
Fターム[3D246GA02]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−解決課題 (3,487) | 車両情報、車外情報の推定 (185)
Fターム[3D246GA02]に分類される特許
161 - 180 / 185
車両用リスク推定装置

【課題】自車両の動きが他車両に与える影響を考慮してリスクを推定する車両用リスク推定装置を提供する。
【解決手段】自車両の後方を走行する後続車の自車両に対するリスク度を算出し、自車両がブレーキをかけた場合に後続車に与える影響を推定する。そこで、自車両に対する後続車のリスク度が自車両のブレーキ動作によってどのように変化するかを推定する。推定したリスク度変化に応じて自車両はどうするべきかを運転者に報知する。
(もっと読む)
旋回挙動表示装置

【課題】 旋回力の制御状況を瞬時に認識できるようにする。
【解決手段】 ヨーモーメント表示部31の基準部32から旋回方向に向かうセグメント33の表示数を旋回外輪と旋回内輪のトルクの相対的な差に応じて円弧状態に増減させ、車両のヨーモーメント制御量、即ち、旋回挙動(旋回力の状態)の制御状況を直感的に視認して旋回力の制御状況を瞬時に認識することができるようにし、車両の持つ走行性能と安全性能を確実に有効活用する。
(もっと読む)
進行方向加速度推定装置、自動車、進行方向加速度推定方法および車両制御装置
【課題】車両の進行方向加速度をより高精度に推定すること。
【解決手段】自動車1Aは、水平面とほぼ平行な車体フロア面に対し、設定されたピッチ角γだけ前後に傾けられた前後加速度センサ4によって、車両に作用する前後加速度を検出する。そして、制駆動力センサ3FR,3FL,3RR,3RLの検出値の合計と前後加速度センサ4の出力値を用い、(1)式に従って路面傾斜角θを算出する。さらに、その路面傾斜角θを用いて算出した進行方向加速度αの積分値から、車体速vを算出する。したがって、通常の車両走行状態において、(1)式における分母sinγがゼロとなることを防止しつつ、積分を用いることなく路面傾斜角θを推定するため、路面傾斜角θをより高精度に推定できる。さらに、その路面傾斜角θを用いて、進行方向加速度αを算出するため、進行方向加速度αをより高精度に推定することができる。
(もっと読む)
車両用操舵装置
【課題】新たなセンサを追加することなく車両挙動が不安定状態に陥り易い車重の軽い所謂軽自動車や小型車などでも路面摩擦係数が推定可能な車両用操舵装置を提供する。
【解決手段】走行中の車両の路面摩擦係数を推定し、路面摩擦係数に基づいて車両挙動を安定化させる車両用操舵装置であって、走行中の車両のタイヤが路面から受ける路面反力トルクを検出する路面反力トルク検出手段15と、前記路面反力トルクの検出値に基づいて前記車両の路面摩擦係数を推定する車両挙動推定手段17とを備える。
(もっと読む)
発進支援装置
【課題】運転者が従来以上に周囲の状況を容易に認識できる状況とし、安全に駐車区域から車両を発進させることが可能な発進支援装置を提供する。
【解決手段】駐車準備位置から駐車区画に至る駐車軌跡を取得する駐車軌跡取得手段と、駐車軌跡に沿って車両を移動中に、車両周辺の情報を駐車時車両周辺情報として取得する駐車時周辺情報取得手段と、駐車軌跡情報に基づいて、車両を駐車軌跡の逆軌跡を辿って自動走行させることにより、駐車区画からの発進制御を行う自動発進制御手段と、逆軌跡に沿った車両の自動発進中または自動発進の準備中に、車両周辺の情報を発進時車両周辺情報として取得する発進時周辺情報取得手段と、駐車時車両周辺情報と発進時車両周辺情報との比較に基づいて、逆軌跡に沿った自動発進制御が実行ないし継続不能と判定された場合、自動発進制御を抑制するための出力を行う自動発進制御抑制出力手段と、を備えることを特徴とする発進支援装置として提供可能である。
(もっと読む)
車両挙動制御装置
【課題】 車両の絶対的な挙動と、相対的な挙動の両方を適正に制御可能な車両挙動制御装置を提供すること。
