
Fターム[3D246GA02]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−解決課題 (3,487) | 車両情報、車外情報の推定 (185)
Fターム[3D246GA02]に分類される特許
21 - 40 / 185
車両ずり下がり状態判定装置およびそれを備えた車両制御装置
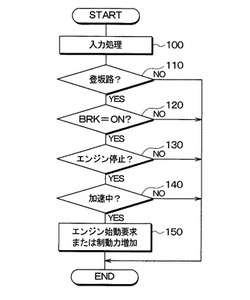
【課題】的確に車両のずり下がり状態を判定することができる車両ずり下がり状態判定装置を提供する。
【解決手段】車両が登坂方向に走行している登坂走行状態において、登坂方向の駆動力が発生しない無駆動力状態とされ、かつ、車輪加速度dVw(つまり車両加速度)が加速方向となったときに、車両ずり下がり状態と判定する。これにより、車両の積載重量の影響を受けることなく、正確に車両ずり下がり状態を判定することが可能となる。そして、このような正確な車両ずり下がり状態の判定結果に基づいて、アイドルストップ制御ではエンジン再始動を行い、坂路保持制御ではブレーキ力を増加させることで、車両ずり下がりを抑制することが可能となる。
(もっと読む)
制動力制御装置

【課題】マスタシリンダ圧センサを必要としない制動力制御装置を提供する。
【解決手段】マスタカット弁41は、磁性体(プランジャ)101と、コイル102と、スプリング103と、を備える。磁性体101は、第1液圧配管38と連結通路43との液圧差に応じた差圧作用力が開弁する方向に作用される。コイル102は、磁性体101が動くことにより、誘導起電力が発生する。誘導起電力は液圧が変化した際、特に運転者がブレーキペダル31を操作した際、コイル102に電磁誘導により電流が流れるようになっている。ブレーキペダル31を操作したことにより発生した電流をブレーキ液圧に換算して制動装置に導入する。これより、ブレーキペダル31によるブレーキ液圧を制動力制御装置に導入することができる。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力及び回避軌道を導出する。
【解決手段】所望の位置、該位置での速度の方向、及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、自車両と所望の位置との距離のx成分Xe、距離のy成分Ye、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力を求めるために導入した第1の導入パラメータη1の特定仮定下での値η1’との関係、第2の導入パラメータη2の特定仮定下での値η2’との関係、第3の導入パラメータη3の特定仮定下での値η3’との関係を定めた低速化3次元マップを用いて、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力を導出する。
(もっと読む)
車両状態量推定装置
【課題】車両の挙動制御時における挙動の急変を抑制することのできる車両状態量推定装置を提供すること。
【解決手段】車両1の挙動制御に用いる目標横加速度Gytを車両1の走行時における横加速度実測値Gysと横加速度推定値Gyeとに基づいて推定する車両状態量推定装置2において、横加速度実測値Gysと横加速度推定値Gyeとに基づいて目標横加速度Gytを推定する場合には、車両1の横滑りの状態に応じて横加速度実測値Gysと横加速度推定値Gyeとに重み付けを行うことにより推定すると共に、横滑りが所定値以上になった場合には横滑りの状態に関わらず横加速度実測値Gysの重み付けが大きい状態を維持し、横加速度実測値Gysと横加速度推定値Gyeとの差が所定値以下の状態が所定時間継続した場合に、横加速度実測値Gysの重み付けが大きい状態を解除する。
(もっと読む)
車両の制御装置
【課題】アクセルとブレーキの両方が踏み込まれた状態になった場合にエンジンの出力を制限する出力制限制御を実行する車両において、道路状況に応じた適正な条件で出力制限制御を実行して、安全性を向上させることができるようにする。
【解決手段】距離センサ35やナビゲーション装置34からの情報に基づいて、前方の車両又は障害物までの距離が所定値以下と判定された場合、次のカーブまでの距離が所定値以下と判定された場合、走行道路の曲率半径が所定値以下と判定された場合、走行道路の下り勾配が所定値以上と判定された場合、次の交差点までの距離が所定値以下と判定された場合のいずれかの場合には、速やかに減速する必要がある道路状況であると判断して、出力制限制御が通常よりも早めに実行されるように出力制限制御の実行条件を変更すると共に、出力制限制御の実行中の車両の減速度を大きくするように制御条件を変更する。
(もっと読む)
走行支援装置
【課題】車両の前進時と後退時とで検知対象とすべき障害物に応じた適切な検知が可能な走行支援装置を提供する。
