
Fターム[3D246HA67]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車輪状態 (1,921) | 車輪加減速度 (81)
Fターム[3D246HA67]に分類される特許
1 - 20 / 81
ブレーキ制御装置及びブレーキ制御方法
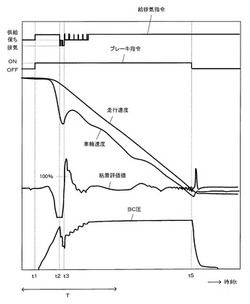
【課題】ブレーキ距離の延伸を抑制すること。
【解決手段】時刻t2において滑走の発生を検知すると、排気制御を開始し(ブレーキ力の低下)、その後、時刻t3において粘着評価値が再給気開始条件を満たすと、給気を開始する(ブレーキ力の増加)。粘着評価値は、ブレーキ力相当値であるBC圧と、車輪の減速度とから求められる。
(もっと読む)
車両の制動制御装置

【課題】車両の制動制御装置において、制動時における車両の挙動を安定させることで安全性の向上を可能とする。
【解決手段】ECU41として、車輪FR〜RLのスリップが抑制されるように制動装置22を作動制御するABS制御装置51と、車両11の周辺情報に基づいて制動装置22を作動制御する自動制動制御装置52と、ABS制御装置51の作動開始の閾値を自動制動制御装置52の非作動時より自動制動制御装置52の作動時の方が小さくなるように変更する作動開始閾値変更装置とを設ける。
(もっと読む)
車両の回生ブレーキ制御装置
【課題】比較的高速から低速まで一定の踏み込み量のブレーキペダル操作で減速をしても違和感の無い減速を可能とし、ABS作動時の減速感の途切れを抑えて運転者の不安感を解消することができる車両の回生ブレーキ制御装置を提供すること。
【解決手段】ABS装置と液圧ブレーキ及び回生ブレーキを備えた車両の液圧ブレーキによって発生する液圧制動力と回生ブレーキによって発生する回生制動力をABSの動作と車速に応じて制御して運転者が要求する制動力を得るとともに、回生ブレーキは、アクセルペダルの開放状態が検知されると「アクセルOFF回生制動力」を発生させ、ブレーキペダルの踏み込み操作が検知されると「ブレーキON回生制動力」を発生させ、ABS作動時に前記回生制動力をABS非作動時のそれよりも下げるよう制御する車両の回生ブレーキ制御装置において、回生制動力の低車速域の値が高車速域の値よりも大きくなるよう制御する。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】ペダルフィーリングの悪化を抑えつつ、入口弁(常開型比例電磁弁)のハンチングを抑えることを目的とする。
【解決手段】制御部は、常開型比例電磁弁の通電量を第1勾配で減少させる際に、通電量を増加側にオフセットするオフセット制御を実行するオフセット手段を有し、オフセット手段は、電流検出手段で検出された電流値が所定の変動状態となるか否かを判定し(ステップS5)、所定の変動状態となる場合に(Yes)、オフセット制御を実行する(ステップS6)。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】ペダルフィーリングの悪化を抑えつつ、入口弁(常開型比例電磁弁)のハンチングを抑えることを目的とする。
【解決手段】制御部は、常開型比例電磁弁の通電量を第1勾配で減少させる際に、通電量を増加側にオフセットするオフセット制御を実行するオフセット手段を有し、オフセット手段は、第1勾配での通電量の減少を開始した時点(時刻t1)から所定時点(時刻t3)までの初期期間T1と、第1勾配での通電量の減少中に、車輪ブレーキに連通する他の車輪ブレーキが減圧された場合における減圧後のポンプ駆動期間T2と、の間だけオフセット制御を実行する。
(もっと読む)
車両ずり下がり状態判定装置およびそれを備えた車両制御装置
【課題】的確に車両のずり下がり状態を判定することができる車両ずり下がり状態判定装置を提供する。
【解決手段】車両が登坂方向に走行している登坂走行状態において、登坂方向の駆動力が発生しない無駆動力状態とされ、かつ、車輪加速度dVw(つまり車両加速度)が加速方向となったときに、車両ずり下がり状態と判定する。これにより、車両の積載重量の影響を受けることなく、正確に車両ずり下がり状態を判定することが可能となる。そして、このような正確な車両ずり下がり状態の判定結果に基づいて、アイドルストップ制御ではエンジン再始動を行い、坂路保持制御ではブレーキ力を増加させることで、車両ずり下がりを抑制することが可能となる。
(もっと読む)
アンチスキッド制御装置
【課題】積載重量の変化に対応したより最適なABS制御を行えるようにする。
