
Fターム[3D246HA28]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 推進用モータ状態 (72)
Fターム[3D246HA28]に分類される特許
21 - 40 / 72
電気自動車および制動プログラム
【課題】様々な路面において安全、確実に車両を制動することができる電気自動車および制動プログラムを提供する。
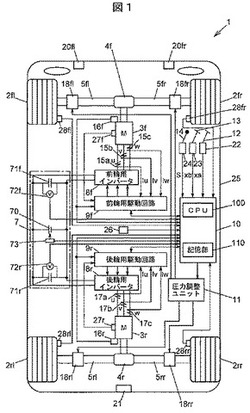
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、各車輪2のスリップ率が所定の値以下のときは、ブレーキペダル13の踏み込み量に応じて機械ブレーキ18の制動力および電気ブレーキの制動力を共に発揮させ、各車輪2のスリップ率のいずれかが所定の値を超えたとき、ブレーキペダル13の踏み込み量に関わらず、所定の値を超えたスリップ率が所定の値以下になるように、電気ブレーキの制動力を制御するとともに、機械ブレーキ18の制動力を段階的に変化させ、又はオンオフ制御する制御装置10とを備える。
(もっと読む)
電気自動車および制動プログラム

【課題】車輪のロックを検出して制動力の制御を行う場合に比較して、制動距離を短くすることができる電気自動車および制動プログラムを提供する。
【解決手段】
前輪側の左右輪2fr,2flと後輪側の左右輪2rr,2rlとを独立に駆動する2つの電気モータ3を有する電気自動車1において、各車輪2のそれぞれに摩擦力による制動力を付与可能な摩擦ブレーキ機構と、運転者のブレーキ操作量に応じて摩擦ブレーキ機構による制動力および電気モータ3による制動力を共に発揮させ、各車輪2の少なくとも何れかのスリップ率が路面の摩擦係数に応じて設定された第1の所定値を超えたとき、ブレーキ操作量に関わらず電気モータ3による制動力を低減し、その後スリップ率が前記第1の所定値よりも低い第2の所定値以下となったとき、電気モータ3による制動力を増加する制御を行う制御装置10とを備える。
(もっと読む)
作業用車両の走行装置
【課題】蓄電装置の過充電を防止すると共に、主ブレーキ装置の過熱による破損やブレーキ力不足の発生を防止し、減速時に十分なブレーキ力を確保しかつ燃費改善も十分に図る。
【解決手段】減速走行時には、それ以外の走行時よりもHSTの油圧モータの容量を増加又は油圧ポンプの容量を減少させ(S6)、この状態で車両の運動エネルギーをHSTを介して回生する。減速走行時でかつ蓄電装置の蓄電量が設定値より小さい場合には、回生したエネルギーにより発電・電動機を発電機として動作させて発電し(S11)、この発電した電力を蓄電装置に蓄電し、このとき補助ブレーキ装置が動作中であれば、発電量の増加に応じて補助ブレーキ装置のブレーキ力を減じるかオフとする(S8)。減速走行時でかつ蓄電装置の蓄電量が設定値より大きい場合には、回生したエネルギーによる発電・電動機の発電動作をオフとし(S13)、補助ブレーキ装置を作動させる(S12)。
(もっと読む)
電動車両の制動制御装置
【課題】電気的制動手段と油圧制動手段とを備え、アンチロック制御を行う際に、静粛性を向上することが可能な電動車両の制動制御装置を提供すること。
【解決手段】目標制動トルクを駆動系の共振周波数を含まない第1周波数成分と、駆動系の共振周波数を含む第2周波数成分とに分解し、第1周波数成分により電気的な制動トルクを与える電動モータを制御し、第2周波数成分により車輪に摩擦制動トルクを与える摩擦制動装置を作動させることとした。
(もっと読む)
電動式ブレーキ装置
【課題】軸力センサにより安定したブレーキ力の検出を可能にするとともに、減速度検出値による制御と組み合わせてあらゆる速度域で高い精度にてブレーキ制御を行う。
【解決手段】ブレーキロータ23の回転面に直交させて電気アクチュエータ4によりブレーキパッド22を押し付けて制動を行う電動式ブレーキにおいて、前記ブレーキパッド22の押付け力を検出する軸力センサ10から得られた検出値と、車輪速度センサ30から演算されて得られた減速度とから、運転者の操作目標とする減速度制御を行うことにより、温度変化の影響を受けにくく指向性を保持し易い直動変換部13、14に配設した軸力センサ10と、制動中のブレーキパッド22の摩擦係数の変化の影響を受けにくい減速度検出とを組み合わせて、操作者のブレーキ要求に基づく電気的ブレーキ制御をあらゆる速度域にて高い精度にて行うことが可能となった。
