
Fターム[3D246GB21]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御機能 (5,653) | 路面状況対応 (331) | 路面傾斜 (147)
Fターム[3D246GB21]の下位に属するFターム
Fターム[3D246GB21]に分類される特許
1 - 20 / 48
エンジン再始動制御装置
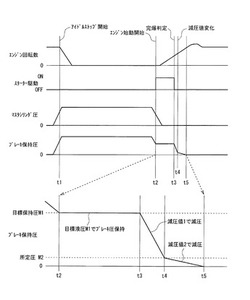
【課題】車両のエンジンの再始動に際してブレーキペダルの操作が解除された後もエンジンの再始動が完了するまではブレーキ圧を保持する場合に、車両の飛び出し感及びブレーキの引きずり感の防止を図ることである。
【解決手段】時刻t3のブレーキ保持圧は所定圧M2より大きいので、減圧値1を用いてブレーキ保持圧を減圧していく。その後、時刻t4では、ブレーキ保持圧が所定圧M2まで低下したので、減圧値2を用いてブレーキ保持圧を減圧していく。よって、時刻t3〜t4に比べて時刻t4以後はブレーキ保持圧の減圧速度が緩やかになる。
(もっと読む)
ブレーキ装置

【課題】車両の駐車場所がスプリットμ路面であるか否かを判定できるブレーキ装置を提供する。
【解決手段】ディスクブレーキ21を構成する取付部材に歪センサ37を設ける。歪センサ37は、取付部材の歪に基づいて、ディスクブレーキ21のブレーキ力を検出する。駐車ブレーキ用コントローラ38は、駐車ブレーキの作動時に、左側の後輪3のディスクブレーキ21のブレーキ力と左側の後輪3のディスクブレーキ21のブレーキ力とを比較し、これら左,右のブレーキ力Bに差がある場合に、左側の後輪3と右側の後輪3とがスプリットμ路面の勾配路に駐車されていると判定する。
(もっと読む)
発進補助装置およびこれを搭載した発進補助車両
【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
車両用ブレーキ制御装置
【課題】EPBによる制動力によって車両のずり下がりを防止しつつ、過剰な制動力を発生させなくても済むようにする。
【解決手段】車速が0になって車両が停止したときに、ピッチングによりGセンサ21のGセンサ値が変動しても、その変動波形の振幅のーク値に沿って目標制動力が更新されるようにしている。これにより、Gセンサ値に基づいて設定される目標制動力をより路面勾配に対応する値に近づけることが可能となる。このため、EPBによる制動力によって車両のずり下がりを防止しつつ、過剰な制動力を発生させなくても済むようにできる。
(もっと読む)
手動変速機付車両の坂道発進補助制御装置
【課題】シフトポジションセンサを用いることなく坂道でエンストした手動変速機付車両のずり下がりを抑制して運転者によるブレーキ操作や再始動操作を容易化することができる手動変速機付車両の坂道発進補助制御装置を提供すること。
【解決手段】坂道で停車した手動変速機付車両(MT車)のずり下がりが検知されると加圧ポンプを駆動してブレーキ液圧を車輪4L,4R,5L,5Rのブレーキ装置16に供給する坂道発進補助制御装置(ECU)13において、所定の勾配以上の坂道でMT車のブレーキペダル8の踏み込みによる停車が検知された後、ブレーキペダル8の踏み込みが解除され、アクセルペダル9の踏み込みが検知されて車速が所定値以上となった時点でエンジン回転数が所定値以下であるときには、加圧ポンプを駆動してブレーキ液圧をブレーキ装置16に供給してブレーキ力を発生させる。
(もっと読む)
路面勾配推定装置、車両用制御装置、及び車両用制御システム
【課題】車両の走行速度(実車速V)の微分値ACCw及び自身に加わる力に基づき加速度を感知する加速度センサの検出値ACCgに基づき、車両の走行する路面の勾配を高精度に推定することが困難なこと。
【解決手段】微分値ACCw及び検出値ACCgの差として、第1推定値ACCrgが算出され、これに所定の補正がなされることで第2推定値ACCrgpが算出される。第2推定値ACCrgpにローパスフィルタB48にてフィルタ処理を施すことで、勾配推定値ACCrgfが算出される。第1推定値ACCrgと、ローパスフィルタB50によりこれにフィルタ処理を施した遅延推定値ACCrgLとの差に基づき、勾配変化推定値Δを算出する。ローパスフィルタB48のカットオフ周波数fcは、上記勾配変化推定値Δに応じて可変設定される。
(もっと読む)
車両の制御装置及び制御方法
【課題】エンジンの自動停止、自動再始動を行う車両において、停車維持制御を行うべき時期とエンジンの再始動を行わせるべき時期とが少なくとも一部重なった場合でも、運転者の発進意思を尊重しつつエンジンの再始動と制動力の増加とを有効に両立させることができる車両の制御装置及び制御方法を提供する。