【解決手段】車両11の前方の障害物を検知するレーダ14と後方の障害物を検知するソナー12とを備え、車両の前進時及び後退時にレーダ14及びソナー12により検知された障害物と車両11との接触を防止するように車両11の走行を制御するPCS ECU20を備えるため、前進時及び後退時の両方で障害物と車両11との接触を防止することが可能となる。また、レーダ14は、ソナー12とは異なる種類のセンサであり、ソナー12よりも車両11から長距離に位置する障害物を検知することが可能であるため、後退時の比較的に低速な速度域と、前進時の比較的に高速な速度域とに応じて、検知対象とすべき障害物と車両11との位置関係に応じた適切な検知が可能となる。
(もっと読む)
車両の状態量計測用制御システム
【課題】駆動輪のみを回転させる台上試験において、従動輪を備える車両の状態量を治具を用いずに簡易に計測することが可能な車両の状態量計測用制御システムを提供する。
【解決手段】備えた車両の状態量計測用制御システム30は、駆動輪である左右前輪の車輪速度を検出する左右前輪速度センサ31a,31b及び従動輪である左右後輪の車輪速度を検出する左右後輪速度センサ31c,31dによって検出された左右前輪の車輪速度及び左右後輪の車輪速度に基づいて、車両を制御するENG−ECU33a,VSA−ECU33b,AHB−ECU33cを備え、ENG−ECU33a,VSA−ECU33b,AHB−ECU33cは、外部端末装置40から台上試験中である旨の信号が入力された場合には、左右後輪の擬似車輪速度を生成し、検出された左右後輪の車輪速度に代えて、生成された左右後輪の擬似車輪速度を左右後輪の車輪速度とする。
(もっと読む)
トルク異常検知装置および輸送機器
【課題】動力源に掛かる負荷トルクの異常を検知可能なトルク異常検知装置および輸送機器を提供することである。
【解決手段】トルク異常検知装置10は、動力源に掛かる負荷トルクを推定する負荷トルク推定手段12と、動力伝達手段30,30a,50,55によってシステム外部60との動力の伝達を切断する状態で、負荷トルク推定手段12によって推定される負荷トルクに基づいて動力源に掛かる負荷トルクの異常を検知する負荷トルク異常検知手段13とを有する。システム外部60との間で動力の伝達が切断されるので、システム外部60の変動や変化等による影響を受けない。よって、負荷トルクを精度良く推定でき、負荷トルク異常検知手段13は何らかの故障等が起きたことを的確に検知できる。
(もっと読む)
ブレーキ制御装置
【課題】モータ回転数の推定誤差を低減することができる装置を提供すること。
【解決手段】モータMの端子間電圧VmotとモータMの特性に基づいてモータMの回転数を推定するモータ回転数推定部4を有するコントロールユニットCPUを備えた。ブレーキ回路内のブレーキ液を流動させるポンプPを回転駆動するモータMの回転数ωを推定する際、モータ端子間電圧VmotとモータMの特性(イナーシャIや容積効率η等の諸元、及びトルク−回転数特性)に基づいて推定する。
(もっと読む)
車両制御装置および車両制御方法
【課題】ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑える。
【解決手段】ピッチング現象による車両10の姿勢変化分に応じたピッチング補正値を算出する。このピッチング補正値と、機関ECU31により算出される内燃機関11の出力トルクと、加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。
(もっと読む)
制動履歴データベース作成装置及び作成方法
【課題】車両における省燃費運転の精度を向上すること。
【解決手段】車両の位置情報を取得する位置情報取得部11と、車両の制動装置が作動していることを判定する制動判定部12と、を備え、位置情報取得部11が取得した位置情報とともに制動装置の制動履歴が格納されるデータベース21を作成する。制動履歴取得部15は、位置情報取得部11が取得した車両の位置情報に基づいて当該車両の進路上にある制動履歴などのデータをデータベース21から取得する。
(もっと読む)
情報処理装置
【課題】道路の勾配を考慮した運転支援を行う。
【解決手段】情報処理装置1Aは、運転者による減速行動を検出する減速行動検出部21と、走行している道路の勾配情報を取得する勾配情報取得部22と、勾配情報を学習する勾配情報学習部23と、を備え、勾配情報学習部23は、減速行動検出部21により減速行動を検出した場合、所定の間、勾配情報取得部22により取得された勾配情報を学習する。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御よって旋回内輪の前後力が低減されることに起因して運転者が走行阻害感の如き不満を感じる虞れを低減する。