(もっと読む)
運転支援装置、方法およびプログラム
【課題】無駄な消費エネルギーを的確に提示することが困難であった。
【解決手段】回生ブレーキによる制動および摩擦ブレーキによる制動を行うことが可能な車両において前記摩擦ブレーキによる制動が行われたことを特定し、前記車両の周囲の状況を示す情報を取得し、前記車両の周囲の状況に対応するために必要とされる必要制動力を特定し、前記必要制動力が前記回生ブレーキの最大制動力以下である状態で前記摩擦ブレーキによる制動が行われた場合に当該摩擦ブレーキによって消費されたエネルギーを特定し、当該消費されたエネルギーを示す情報を案内する。
(もっと読む)
航空機の制動制御法と、対応する制動システム
【課題】航空機の制動装置の摩擦要素の磨耗を最小にする。
【解決手段】摩擦ブレーキと、摩擦以外の手段でエネルギーを散逸させることのできる補助ブレーキとが取り付けられた車輪を有する着陸装置を備える航空機において、制動が必要なとき、制動パラメータをテストすることで必要な制動を提供するのに摩擦ブレーキが不可欠ではない制動状況に航空機があるかどうかを判断し、航空機が前記制動状況に留まっている限り補助ブレーキを優先的に作動させ、航空機がその制動状況を逸脱した場合にだけ摩擦ブレーキを作動させることにより必要な制動を実行する。
(もっと読む)
自動車およびその制御方法
【課題】二次電池の入力制限が厳しい側に変化したときでも電動機による回生制動力と機械式ブレーキによる制動力とのすり替えをスムーズに行なう。
【解決手段】バッテリの入力制限Winが所定時間程度経過したときに連続充放電電流積算値が閾値に至って入力制限Winが厳しい方向に変化するのを予測したときには、そのときから所定時間が経過するまでは比較的小さなレート値Trt1を用いてモータMG2の制動時のトルク指令Tm2*を油圧ブレーキによる制動力にすり替え(S150)、所定時間が経過した以降は比較的大きなレート値Trt2を用いてモータMG2の制動時のトルク指令Tm2*を油圧ブレーキによる制動力にすり替える(S160)。これにより、モータMG2の制動トルクをスムーズに油圧ブレーキによる制動力にすり替えることができ、ドライバに与えるブレーキフィーリングの悪化を抑制することができる。
(もっと読む)
タイヤ状態推定装置
【課題】タイヤ状態を精度よく推定する。
【解決手段】タイヤすべり角を推定するタイヤすべり角推定手段500と、タイヤすべり角の前回値、タイヤすべり率及びタイヤ縦力に応じてタイヤ力最大値を推定するタイヤ力最大値推定手段300と、を有し、タイヤすべり角推定手段500は、タイヤ力最大値、タイヤすべり率、タイヤ縦力及び車両状態測定値に基づいてタイヤすべり角を推定する。これによって、タイヤ状態を精度よく推定することができる。
(もっと読む)
回生ブレーキトルク補助装置
【課題】バッテリSOCが十分に高いときでも、回生ブレーキトルクを補助してエンジンブレーキ相当の減速力を得ることができる回生ブレーキトルク補助装置を提供する。
【解決手段】モータに機械的な制動力を与える機械的制動手段(エアブレーキ、エアタンク、エアバルブ)と、この機械的制動手段の制動力の大きさを制御するEV−ECUとを有し、EV−ECUでは目標回生ブレーキトルクmTrqをエネルギーに換算した目標回生ブレーキエネルギーtPと、検出されたバッテリ電圧Vと回生電流Iから求めた実回生ブレーキエネルギーrPとの回生ブレーキエネルギー偏差ΔPを求め、この回生ブレーキエネルギー偏差ΔPが閾値以上のとき、当該回生ブレーキエネルギー偏差ΔPに応じた機械的制動手段の操作量(エアバルブ開度操作量Bpo)を求め、この機械的制動手段の操作量に基づいて、機械的制動手段がモータに与える制動力の大きさを制御する構成とする。
(もっと読む)
電気自動車の車輪スリップ制御装置