【解決手段】エンジン停止中の車両ずり下がり防止制御において、運転者の発進意思ありと判定された場合(S15で肯定判定)は、エンジンの再始動を開始させた(S16)後、使用できる電力以下で制御目標圧までブレーキ加圧を行う(S18)。一方、運転者の発進意思なしと判定された場合(S15で肯定判定)は、制御目標圧までブレーキ加圧を行った(S22)後、エンジンの再始動を開始させる(S23)。
(もっと読む)
車両の制動制御装置、車両の制御装置及び車両の制動制御方法
【課題】車両を停車させる場合に車輪に対する制動力を小さくするブレーキ操作を運転手が行ったとしても、運転手の意図しない車両の移動を抑制することができる車両の制動制御装置、車両の制御装置及び車両の制動制御方法を提供する。
【解決手段】ブレーキ用ECUは、車輪に対する制動力を小さくするブレーキ操作が運転手によって行われた場合において、マスタシリンダ内のMC圧Pmcが、路面の勾配に応じた値に設定された勾配相当MC圧Pmctha以下になった第2のタイミングt12で、車輪に対する制動力を保持する第1制動制御を開始し、その後、路面の勾配が急勾配側に変化した場合に、車輪に対する制動力を増大させる第2制動制御を開始する(第3のタイミングt13)。
(もっと読む)
車両の制御装置及び車両の制御方法
【課題】運転手によるブレーキ操作量又はマスタシリンダ内の流体圧を検出するためのセンサを用いなくても、車両のエンジンを自動的に停止させるタイミングを設定することができる。
【解決手段】ブレーキ用ECUは、加速度センサからの検出信号に基づき車体加速度Gを演算し、該車体加速度Gに基づきマスタシリンダ内のMC圧Pmcに対応するMC圧加速度Amcを演算する。また、ブレーキ用ECUは、路面の勾配に対応する勾配加速度Agを演算する。そして、ブレーキ用ECUは、MC圧加速度Amcの絶対値が勾配加速度Agの絶対値以上となった場合に、エンジンの自動的な停止を許可する停止制御を行う(第3のタイミングt13)。
(もっと読む)
走行装置
【課題】坂道登坂時に、車両が後退することを確実に防止し、安定した坂道停車及び坂道発進を実現することのできる走行装置を提供すること。
【解決手段】逆入力遮断クラッチ(32)により高速走行用駆動ユニット(16)及び高トルク走行用駆動ユニット(18)による走行を切替可能なクローラ走行装置(8)を備えたクローラロボット(1)において、坂道停車時に逆入力遮断クラッチが遮断状態となった場合(S1〜S3)、ブレーキ(26)を作動させてクローラロボットを停止させ(S4〜S6)、発進時には逆入力遮断クラッチが接続状態になったことを確認した後にブレーキを解除する(S7〜S9)。
(もっと読む)
車両運動制御装置
【課題】加減速が不要なシーンで、横運動に連係した前後加速度制御の介入を抑制し、走行シーンに対するロバスト性を向上させることができる車両運動制御装置を得ること。
【解決手段】自車両情報取得手段1により検出したドライバ入力情報等に基づいて車輪制駆動トルクアクチュエータ3やブレーキランプ4を制御する車両運動制御演算手段2は、車両に横運動を発生させる操舵操作情報、もしくは車両に発生した横運動情報の少なくとも一つに基づいて車両に発生させる前後加速度指令値を演算する前後加速度指令値演算部7と、前記操舵操作情報および前記横運動情報に基づいて前記前後加速度指令値を補正する前後加速度指令値補正演算部8を備える。
(もっと読む)
連結車両の挙動制御装置
【課題】スウェイ状態抑制のためのアンチヨーモーメントの生成を制動力配分制御により実行する挙動制御装置であって、アンチヨーモーメントの生成時に車両の減速が為されないようにして、運転者の違和感や後続車両への影響が回避できるようになった挙動制御装置を提供すること。
【解決手段】本発明の連結車両のスウェイ状態を抑制するための挙動制御装置は、スウェイ状態の発生時に各輪の制動力配分制御によりスウェイ状態を抑制するヨーモーメントを発生すると伴に、制動力配分制御によって各輪に生ずる制動力による車両の減速量に基づいて決定される駆動力を車両の駆動輪に付与することを特徴とする。
(もっと読む)
車両制御装置
【課題】 スムーズな発進を行うことができる車両制御装置を提供する。
【解決手段】 ドライバのブレーキペダル操作無しでもホイルシリンダ液圧を保持し所定の条件が成立したときに液圧を減圧するブレーキCUと、エンジン32の駆動力を前輪FL,FRと後輪RL,RRとに対して任意の割合で配分可能な4WDカップリング39と、所定の条件が成立したとき、後輪RL,RRへの駆動力配分量を増加させる駆動力配分変更部33cと、を備えた。
(もっと読む)
電気ブレーキ装置
【課題】 時々により変化する車両の状況に拘わらず、前輪・後輪の制動トルクの配分を的確に制御して最適な制動トルクを得る。
【解決手段】 車両重量の状態、勾配路面の状態、旋回走行状態に応じて設定されたモータ駆動電流MIが電気ブレーキ駆動手段から各輪の電動モータ4に出力され、ブレーキパッド2をブレーキロータ1に接触させて、各輪の目標制動トルクに追従した的確な制動トルクを得る。
(もっと読む)
車両用勾配推定装置および車両用走行制御装置