【解決手段】旋回内輪の前後力を低減することにより旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御を行う車両の走行制御装置。車輪の駆動力により車両を駆動することの困難性が高いときには該困難性が低いときに比して旋回内輪の前後力の低減が開始され難くし、また旋回内輪の前後力の低減量を小さくする。上記困難性は車輪の駆動力による車輪の移動に対する抵抗及び車輪から路面への駆動力の伝達のし難さの少なくとも一方を含み、例えば車両の実際の加速度と運転者の駆動操作量に基づく車両の規範加速度との偏差に基づいて判定される。
(もっと読む)
ブレーキ制御装置
【課題】左右のブレーキ装置のブレーキドラムとブレーキシューとのクリアランスが異なる場合にもブレーキ作動時に車両を安定させるブレーキ制御装置を構成する。
【解決手段】直進状態で運転者によるブレーキ操作により停車した際のヨーレートからクリアランス左右差取得手段34が左右のブレーキ装置のクリアランスの左右差に相当するクリアランス値CLEを取得し、記憶手段35が記憶する。次に、閾値設定手段36がクリアランス値CLEからブレーキ装置の自動操作を開始する閾値を設定する。車両を旋回させる場合には旋回安定化制御部31が、旋回外側のブレーキ装置に設定された閾値まで横加速度センサ22の検出信号Gyが達したタイミングでブレーキ装置の自動作動を開始する。
(もっと読む)
車両用情報処理装置および車両制御装置
【課題】車輪の滑りによる車両の挙動を精度よく判定することができる車両用情報処理装置および車両制御装置を提供すること。
【解決手段】車両100のヨーレートを検出するヨーレート検出部38によって検出されたヨーレートの向きに基づいて、車両の車輪の滑りによる車両の挙動を判定する車両用情報処理装置1、および車両用情報処理装置を備える車両制御装置1−1。車両用情報処理装置は、例えば、ヨーレートの向きが所定時間変化しない場合に上記挙動が生じていると判定する。
(もっと読む)
表示処理装置及び信号供給装置
【課題】外部の装置の停止状態の種別に応じた表示が可能な表示処理装置等を提供する。
【解決手段】表示処理装置は、外部の装置の状態を表す信号を受信する信号受信手段と、前記信号受信手段が受信した前記信号に応じた表示態様の表示を表示部に行わせる表示処理手段と、を備え、前記信号は、正常な停止状態を表す正常停止信号、又は、異常による停止状態を表す異常停止信号であることを含み、前記表示処理手段は、前記信号が、前記正常停止信号であるか、前記異常停止信号であるかで、前記表示態様を異ならせる。
(もっと読む)
車両用挙動制御装置
【課題】カーブ進入時だけでなくカーブ内においてもドライバの危険感に合った減速制御を実行することができる車両用挙動制御装置を提供する。
【解決手段】自車がカーブ内に位置すると判定した場合には、減速制御において、接近離間状態評価指標KdBに基づいた第1修正目標相対速度算出式を適正道路境界距離とカーブ内適性道路境界距離との差分をもとに修正した第2修正目標相対速度算出式を用いて第2修正目標相対速度を算出する。
(もっと読む)
車両の走行装置の状態を評価するための方法と装置、車両に対するカーブ警告方法ならびにコンピュータプログラム製品
【課題】より効率的に車両の走行装置の状態を評価する。
【解決手段】ブレーキ制御システムの少なくとも1つの制御信号と、走行データを検出するための手段の出力信号とを結合し、結合信号を取得し、結合信号に基づき走行装置の状態を評価する。
(もっと読む)
車両の制動制御装置
【課題】 車両の旋回挙動を安定して制御可能な車両の制動制御装置を提供する。
【解決手段】 コントロールユニット3は、車両のアンダーステア傾向を抑制するヨーモーメントを車両に付加すべく車両の旋回内輪の前後輪を制御対象輪として制動力を付与する制動力制御手段(前後目標ヨーモーメント算出部23、各輪目標制動力算出部24および液圧制御装置4)と、操舵速度dθを検出する操舵速度検出手段と、操舵速度dθが高いほどフロントヨーモーメント配分を大きくするヨーモーメント配分算出部22と、を備える。
(もっと読む)
車両制御装置
【課題】車車間通信によって先行車の走行情報を取得しながら行う自車の走行制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の前方を走行する先行車100の車車間通信情報を取得し、取得した先行車100の車車間通信情報に基づいて自車1の走行状態を制御する車両制御を行う車両制御装置であって、車両制御時のパラメータに応じて、車車間通信の制御を変化させる。これにより、車車間通信の制御の状態に応じて自車1の走行制御の形態を切替える頻度を低減させることができる。この結果、車車間通信によって先行車100の走行情報を取得しながら行う自車1の走行制御を、より適切に行うことができる。
(もっと読む)
21 - 40 / 185
[ Back to top ]