【課題】電気自動車の減速走行時における駆動輪のロック傾向及びロック回復傾向を的確に判定して、駆動輪のロックを防止するようにした車輪スリップ制御装置を提供する。
【解決手段】車両ECU(24)は、駆動輪(16,18)の車輪回転速度(Vw)の変化率である車輪速度変化率(ΔVw)と、駆動輪(16,18)のスリップ率(Sw)とに基づき、駆動輪が(16,18)ロックする傾向にあると判定すると、電動機(6)をモータ作動させて電動機の(6)駆動トルクを駆動輪(16,18)に付与する一方、車輪速度変化率(ΔVw)とスリップ率(Sw)とに基づき、駆動輪(16,18)のロック傾向が解消しつつあると判定すると、電動機(6)を発電機作動させて電動機(6)の回生制動トルクを駆動輪(16,18)に付与する。
(もっと読む)
4輪独立駆動車両の制御装置
【課題】インホイールモータのいずれか1つにフェイルが発生し、その出力トルクが減少する状況であっても、安定した走行を継続させることが可能な4輪独立駆動車両の制御装置を提供すること。
【解決手段】駆動力源として力行機能と回生機能とを有する電動機と、摩擦力により車輪を制動するブレーキ装置とを備え、前後左右の4輪のトルクをそれぞれ独立に制御可能な4輪独立駆動車両の制御装置において、前記4輪のいずれか1輪にフェイルが生じた際に、前記電動機が力行制御される場合は、前記車両全体の総駆動トルクを制限し、前記電動機が回生制御される場合は、前記車両全体の総制動トルクを前記フェイルが生じていない通常状態に維持するフェイルセーフ手段(ステップS3,S5)を設けた。
(もっと読む)
電気駆動式機械の駆動方向を制御するための方法とシステム
本願は、1つの態様において、第一の方向に移動している機械の方向を転換するための方法を開示する。この方法は、機械の方向を第二の方向に転換しようとする意思を示す信号を受信するステップを含む。この方法はまた、機械の速度を示す信号がある閾値より大きいか否かを、少なくとも部分的に電気モータのパラメータに基づいて判断するステップを含む。最後に、この方法は、速度が閾値に到達するまで、アクセルペダルの位置を示す信号に応答して制動トルクを機械の少なくとも1つの走行機構にかけるステップを含む。  (もっと読む)
(もっと読む)
液圧アキュムレータ装置および液圧アキュムレータ装置の作動方法
本発明は、総ブレーキ装置、すなわち従来部分と別の部分、例えば回生部分とからなるブレーキ装置の一部として、ブレーキ回路もしくはブレーキペダルのピストン-シリンダユニット内における容積移動を誘起することができる方法および装置を開示する。このことを利用して、ブレーキ装置の液圧部分における制御可能なブレーキブースタによる圧力比の変化をブレーキ装置の別の部分の付加的なブレーキ作用により補償し、これにより、運転手がペダルの位置変化に基づいてブレーキペダルで実施しなくても、異なるブレーキシステムのブレーキ作用から総ブレーキ作用が得られる。本方法は、例えば、電流を生成する発電機として電動機を作動することによりブレーキ遅延が誘起される車両、および従来の液圧式ブレーキシステムを別のブレーキシステムまたはバックアップ-ブレーキシステムとしてさらに備える車両で使用することができる。 (もっと読む)
車両用制御装置および車両用制御方法
【課題】前後輪の駆動力の配分量を理想的な駆動力の配分量に一致させつつ、モータ内の作動油の温度を上昇させて燃費の悪化を改善する。
【解決手段】ECUは、アクセルペダルの踏み込み量がゼロである場合に(S100にてYES)、実モータ温度と理想モータ温度との偏差を算出するステップ(S102)と、モータの必要発熱量を推定するステップ(S104)と、モータ発熱を要する場合に(S106にてYES)、モータの出力電力あるいは回生電力を算出するステップ(S108)と、オルタネータにおける発電電力あるいは吸収電力を算出するステップ(S110)と、モータおよびオルタネータを制御するステップ(S112)と、駆動力の配分量の目標値との偏差を算出するステップ(S114)と、制動装置を制御するステップ(S116)と、エンジンを制御するステップ(S118)とを含む、プログラムを実行する。
(もっと読む)
電動車両の制振制御装置
