
Fターム[3D246GC16]の内容
ブレーキシステム(制動力調整) (55,256) | 目的、効果−制御時期 (1,667) | 自動ブレーキ時 (520)
Fターム[3D246GC16]に分類される特許
81 - 100 / 520
アーティキュレート車両における小旋回制御装置
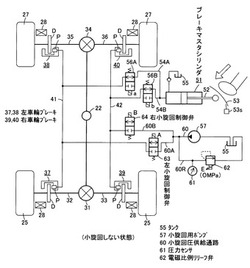
【課題】簡単な構成のブレーキ圧発生回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを起動することで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、旋回内側に対応する左小旋回制御弁63または右小旋回制御弁64の一方を弁開状態に制御する。これらの制御弁63または64の一方を経て、小旋回用ポンプ57から吐出して小旋回圧供給通路60に供給するブレーキ圧油を、電磁比例リリーフ弁62によって無負荷状態から設定圧までの範囲内でアーティキュレート角に応じた圧に制御し、旋回内輪側に対応する左ブレーキ回路41または右ブレーキ回路42の一方に供給する。
(もっと読む)
車両制御装置

【課題】複数種類の走行制御による所定区間の相互に異なる分割要求に対して、記憶容量の制限を考慮しつつ適切に所定区間を分割することができる車両制御装置を提供する。
【解決手段】複数種類の走行制御による前記リンクの相互に異なる分割要求に対して、前記リンクが分割された分割区間毎に前記走行負荷情報を記憶する為のメモリ部82の記憶容量が不足する場合に、分割調停部84によりその異なる分割要求が取捨選択されてその異なる分割要求が調停されるので、メモリ部82の記憶容量の制限を考慮しつつ適切にそのリンクを分割することができる。
(もっと読む)
車両用ブレーキ装置
【課題】中入力荷重領域から高入力荷重領域にかけて弾性体のばね定数を増加させ得るようにして,操作ストロークが適度に得られるストロークシミュレータを備えた車両用ブレーキ装置を提供する。
【解決手段】ガイド軸43に,小径軸部43aと,この小径軸部43aに第1の段部43cを介して連なる大径軸部43bとを設け,弾性体44を,小径軸部43aを囲繞する厚肉筒部44aと,それの前端に連なり,大径軸部43bを囲繞する薄肉筒部44bとで構成し,薄肉筒部44bの内周面を,厚肉筒部44aの内周面より大径に形成すると共に,両筒部44a,44bの両内周面間には,第1の段部43cと軸方向で対向する第2の段部44cを形成し,弾性体44の軸方向圧縮変形時,薄肉筒部44b及び厚肉筒部44aが,その順で制御ピストン21内周面とガイド軸43外周面との間に充填されるようにした。
(もっと読む)
車両用制御装置
【課題】アイドルストップ制御が行われるマニュアル車において、ドライバに発車意思が無いにもかかわらずエンジン10の再始動処理が行われる状況下、クラッチ装置30の操作状態がクラッチミート状態にされることで、車両が意図せぬタイミングで動き出すおそれがあること。
【解決手段】再始動条件が成立したと判断された場合、ブレーキ油圧を上昇させるべくブレーキアクチュエータ48を通電操作するブレーキ強制加圧処理を開始し、油圧センサ50によって検出されるブレーキ油圧が規定圧以上になると判断されるまでエンジン10の再始動処理を禁止する。そしてその後、ドライバによってアクセルペダル58の踏み込み操作がなされると判断された場合、ブレーキ強制加圧処理を停止させて車輪に制動力が付与されないようにする。
(もっと読む)
運転支援装置、運転支援方法、及び運転支援システム
【課題】後続車両の運転者が脇見運転している場合において、車両同士の衝突を抑制する技術を提供する。
【解決手段】車両内に設けられ、該車両の運転支援を行う運転支援装置であって、前記車両の前方車両又は前記車両の後続車両との衝突が予測される場合に前記車両の速度を自動制御する速度自動制御部と、前記後続車両の運転者の向きに関する情報を取得する情報取得部と、前記情報取得部で取得された前記後続車両の運転者の向きに関する情報から、前記後続車両の運転者がよそ見をしているか否かを判断するよそ見判断部と、前記よそ見判断部が前記後続車両の運転者がよそ見をしていると判断した場合、前記後続車両からの追突を抑制するよう、前記自動制御の制御内容を変更する制御内容変更部と、を備える。
(もっと読む)
ブレーキ制御装置
【課題】左右のブレーキ装置のブレーキドラムとブレーキシューとのクリアランスが異なる場合にもブレーキ作動時に車両を安定させるブレーキ制御装置を構成する。
