
Fターム[3D246HA35]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 制動状態 (205) | 制動トルク (125)
Fターム[3D246HA35]に分類される特許
1 - 20 / 125
ハイブリッド車両の制御装置
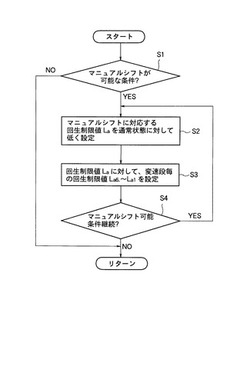
【課題】ブレーキ操作とマニュアルダウンシフトとが重畳する場合であっても、ダウンシフトの際に適切な減速度を発生させ、かつバッテリの耐久性低下を回避することができるハイブリッド車の制御装置を提供する。
【解決手段】マニュアルシフト操作に基づいて複数の変速比の間で変速させるマニュアルシフト手段と、ブレーキ操作に基づいて電動機の回生トルクおよび摩擦ブレーキの摩擦制動トルクによって車両の制動力を制御する制動手段とを備えたハイブリッド車両の制御装置において、蓄電装置の過充電を防止するための通常時回生制限値で前記回生トルクを制限するとともに、前記マニュアルシフト操作の実行が可能な場合に、前記マニュアルシフトによるダウンシフトの実行に先立って、前記通常時回生制限値よりも値が低い回生制限値で前記回生トルクを制限する回生トルク制限手段(ステップS2,S3)とを設けた。
(もっと読む)
ブレーキシステム

【課題】
大型化を抑制しつつ、フェード時にホイールシリンダを増圧することができるブレーキシステムを提供すること。
【解決手段】
ブレーキ操作に応じてリザーバ4から遮断されて液圧室33にて液圧を発生するマスタシリンダ3と、リザーバ4から液圧室33へのブレーキ液の流れを許容する逆止弁9とを有し、フェード状態にあると判定したとき、液圧室33とホイールシリンダ6との間に設けられた液圧ユニット5が、逆止弁9を介してリザーバ4のブレーキ液を吸引し、ホイールシリンダ6へ供給することとした。
(もっと読む)
車両用制動支援装置
【課題】坂路にて自車両の停止中に自動制動の制動力を解除した際に、自車両の動作が運転者が意図しないものになることを防止する。
【解決手段】車両用衝突回避制動支援装置1は、障害物との接近に関するリスクポテンシャルを算出するリスクポテンシャル演算部31と、走行路の勾配を検出する外乱推定部32と、自車両が停止中に、リスクポテンシャルに基づき自車両に付与した制動力を解除する際のその減少度合いを、リスクポテンシャル及び走行路の勾配に基づいて変更する制動力演算部40とを備える。
(もっと読む)
車両用ブレーキ装置
【課題】一制動期間内でABS制御手段が作動し終了した後に再始動する見込みを増加させない範囲で回生制動力を発生し、従来よりも回生効率を向上した車両用ブレーキ装置を提供する。
【解決手段】液圧ブレーキ装置と、回生ブレーキ装置と、目標取得手段、協調制御手段、およびアンチロックブレーキ制御手段を有する制動制御装置とを備える車両用ブレーキ装置であって、制動制御装置は、ブレーキ操作部材が継続して操作されている一制動期間内でアンチロックブレーキ制御手段が作動したときに、ABS制御期間が終了して協調制御手段が再始動した時点(時刻t4)の目標制動力FRを回生許可制動力FHと演算する最終値演算手段と、一制動期間内でABS制御期間が終了して協調制御手段が再始動した(時刻t4)以降に作動し、目標制動力FRが回生許可制動力FH未満であるときにのみ回生制動力FEの発生を許可する回生許可手段と、をさらに有する。
(もっと読む)
車両トレーラに接続される牽引車を制御する方法及びシステム
【課題】トレーラを牽引する牽引車を制御するための、改善された方法及びシステムを提供する。
【解決手段】車両トレーラ102に接続されている牽引車100を制御する方法、及び当該方法を使用するシステム。本方法は、車両目標のセット及び当該車両目標のセットに応答する車両状態のセットを検知することを含む。本方法は、車両目標のセットと車両状態のセットとの間の複数の差を求めること、当該複数の差の傾向を求めること、当該傾向に基づいて対称信号及び非対称信号のうちの少なくとも一方を生成すること、並びに、当該対称信号及び非対称信号のうちの少なくとも一方を用いて車両システムを作動させることも含む。