【解決手段】 ブレーキペダルとは別に設けられマスタシリンダを作動させてホイルシリンダを加圧する第1の昇圧部と、マスタシリンダを介さずにホイルシリンダを加圧する第2の昇圧部と、昇圧部を制御するコントロールユニットと、を備え、コントロールユニットには、自車両と周囲との相対的な関係に基づく第1の動作指令と、自車両の絶対的な挙動に基づく第2の動作指令とが入力され、入力された指令が第1の動作指令の場合、第1の昇圧部を作動させると共に、入力された指令が第2の動作指令の場合、第2の昇圧部を作動させ、第1の動作指令が入力されて前記第1の昇圧部が作動しているときに第2の動作指令が入力された場合、第1の昇圧部に加え、第2の昇圧部を作動させる。
(もっと読む)
車両用制御装置
【課題】本発明は、路面の状況の変化にかかわらず、常に先行車や障害物との距離を検出して精度の高い先行エリア状態検出制御を行い得る車両用制御装置を実現することを目的としている。
【解決手段】このため、レーダにより車両前方に先行する車両、あるいは障害物があるかどうかを検出する先行エリア状態検出手段と、この先行エリア状態検出手段により検出された先行エリアの状態に応じて車両を制御する車両制御手段とを備えた車両用制御装置において、車両に発生するピッチング量を検出するピッチング量検出手段と、このピッチング量検出手段により検出されたピッチング量に応じて、レーダの照射角を制御する照射角制御手段とを備えている。
(もっと読む)
車両制御システム
【課題】 右左折時における巻き込みの危険を回避し易い車両制御システムを提供する。
【解決手段】 車両制御システム1において、車両20は、道路上で右左折する際に、レーン内側を走行する発信器3から送信される無線識別情報を受信して、発信器3の存在判定を行なう。そして、発信器3が存在すると判定された場合には、自車両20の当該右左折走行を抑制するために加速制限制御ないし自動減速制御を実行する。
(もっと読む)
車輪軸受における反作用力を求める方法
【課題】制動過程においても車輪と道路との間に作用する力を求めることができる方法を提供する。
【解決手段】車輪軸受における合成軸受力を求めるセンサのほかに少なくとも1つの別のセンサにより、制動過程においてキャリパに作用する制動力が求められ、生じる軸受力から、軸受力への制動力の影響が算出される。
(もっと読む)
車両用操舵装置
【課題】雪道などの滑り易い路面で車両挙動が不安定となる状態やその予兆を、格別なセンサを追加せずに検出して、車両挙動検出に基づく車両安定化制御を可能にした車両用操舵装置を得る。
【解決手段】実路面反力トルク検出器15と、モータ角速度検出器13と、車速検出器11と、実路面反力トルク、モータ角速度および車速の各検出値から車両挙動の不安定状態を検出する車両挙動推定手段17とを備えている。車両挙動状態の推定結果Stability(s)に基づき、車両挙動を安定化するためのアシストトルクを付与して、車両挙動を安定化する。
(もっと読む)
単一トラックの自動車両を安定させるための方法および装置
【解決手段】単一トラック車両、特にはオートバイにおける不安定運転状態を安定化するための方法であって、予め特定された運転状態、特別にはブレーキングであって、特に直線路、またはほぼ直線路における運転の間に、(1)車両の少なくとも1つのヨーレート(Ψ)、および/または一側方スリップ角(β)が決定され、(2)その車両の不安定な運転状態の検知のために前記決定されたヨーレート(Ψ)、および/または決定された側方スリップ角(β)が評価され、(3)不安定運転状態が検知されるときは、1つの車輪、特には前輪のブレーキトルクを減少する。また、この発明は、単一トラック車両における不安定運転状態を安定化するための装置に関する。 (もっと読む)
車載用走行環境認識装置
【課題】
より精度の高い車載用画像認識処理装置を提供する。
【解決手段】