【課題】走行路の路面勾配の推定精度を向上させ、路面勾配の推定結果に応じて適切な走行制御を行なう。
【解決手段】車両用勾配推定装置10aは、車速を検出する車速センサ21と、車速センサ21により検出された車速に基づいて車両の車体加速度を算出する車体加速度算出部31と、エンジン負荷減速度およびクリープトルクによる加速度などからなる加速度補正量を算出する加速度補正量算出部32と、車体加速度を加速度補正量により補正する加速度補正部33と、ブレーキ液圧を検出するブレーキ液圧センサ23と、車速が車両のほぼ停止状態を示す所定値以下となった場合に、加速度補正部33により算出された加速度(つまり、ブレーキの作動に起因した減速度)とブレーキ液圧との比に基づいて走行路の勾配を推定する第1勾配推定部36とを備えて構成される。
(もっと読む)
制動力制御装置
【課題】制動力の制御の精度を向上させることができる制動力制御装置を提供する。
【解決手段】車両に作用させる制動力を制御する制動力制御装置であって、車両に作用させる駆動力Fdriveを取得する駆動力取得手段と、駆動力取得手段により取得された駆動力Fdriveに基づいて制動力を推定する制動力推定手段とを備えることで、駆動力Fdriveと制動力との釣り合い点を意図的に生成することができるので、ブレーキアクチュエータの製造ばらつきや経年劣化等を含めた正確な制動力を推定することが可能となる。
(もっと読む)
制動制御装置
【課題】電動パーキングブレーキの誤作動を防止しつつ安定したヒルホールド機能を確保できる制動制御装置を提供する。
【解決手段】制動制御装置を、車両の停車を判定する停車判定手段31,61と、路面の傾斜を判定する傾斜判定手段62と、路面の傾斜を前記停車判定手段よりも短時間で簡易判定する簡易傾斜判定手段32と、ドライバによるブレーキ操作を検出するブレーキ操作検出手段73と、停車判定手段による停車判定及び簡易傾斜判定手段による簡易傾斜判定がともに成立し、かつ、ブレーキ操作検出手段がブレーキ操作を検出した場合に液圧式ブレーキの液圧を保持する液圧保持制御手段30と、停車判定手段による停車判定及び傾斜判定手段による傾斜判定がともに成立し、かつ、ブレーキ操作検出手段がブレーキ操作を検出し又は液圧保持制御手段が液圧を保持している場合に電動パーキングブレーキを解除状態から制動状態へ移行させる電動パーキングブレーキ制御手段60とを備える構成とする。
(もっと読む)
姿勢安定化制御装置及び該姿勢安定化制御装置を備えた車両
【課題】姿勢制御機能を有する車両の、悪路での乗り心地を改善する。
【解決手段】姿勢制御用のコントローラ103は、センサ群102から供給される路面状況に基づいて、車両の運動及び姿勢を制御するアクチュエータ131〜139の制御量を制御し、路面が悪路になると、姿勢制御のゲインを下げ、トルクを増加させることにより、サスペンションによらず、乗り心地を改善する。悪路の判定は、単位時間あたりの加速度の変動回数の検出、車輪の乗り上げの検出などにより行う。
(もっと読む)
姿勢安定化制御装置及び該姿勢安定化制御装置を備えた車両
【課題】車両の運動状態を動的にモニタし、安定した制御を可能とする。
【解決手段】コントローラ103は、車両の運動の目標値を設定する目標値演算部212,213と目標値に基づいて、車両の運動及び姿勢を制御するアクチュエータの制御量を制御する制御信号を生成する制御量演算部216,217と、車両の運転状態を検出する運転状態検出部と、目標値に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する目標安定余裕度演算部218と、車両の運転状態に基づいて、車両の転倒安定余裕度を求め、該安定余裕度に基づいて、車両を安定化させるための補正量を演算する実安定余裕度演算部219と、生成された制御量を、補正量を用いて補正する調停処理部222と、補正された制御量を用いて、アクチュエータを制御する駆動部と、を備える。
(もっと読む)
走行制御装置及び走行制御プログラム
【課題】車両の走行状況に応じて適切に走行制御を再開する。
【解決手段】目標車軸トルク生成部52は、車速維持演算部51により演算された目標加速度を実現するための目標車軸トルクとして、車両の走行に対する走行抵抗を加味したフィードフォワード成分が含まれた目標車軸トルクを算出する。制動調停部58は、目標車軸トルク生成部52から入力される目標車軸トルクと、ブレーキドライバモデル57により演算された運転者のブレーキ操作量に対応する要求制動車軸トルクのうち、減速量が大きい方のトルクを選択して制動要求トルク実現部59へ出力する。また、要求制動車軸トルクが目標車軸トルクを上回っている(減速量が大きい)状態では、ブレーキオーバライド信号をFBトルク演算部62へ出力する。制動要求トルク実現部59は、制動調停部58から入力した車軸トルクを実現するための制御信号をブレーキECU40へ出力する。
(もっと読む)
1 - 20 / 48
[ Back to top ]