(もっと読む)
車両の回生ブレーキ制御装置
【課題】比較的高速から低速まで一定の踏み込み量のブレーキペダル操作で減速をしても違和感の無い減速を可能とし、ABS作動時の減速感の途切れを抑えて運転者の不安感を解消することができる車両の回生ブレーキ制御装置を提供すること。
【解決手段】ABS装置と液圧ブレーキ及び回生ブレーキを備えた車両の液圧ブレーキによって発生する液圧制動力と回生ブレーキによって発生する回生制動力をABSの動作と車速に応じて制御して運転者が要求する制動力を得るとともに、回生ブレーキは、アクセルペダルの開放状態が検知されると「アクセルOFF回生制動力」を発生させ、ブレーキペダルの踏み込み操作が検知されると「ブレーキON回生制動力」を発生させ、ABS作動時に前記回生制動力をABS非作動時のそれよりも下げるよう制御する車両の回生ブレーキ制御装置において、回生制動力の低車速域の値が高車速域の値よりも大きくなるよう制御する。
(もっと読む)
車両制御装置
【課題】大型化を回避しつつ音振性能を確保し、安価でありながら適切な回生協調制御を達成可能な車両制御装置を提供すること。
【解決手段】モータを駆動源とする車両において、制動時にモータによる回生制動力と油圧による摩擦制動力とを協調させる回生協調制動力の制御において、回生協調制御により回生制動力から摩擦制動力にすり替えるときは、設定したすり替え速度範囲において、ギヤポンプの能力や音振性能への影響を及ぼさない範囲で、各制動力の変化勾配を最大変化勾配より小さな所定勾配以下に制限することで所望の制動力を得るととした。
(もっと読む)
ブレーキ制御装置
【課題】異常が発生した場合において制動力を充分に確保することを可能とするブレーキ制御装置を提供する。
【解決手段】ブレーキ制御装置は、液圧制動力と回生制動力とを併用して制動力を発生させる。このブレーキ制御装置は、異常時において補助的に発生させる回生制動力の要求値を演算する制御部と、運転者のブレーキ操作に連動して変動する検出値を制御部に各々が出力する複数のセンサと、を備える。制御部は、複数のセンサのいずれかを選択し、選択されたセンサの検出値を要求値の算出の基礎として用いる。
(もっと読む)
電動ブレーキ装置
【課題】 制動力の低下を抑えつつ、モータコイルやモータブラシの過熱を抑制することが可能な電動ブレーキ装置を提供する。
【解決手段】 本発明の電動ブレーキ装置は、電動ブレーキアクチュエータ部が、車輪に生じる実制動力を検出する制動力検出部と、電動モータのモータ温度を検出するモータ温度検出部と、を有し、電気制御部が、ブレーキ操作量に基づいて要求制動力を演算する要求制動力演算部と、要求制動力に実制動力をフィードバックして制御制動力を演算するフィードバック制御演算部と、制御制動力に基づいて電動モータの駆動信号を生成する駆動信号演算部と、モータ温度検出部の検出結果に基づいて電動モータの過熱を抑える過熱保護モードに移行するか否かを判定する過熱保護モード判定部と、過熱保護モード判定部が過熱保護モードと判定したときに電動モータへ供給する電流の電流変動量を抑制する電流変動量抑制補正部と、を有する。
(もっと読む)
車両の運転支援制御装置
【課題】ドライバに対して的確なロードインフォメーションを伝達しつつ、降坂時定速走行制御を変速ショックや振動等の不快感を与えることなくスムーズに行う。
【解決手段】ドライバが降板時定速走行を選択した際には、エンジンブレーキ、走行抵抗Fresistに基づいてタイヤ総制動力Ftireを算出し、道路勾配θに基づいて車両が設定速Vhdcで走行するのに必要な要求制動力Fdemandを算出し、降板走行を設定速Vhdcで走行するのに制動力が不足するか否かを判定し、制動力が不足すると判定した場合には、不足する前後輪の制動力Fbrkf、Fbrkrを、車輪の接地荷重配分に応じて設定し、ブレーキ制御部32に出力する。また、制動力が不足する場合と制動力が十分な場合とで前後軸間の駆動力配分を車輪の接地荷重配分に応じて略同一になるように設定し、前後駆動力配分制御部31に出力する。