車両の外部を撮像する車載カメラ3a,3bからの信号を入力する入力部3と、入力部3で入力した画像信号を処理して外部環境の認識を妨げる要因を有する第1の画像領域を検出する画像処理部16と、画像処理部16によって検出された第1の画像領域の大きさ,位置、または第1の画像領域を有する車載カメラ3a,3bの設置場所の少なくともいずれか一つに基づいて、環境認識処理を行う第2の画像領域を決定する処理画像決定部17と、処理画像決定部17によって決定された第2の画像領域に基づいて車両の外部環境を認識する環境認識部20とを有する車載用走行環境認識装置。
(もっと読む)
運転状態を検知するためのデバイス、及び結合された車両ブレーキ・システムの、駆動状態に依存する運転のための方法
本発明は、2アクセル・モータ車両の運転状態を決定するためのデバイスに係る。その運転状態は、モータ車両の運転状況及び下にある表面の状態から形成され、ここで、車両に搭載されたセンサーからの出力信号が、運転状況を決定するために、評価され、またここで、下にある表面の摩擦の値を決定するためおよび/または評価するためのルーチンが、下にある表面の状態を決定するために、もたらされる。本発明はまた、結合された車両ブレーキ・システムを運転するための方法に係り、特に、フロント・アクセルに油圧により駆動可能なホイール・ブレーキを有し且つリア・アクセルに電気機械的に駆動可能なホイール・ブレーキを有するモータ車両のための方法に係り、ここで、リア・アクセルに割り当てられた車両ホイールが、電動モータにより、少なくとも時折、駆動されることが可能であり、この電動モータは、制動のエネルギーの回復のための発電機として運転されることが可能であり、またこの電動モータは、発電機モードにおいて、リア・アクセルに割り当てられた車両ホイールに制動力を発生させ、またここで、ペダルの行程長センサーが、ドライバーからの制動の要求を決定し、この要求を制御及び調整ユニットに供給し、この制御及び調整ユニットは、油圧的により駆動可能なホイール・ブレーキ、電気機械的に駆動可能なホイール・ブレーキ、及び発電機モードで運転されることが可能な電動モータに対する、制動力の分配を実行する。 (もっと読む)
ピッチレートセンサの信号のずれを求めるための方法と装置
車両(2)のピッチレートセンサの信号のずれ(OFF_SIG)を求めるために、ピッチレートセンサの信号(OMEGA_TETA_SIG)が検出される。車両(2)の長手方向加速度(ACC)が求められる。長手方向加速度(ACC)の時間微分(ACC_DRV)が求められる。長手方向加速度(ACC)の時間微分(ACC_DRV)の絶対値が所定の第1の閾値(THD_1)よりも小さいか否かが求められる。長手方向加速度(ACC)の時間微分(ACC_DRV)の絶対値が所定の第1の閾値(THD_1)よりも小さい場合には、ピッチレートセンサの信号(OMEGA_TETA_SIG)に依存して、ピッチレートセンサの信号のずれ(OFF_SIG)が求められる。  (もっと読む)
(もっと読む)
車両ブレーキシステムのブレーキ係数測定及び予測を行う方法及び装置
本発明は、複数のホイールアクスル(4,5、6、7)を有する牽引車両(2)及びトレーラ(3)を備える車両(1)のブレーキシステムのブレーキ係数(Bf)測定及び予測を行う方法において、該方法は、少なくとも第1ホイールアクスル(4)及び第2ホイールアクスル(5)が関与する制御ブレーキ操作を開始すること、及び前記牽引車両(2)及び前記トレーラ(3)間のブレーキバランスを得るために、制動機能部を備える制御ユニット(13)によって前記第1ホイールアクスル(4)及び前記第2ホイールアクスル(5)についての前記ブレーキ係数(B11;B12)を示す値を得ることを含む方法である。本発明によれば、前記方法は、前記車両(1)の減速が要求されると、前記第1ホイールアクスル(4)を強制的に制動するステップ(17)と、前記第1ホイールアクスル(4)についてブレーキ圧力(Pcy11)及びブレーキトルク(Tbrake1)を決定することによって前記第1ホイールアクスル(4)についてブレーキ係数(B11)を予測するステップ(18)と、その後に前記第2ホイールアクスル(5)を強制的に制動するための移行段階を設けるステップ(19)と、前記第2ホイールアクスル(5)についてブレーキ圧力(Pcy11)及びブレーキトルク(Tbrake2)を決定することにより、前記第2ホイールアクスル(5)についてのブレーキ係数(B12)を予測するステップ(20)とをさらに含む。本発明は、車両ブレーキシステムのブレーキ係数を測定し予測する装置に関する。 (もっと読む)
