、車両の移動を最小限に抑制して、運転者がその異常に気付くことができる。
(もっと読む)
車両制御システム
【課題】
停止位置とカーブが近接又は重複した場合であっても、ドライバに煩わしさを与えることなく、適切に車両を制御するシステムを提供する。
【解決手段】
本車両制御システムは、自車位置を取得する自車位置取得部と、自車の車両情報を取得する車両情報取得部と、自車の前方に存在するカーブ又は一時停止場所の位置を取得するカーブ・停止位置情報取得部と、自車の前方にカーブが存在し、更にその先に停止位置が存在する場合、自車がカーブに入る手前で、減速を開始すべき減速開始位置を設定する減速開始位置設定部と、自車位置,車両情報、及び減速開始位置に基づいて、自車を制御するか否かを判断する判断部と、判断部が自車を制御すると判定した場合、自車を制御する制御部を備え、判断部は、自車が減速開始位置を所定速度以上で通過した場合、自車を制御すると判断する。
(もっと読む)
補助制動装置
【課題】緊急時に大きな制動力を効果的に得る。
【解決手段】
緊急制動判定装置16により緊急制動が必要である判定された場合、制動部材12内の火薬の爆発によって制動部材12が拡大し、下側が道路に接触することによって制動力が発生する。また、押しつけ制御機構により制動部材を上下に移動することで、道路への押しつけ力を制御する。従って、緊急時に、火薬の爆発による制動部材の拡大および押しつけ制御機構による押しつけ力によって制動力を得ることができる。
(もっと読む)
停車判定装置
【課題】自車両が停車状態になったか否かを精度良く判定することが可能な停車判定装置を提供する。
【解決手段】自車両Cが減速状態になった場合に、自車両Cの制動力及び駆動力に基づいて、自車両Cが停車するまでに必要な停車必要時間を算出する算出部11と、算出部11によって算出された停車必要時間が経過したか否かを判定する経過判定部13と、車輪速センサ5によって車輪速がゼロであると検出された自車両Cの車輪の数が所定数以上になったか否かを判定する車輪速判定部14と、経過判定部13によって停車必要時間が経過したと判定され、且つ、車輪速判定部14によって車輪速がゼロである車輪の数が所定数以上になったと判定された場合に、自車両Cは停車状態になったと判定する停車判定部15と、を備える。
(もっと読む)
101 - 120 / 185
[ Back to top ]