【課題】ブレーキ制動力の発生時、余分な振動抑制補償の出力を抑え、ブレーキ効き感の悪化を防止することができる電動車両の制振制御装置を提供すること。
【解決手段】動力源にモータ/ジェネレータMGを有するFRハイブリッド車両において、ドライバー要求に基づくF/F演算により第1トルク目標値Tm*1を算出する第1トルク目標値算出手段101と、トルク入力−モータ回転数の伝達特性のモデルGp(s)を用いたF/B演算により第2トルク目標値Tm*2を算出する第2トルク目標値算出手段102と、第1トルク目標値Tm*1と第2トルク目標値Tm*2に基づく演算によりモータトルク指令値Tm*とするモータトルク指令値設定手段103と、を備えている。第2トルク目標値算出手段102は、ブレーキ制動力Fbrkを入力し、ブレーキ制動力に対するモータ回転数の伝達関数Gpb(s)によるフィルタを用いてモータ回転数推定値補正量を算出する規範応答補正量算出部102aを有する。
(もっと読む)
車両用制動制御装置
【課題】 回生協調制御により回生制動トルクと摩擦制動トルクとをすり替えるときの減速度の変動を抑制できる車両用制動制御装置を提供する。
【解決手段】 統合コントローラ110は、回生協調制御時、回生制動トルク変化量ΔRegが大きいほど、インプットロッドストロークXiの変化量に対するプライマリピストン2bの変化量を減少させるアシスト推力補正手段を備える。
(もっと読む)
ハイブリッド車両の制御装置
【課題】減速時にエンジンの燃料カットリカバリを行う際、モータジェネレータによりエンジン回転数を維持できる条件下でのリカバリショックの発生を防止しつつ、モータジェネレータによりエンジン回転数を維持できない条件下でのエンジンストールを防止することができるハイブリッド車両の制御装置を提供すること。
【解決手段】エンジンEngとモータジェネレータMGと第1クラッチCL1と第2クラッチCL2を備えたハイブリッド車両において、両クラッチCL1,CL2を締結し、エンジン燃料カット状態での走行中、エンジンストールに至るようなエンジン減速度を検知した場合、モータジェネレータMGによりエンジン回転数を維持できるときは、第2クラッチCL2を開放した後、エンジンEngの燃料カットをリカバリし、モータジェネレータMGによりエンジン回転数を維持できないときは、第1クラッチCL1を開放し、エンジンEngの燃料カットをリカバリする燃料カットリカバリ制御手段(図4)を設けた。
(もっと読む)
電動車の制御装置
【課題】回生制動中に摩擦クラッチが滑り状態となったとき、ショック無く、且つ、滑り発生から早期に摩擦クラッチを締結状態に移行させることで、車両減速度や回生量への低下影響を最小に抑えることができる電動車の制御装置を提供すること。
【解決手段】モータジェネレータMGと左右後輪RL,RRの間に油圧締結による第2クラッチCL2を介装し、制動要求時、モータジェネレータMGを発電モードとし、第2クラッチCL2を経過して左右後輪RL,RRに回生制動トルクを付与する回生制動制御手段を備えたFRハイブリッド車の制御装置である。回生制動制御手段(図4)は、回生制動制御中、第2クラッチCL2が滑り状態であることを検出したら、第2クラッチCL2の差回転を小さくするようにモータジェネレータMGの回転数を制御し、第2クラッチCL2の差回転を小さくした後、第2クラッチCL2への油圧指令値を増大させる。
(もっと読む)
減速度比推定装置を有する列車制御装置
【課題】列車の減速動作中に実際の車両特性を計測し、この実際の車両特性に基づいて減速動作を制御し、列車を停止目標位置に精度よく停止させる。
【解決手段】車両特性保持手段4は、ブレーキ指令値に対応する標準減速度を車両特性データとして保持する。減速度比推定手段7は減速度算出手段6にて算出された減速度と、車両特性保持手段4にて保持された標準減速度との比を示す減速度比を算出する。制御指令算出手段8は、前記減速度比算出手段にて算出された減速度比を用いて、前記車両特性データを更新し、列車速度及び位置と前記更新された車両特性データに基づいてブレーキ装置へのブレーキノッチ指令値を算出する。
(もっと読む)
21 - 40 / 72
[ Back to top ]