(もっと読む)
自動車用の制動装置および制動方法
【課題】自動車用の制動装置および制動方法を提供する。
【解決手段】可変特性曲線に従って、運転者が操作できるブレーキペダル装置12と、ブレーキペダル装置12の操作量に対応し、かつ可変特性曲線に対応する制動効果で自動車を制動する制動ユニット20と、可能特性曲線領域を保存するメモリ装置16と、可能特性曲線領域から可変特性曲線を選択するために設けられた制御ユニット14とを有する、自動車用の制動装置および制動方法を提供する。
(もっと読む)
ブレーキ制御装置およびブレーキ制御方法
【課題】走行条件や車両条件に応じてブレーキ力を制御し、滑走の発生頻度を低減させることを可能とするブレーキ制御装置およびブレーキ制御方法を得ること。
【解決手段】複数の車両により構成される列車を制動させるブレーキ力を演算するブレーキ力演算部5と、車両の車輪の滑走を検知した際の車両のブレーキノッチ位置および走行速度を含む走行情報、および滑走情報を記録し、走行情報と滑走情報とに基づいて滑走予測を行い、ブレーキ力に対する車両毎、台車毎、あるいは軸毎の分担ブレーキ力の割合を示すブレーキ分担率を演算する滑走抑制制御部12と、ブレーキ力とブレーキ分担率とに基づいて分担ブレーキ力を設定し、基礎ブレーキ装置にブレーキ制御信号を出力するブレーキ力設定部6と、を備える。
(もっと読む)
タイヤ接地状態推定装置
【課題】タイヤ接地状態の推定精度を向上させる。
【解決手段】転舵角、車速、及び前輪の路面摩擦係数に基づいて、前輪SAT推定値を推定し、車速に基づいて、後輪スリップ率推定値を推定し、転舵角、車速、及び後輪及び前輪の路面摩擦係数に基づいて、車両の横加速度推定値を推定する。一方、前輪のSAT検出値を検出し、後輪スリップ率検出値を検出し、車両の横加速度検出値を検出する。そして、前輪SATの推定値と検出値との差分で定義される前輪SAT推定誤差を演算し、後輪スリップ率の推定値と検出値との差分で定義される後輪スリップ率推定誤差を演算し、横加速度の推定値と検出値との差分で定義される横加速度推定誤差を演算する。そして、前輪SAT推定誤差、後輪スリップ率推定誤差、横加速度推定誤差のうち、少なくとも一つに応じて、後輪及び前輪の路面摩擦係数を補正する。
(もっと読む)
リターダの制御装置、車両およびリターダ制御方法、並びにプログラム
【課題】走行条件に係らず補助ブレーキとしての機能を充分に発揮させ、ECUの共通化を図ること。
【解決手段】リターダの動作中に生じる自車両の減速度を計算する補助ブレーキ力計算部71および減速度計算部72を有し、補助ブレーキ力計算部71および減速度計算部72が計算した減速度が取得した加速度情報よりも小さいときには、所定の閾値を、放熱手段(ドラム)の回転速度の変化に対応させて可変的に設定し、補助ブレーキ力計算部71および減速度計算部72が計算した減速度が取得した加速度情報よりも大きいときには、所定の閾値を、一定値に設定し、温度検出手段によって検出された放熱手段(ドラム)の温度が、回転速度検出手段によって検出された放熱手段(ドラム)の回転速度に対応する所定の閾値を超える温度であるときに、電気エネルギの発生を低減させる制御を行うリターダの制御装置を構成する。
(もっと読む)
車両の横方向運動制御装置