【解決手段】直進状態で運転者によるブレーキ操作により停車した際のヨーレートからクリアランス左右差取得手段34が左右のブレーキ装置のクリアランスの左右差に相当するクリアランス値CLEを取得し、記憶手段35が記憶する。次に、閾値設定手段36がクリアランス値CLEからブレーキ装置の自動操作を開始する閾値を設定する。車両を旋回させる場合には旋回安定化制御部31が、旋回外側のブレーキ装置に設定された閾値まで横加速度センサ22の検出信号Gyが達したタイミングでブレーキ装置の自動作動を開始する。
(もっと読む)
車両の運転支援装置
【課題】たとえ車両に大きなピッチング運動が生じて、制御対象を見失うような状況や、前方情報を大きく補正すべき状況が生じたとしても、可能な限り安定した精度で、レスポンス良く、前方の制御対象との衝突を回避する自動ブレーキ制御を安定して実行する。
【解決手段】ピッチング角θpが予め設定する閾値θpcより大きい場合は、少なくとも前回検出した制御対象の走行情報に基づいて制御対象と自車両1との衝突可能性を判定し、制御対象と自車両1との衝突可能性が有ることが判定された場合に自動ブレーキの介入による制動制御を行う。
(もっと読む)
衝突被害軽減装置
【課題】車両が障害物に衝突するおそれがある場合にブレーキを自動的に作動させる衝突被害軽減装置の作動精度を向上すること。
【解決手段】車両1が進行方向上の障害物に衝突するおそれがあると判定した場合に、車両1のブレーキ2を自動的に作動させる衝突被害軽減装置100であって、車両1の進行方向の画像を撮像するカメラ10と、カメラ10によって撮像され画像から車両1が走行車線を逸脱するか否かを判定する車線逸脱判定部42とを備え、車線逸脱判定部42によって車両1が走行車線を逸脱すると判定された場合には、ブレーキ2の自動的な作動を停止することを特徴とする。
(もっと読む)
車両の統合制御装置
【課題】スプリットμ路を素早く検出し、適切なタイミングで車両の制御を実行する。
【解決手段】メイン制御部1で、左右のCCDカメラ1aにより得られた撮像画像を基に前方走行路がスプリットμ路であるいか否か判定し、前方走行路がスプリットμ路と判定された場合、衝突防止制御部2で設定するブレーキ介入距離を補正するブレーキ介入距離補正ゲインGBRを増加補正して、衝突防止制御部2は、このブレーキ介入距離補正ゲインGBRで補正したブレーキ介入距離を用いて通常より早いブレーキタイミングで衝突防止制御を行う。一方、前方走行路がスプリットμ路と判定された場合、エンジン制御部3で設定する目標トルクTtを補正する目標トルク補正ゲインGTを減少補正して発生する駆動力により、左右で異なった路面μによって車両にヨーモーメントが発生して車両が不安定になることを防止する。
(もっと読む)
車両制御システム、車両制御装置、及び、車両制御方法
【課題】隣接車線から接近する物体に対する車両制御を行う技術を提供する。
【解決手段】車両の走行する車線に存在する物体を制御対象として物体と車両との車両進行方向の距離を一定の距離に保つように車両を制御して、車両が走行する車線と車線に隣接する隣接車線との境界を検出する。そして、車両の前方に存在する物体を検出し、車両が制御されている場合に検出された物体が境界を含む境界近傍の領域に存在するときは、物体を前記制御対象に含む処理を行う。これにより、車両が自車線を走行する物体を制御対象としている場合に、境界を含む境界近傍の領域に存在する物体と車両との衝突の危険性をなくすことができる。
(もっと読む)
差動制限機構の制御装置
【課題】要求されるLSD(差動制限機構)の作動と、LSDの作動により生じる操舵反力変化に起因して発生する操舵違和感の抑制とをバランスさせることができるようにした、差動制限機構の制御装置を提供する。
【解決手段】車両の左右輪の差動を制限する差動制限機構5と、差動制限機構5を制御する制御手段10とを有する車両において、車両の操舵角を検出する操舵角検出手段8aと、車両の操舵トルクを検出する操舵トルク検出手段9と、を有し、制御手段10は、操舵角検出手段8aにより検出した操舵角の方向と、操舵トルク検出手段9により検出した操舵トルクの方向とが異なった際に、差動制限機構5の制御量を減少させる。
(もっと読む)
ブレーキ制御装置
【課題】車両の状態に応じたブレーキアシストが可能なブレーキ制御装置を提供すること。
【解決手段】本発明のブレーキ制御装置では、横加速度とヨーレイトとに基づいて各輪に対する制動力の配分量を算出する第1制動力配分算出部と、ロール挙動に基づいて各輪に対する制動力の配分量を算出する第2制動力配分算出部と、車両挙動に応じて前記第1制動力配分算出部による配分量と、前記第2制動力配分算出部による配分量とを選択して制動力配分制御を行うこととした。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
走行支援装置
【課題】車両の前方の検出領域において、車両の進路に向かって横方向から検出領域に進入した物体を極力速く検出して警報を指令するとともに、誤検出を考慮して不適切な衝突回避の実行を防止する走行支援装置を提供する。