車両長手方向の瞬時速度を求めるための方法と装置
車両の少なくとも2つの車輪からそれぞれ車輪回転数(RD)が求められる。各車輪回転数(RD)に関して、移動するばらつき度(VAR)がそれぞれ求められる。それぞれの車輪回転数(RD)の目下の信頼度がばらつき度(VAR)に依存して求められる。車両長手方向の瞬時速度が、目下信頼度が高いものとして識別された車輪回転数(RD)に依存して求められるか、目下全ての車輪回転数(RD)が信頼度の低いものとして識別されている場合には、事前に信頼度が高いものとして識別された車輪回転数(RD)に依存する外挿として求められる。  (もっと読む)
(もっと読む)
トラクタにおけるトレーラ運転の検出方法および制御装置
【課題】トラクタがトレーラ運転内に存在しているかどうかを確実に検出可能な、特に走行動特性制御方法の一部としての、改善されたトラクタにおけるトレーラ運転の検出方法を提供する
【解決手段】 本発明は、特にトラクタおよびトレーラからなる連結車を安定化させるためのトレーラ横揺れ論理を有する走行動特性制御装置の一部としての、トラクタにおけるトレーラ運転の検出方法並びに方法を実行するための制御装置において、トレーラ運転の検出が、走行状態を表わす実際信号と、対応の目標信号との比較により行われるように設計される。
(もっと読む)
電子制御式ブレーキシステム及びブレーキ圧制御方法
【課題】原動機付き二輪車の停止状態を維持すること及び/又は原動機付き二輪車の発進を容易にすることが可能な電子制御式ブレーキシステムにおけるブレーキ圧制御方法及び該ブレーキ圧制御方法を実行する電子制御式ブレーキシステムを提供すること。
【解決手段】原動機付き二輪車30の電子制御式ブレーキシステムにおけるブレーキ圧制御方法において、原動機付き二輪車30が停止しているか、又はほぼ停止しており、かつ、所定の作動条件を満たしている場合に、原動機付き二輪車30の転動を防止するために、特に後輪のブレーキ液圧回路である所定のブレーキ液圧回路においてブレーキ圧を増圧し、これを保持する。 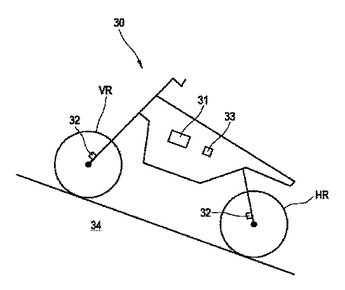 (もっと読む)
(もっと読む)
調整量としてエンジン回転数を用いた車両における駆動輪の駆動スリップ制御方法及びその装置
本発明は車両の駆動輪の駆動スリップを制御するための方法に関している。この方法によれば、車両の駆動エンジン(12)のための調整量が、現下の車輪速度の検出値と車輪目標速度の算出値に基づいて形成される。本発明は、この調整量を駆動エンジン(12)の回転数に対する上方の限界値によって形成している。  (もっと読む)
(もっと読む)
自動車の長手方向の速度を推定する方法
本発明は、2つの駆動輪と少なくとも1つの電子中央処理ユニットとを備えた自動車の長手方向の速度を推定する方法に関し、本方法では、2つの駆動輪を含む4つの車輪の回転速度に基づいて、それら回転速度を降順に順位付けした後、加速段階において、車両の長手方向速度と3番目に速い車輪の速度とを比較し、且つその加速度を最も遅い車輪の加速度以下に抑え、減速段階において、上記長手方向速度と、最も速い車輪の速度とを比較し、且つその加速度の絶対値を2番目に速い車輪の同値以下に抑え、長手方向速度が3番目に速い車輪の速度と最も速い車輪の速度の間に位置するとき、その値を一定に維持する。  (もっと読む)
(もっと読む)
161 - 180 / 185
[ Back to top ]