【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、車両の横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために協調して作動する複数の制御対象の横方向運動制御量を演算し、演算した横方向運動制御量に基づいて複数の前記制御対象を制御する。また、複数の前記制御対象の制御を停止するか否かを判断する。複数の前記制御対象の制御を停止すると判断したときに、そのときから複数の前記制御対象の横方向運動制御量が縮退するように、複数の前記制御対象の横方向運動縮退制御量をそれぞれ決定し、決定した横方向運動縮退制御量に基づいて複数の前記制御対象を制御する。
(もっと読む)
車両運動制御装置およびそれを有する車両運動制御システム
【課題】制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をアベイラビリティ演算部5から制御要求部1に対して伝える。これにより、各アプリケーションでアベイラビリティ情報を踏まえて、性能限界を超えない制御要求を生成することが可能となり、制御対象のアベイラビリティに応じて、より最適な車両運動制御を実行することが可能となる。
(もっと読む)
車両運動制御システム
【課題】アプリケーションからの制御目標値に応じて制御プラットフォームが制御対象を最適制御する構造において、意図しない車両挙動が生じることを防止する。
【解決手段】制御目標値・アベイラビリティ比較部8にて、アベイラビリティ演算部5から伝えられるアベイラビリティ情報と制御要求部2などから伝えられる制御目標値とを比較し、その比較結果に基づいて車両横方向運動制御を実行するか否かを決める。これにより、アプリケーション1〜nや制御プラットフォームでのソフト的な異常による演算の誤りや、制御対象の制御に用いられるACT16〜19の異常、車両状態(例えば、路面μ)の急激な変化により、大きな車両の異常挙動を引き起こすことを防止できる。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】F/B演算部7での制御対象の選択について、各制御対象のアベイラビリティである最大制御量から各制御対象のF/F要求値を引いた差から各制御対象の余裕度を演算し、この余裕度に基づいて行うようにする。これにより、余裕度がF/B要求値よりも大きな制御対象を選択して車両横方向運動制御を実行することが可能となる。したがって、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
回生制動制御装置
【課題】本発明は、ブレーキフィーリングを向上することのできる回生制動制御装置を提供する。
【解決手段】ペダル回生最大トルク演算ブロック(B18a)では、入力された車速におけるブレーキペダル操作で発生しうる最大の回生トルクであるペダル回生最大トルクが演算される。また、ゲイン演算ブロック(B18b)では、ブレーキペダルストローク量が所定操作量以下の少ない領域においてはブレーキペダルストローク量の変化量に対するゲインの変化量を少なくし、ブレーキペダルストローク量が所定操作量より多い領域においてはブレーキストローク量の変化量に対するゲインの変化量を多くしている。そして、ペダル回生最大トルクとゲインとを乗算し、ペダル回生トルクが演算され、切換ブロックに供給される。
(もっと読む)
車両のブレーキ制御装置および編成列車のブレーキ制御装置
【課題】従来は回生ブレーキと空気ブレーキの協調制御において空気ブレーキの応答遅れを実回生ブレーキ力に所定の補正量を付加することで補っていたため、車両状態および気温等の外部状態に応じて毎回異なる空気ブレーキの応答遅れに対応できず、回生ブレーキと空気ブレーキの総和が必要なブレーキ力と一致しなかった。
【解決手段】車両のブレーキ制御装置に出力可能な回生ブレーキ力を推定する手段を設け、推定された回生ブレーキ力と必要ブレーキ力から空気ブレーキ力の指令値を決定し、回生ブレーキ力の指令値は必要ブレーキ力と実際に作用した空気ブレーキ力からを決定することで、ブレーキ力の総和を必要ブレーキ力に一致させることができ、さらに現車での補正量調整が不要となる。
(もっと読む)
1 - 20 / 125
[ Back to top ]