【解決手段】走行支援装置は、検出領域の外部から検出領域に、車両の進路に向かって横方向から進入した物体の横移動速度が所定速度以上であり、かつ物体と車両との距離が所定距離以下である場合(S402:Yes)、検出領域の範囲内で通常警報領域の側方に通常警報領域よりも横方向に広がる拡張警報領域を設定する(S408)。車両支援装置は、通常警報領域の外部の拡張警報領域の範囲内であれば(S410:No)、運転者によりブレーキ操作およびステアリング操作がなされておらず、車両と物体との衝突予測時間が所定の警報時間以下の場合(S412:Yes)、運転者に対する警報だけを車両制御ECUに指令する(S414)。
(もっと読む)
車両用挙動制御装置
【課題】カーブ進入時だけでなくカーブ内においてもドライバの危険感に合った減速制御を実行することができる車両用挙動制御装置を提供する。
【解決手段】自車がカーブ内に位置すると判定した場合には、減速制御において、接近離間状態評価指標KdBに基づいた第1修正目標相対速度算出式を適正道路境界距離とカーブ内適性道路境界距離との差分をもとに修正した第2修正目標相対速度算出式を用いて第2修正目標相対速度を算出する。
(もっと読む)
車両制御装置
【課題】追従走行時における車間制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の走行方向の前方を走行する先行車100の走行情報を取得し、取得した走行情報に基づいて先行車100に追従する追従走行制御を行う車両制御装置2であって、追従走行制御時には、先行車100の加減速制御の開始時点から、先行車100の加減速制御の開始を走行情報に基づいて自車1が検出するまでの検出遅れ時間と、自車1が加減速制御信号を送信した時点から自車1が加減速制御を開始するまでの制御応答遅れ時間と、の和以上で先行車100と自車1との車間時間を設定し、且つ、自車1の走行時の環境または走行状況の少なくともいずれか一方に応じて検出遅れ時間または制御応答遅れ時間の少なくともいずれか一方を変更する。
(もっと読む)
車両制御装置
【課題】車車間通信によって先行車の走行情報を取得しながら行う自車の走行制御を、より適切に行うことのできる車両制御装置を提供すること。
【解決手段】自車1の前方を走行する先行車100の車車間通信情報を取得し、取得した先行車100の車車間通信情報に基づいて自車1の走行状態を制御する車両制御を行う車両制御装置であって、車両制御時のパラメータに応じて、車車間通信の制御を変化させる。これにより、車車間通信の制御の状態に応じて自車1の走行制御の形態を切替える頻度を低減させることができる。この結果、車車間通信によって先行車100の走行情報を取得しながら行う自車1の走行制御を、より適切に行うことができる。
(もっと読む)
車両制御装置
【課題】車線逸脱防止制御が終了したときであっても、自車両の走行路外への逸脱を抑制する。
【解決手段】車線逸脱判断部14によって車線逸脱傾向が有ると判定された場合に、ヨーモーメント指令値算出部15によって車線逸脱防止ヨーモーメント及び路外逸脱防止ヨーモーメントを演算し、車線逸脱防止ヨーモーメントを付与する。車線逸脱防止制御終了判断部16は、車線逸脱防止ヨーモーメントの付与開始から所定時間を経過した場合、自車両の運転者によって運転操作の入力が有った場合、又は、自車両のヨー角が所定値以下となった場合の何れかの場合に、当該車線逸脱防止ヨーモーメントの付与を終了する。ヨーモーメント指令値補正部17は、車線逸脱防止ヨーモーメントの付与を終了した時刻から、路外逸脱傾向が有ると判断した時刻までの時間が長いほど、路外逸脱防止ヨーモーメントを小さく補正する。
(もっと読む)
車両制御システム
【課題】車両の制御における制御目標を適切なものとすることができる車両制御システムを提供すること。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
(もっと読む)
操舵力制御装置
【課題】車両姿勢が不安定になる状況下での車両の加速時あるいは発進時において、簡素な構成で適切な操舵補助力を付加でき、ハンドル取られなどの発生しない車両の安定性向上を図れる操舵力制御装置を提供する。
【解決手段】μスプリット路面上での車両発進時あるいは車両加速時において、左前輪または右前輪が空転したときの車両姿勢が不安定になる状況に対し、車両発進時あるいは車両加速時の車輪速センサにより検出した左前輪の車輪速と、車輪速センサにより検出した右前輪の車輪速と、左前輪と右前輪との車輪速差の変化率とをもとに、適切な操舵補助力を付加し、簡素な構成でコストの増加を招くことなく、μスプリット路面上での車両の発進時あるいは加速時におけるハンドル取られなどを回避して車両の安定性向上を図る。
(もっと読む)
81 - 100 / 520
[ Back to top ]