【解決手段】前高μ輪に対して実行される制御中ヨーコン制御において、推定積載重量に応じて圧力閾値Pholdを可変とし、推定積載重量に応じて設定される圧力閾値Pholdに基づいて保持制御と緩増圧制御の選択が行われるようにする。このようにすれば、より細かく推定積載重量に応じた最適なABS制御を行うことが可能となる。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】車輪が継続して振動する場合に、減圧量の大小に拘わらず増圧補正をすること。
【解決手段】サイクル時間が第1の所定時間以内であるか否かを判定する第1サイクル時間判定手段と、車輪加速度が所定値以上であるか否かを判定する車輪加速度判定手段と、第1サイクル時間判定手段でサイクル時間が第1の所定時間以内であると判定され、且つ、車輪加速度判定手段で車輪加速度が所定値以上であると判定されたことを条件として、今回の増圧制御の開始時点におけるブレーキ液圧と目標ブレーキ液圧との差に基づいて補正増圧レート及び補正時間を決定する補正変数決定手段28と、前記決定された補正時間及び補正増圧レートで補正する補正手段29とを備える。
(もっと読む)
フェード判定装置及び制動装置
【課題】適正にブレーキ装置のフェード状態を判定することができるフェード判定装置及び制動装置を提供することを目的とする。
【解決手段】フェード判定装置7は、車両1の減速度と車両1の車輪2のスリップ量とに基づいて、車輪2を制動するブレーキ装置11のフェード状態を判定することを特徴とする。制動装置6は、車両1の車輪2に生じる制動力を調節可能なブレーキ装置11と、制動力を制御して車輪2のスリップ状態を制御する制御装置7とを備え、制御装置7は、車両1の減速度と車輪2のスリップ量とに基づいて、ブレーキ装置11のフェード状態を判定し、フェード状態に応じて制動力の増減量を調節することを特徴とする。したがって、適正にブレーキ装置11のフェード状態を判定することができる、という効果を奏する。
(もっと読む)
車両用制動制御システム
【課題】走行路の路面摩擦係数μの変化に対する制動制御のロバスト性を向上できる車両用制動制御システムを提供すること。
【解決手段】この車両用制動制御システム1は、流体圧Pに応じた制動力を車輪11FRに付与するホイールシリンダ22FRと、車輪加速度DVWに基づいてホイールシリンダ22FRの流体圧Pを制御する制御装置4とを備えている。そして、制御装置4が、急制動の開始後かつABS制御の開始前に、所定の流体圧Pをホイールシリンダ22FRに付与して車輪加速度DVWの復帰レベルΔDVWを取得し、この車輪加速度DVWの挙動に基づいて流体圧Pの制御目標値を算出している。
(もっと読む)
アンチロックブレーキ制御装置
【課題】ABS制御を実行する車輪の回転速度のみに基づいて、実際の路面状態に沿ったABS制御を実行することができるアンチロックブレーキ制御装置を提供する。
【解決手段】アンチロックブレーキ制御手段65は、検知された回転速度Vに基づいて算出された前輪減速度Gが第1スリップ検出閾値G1を超えることで前輪WFのロック状態を判定すると共に、乗員の操作により生じているブレーキ圧を開放制御してロック状態を解消する。ブレーキ圧の開放制御に伴って前輪WFの回転が復帰する際に発生する復帰加速度Gfに基づいて、少なくとも路面摩擦の大きさに起因すると共に自動二輪車1の停止しやすさの指標となる推定減速度Gsを導出する路面摩擦推定手段66を具備する。アンチロックブレーキ制御手段65は、推定減速度Gsに応じて目標前輪回転車速Vmを算出し、ABS制御中は回転速度Vが目標前輪回転速度Vmに収束するようにブレーキ圧を制御する。
(もっと読む)
車両用制動力制御装置
【課題】制動力の前後輪配分を制御する際の車両の余分なヨーレートに起因するふらつきを防止する。
【解決手段】制動時に後輪の車輪速度が前輪の車輪速度よりも車輪速度の目標相違量高い後輪の目標車輪速度になるよう左右後輪の制動力を個別に制御することにより制動力の前後輪配分制御を行う車両用制動力制御装置。前輪に対する後輪の目標車輪速度Vwrtを演算し(S100)、接地荷重増大側の後輪の目標車輪速度が接地荷重減少側の後輪の目標車輪速度に比して低くなるよう、車両のロールレートφdに基づいて後輪の目標車輪速度を補正することにより、左右後輪の目標車輪速度Vwrlt及びVwrrtを演算する(S150〜600)。そして左右後輪の車輪速度が目標車輪速度になるよう制動力を制御する(S950)。
(もっと読む)
振動付与構造検出装置及び車両制御装置
【課題】車両が振動付与構造に接触することを高精度に検出できる振動付与構造検出装置等を提供する。
【解決手段】コントローラ(1)は、自車両が走行車線から逸脱する可能性である車線逸脱傾向が有るかを判断する車線逸脱判断部(11)と、路面から自車両に入力される振動を検出する振動検出手段(3,14-16)と、検出された振動のうち振幅が予め定められた所定の振幅閾値以上である振動の周波数が所定の周波数範囲である場合に、自車両が走行する走行路外であって走行路の延在方向に沿って設けられ車両に振動を付与する振動付与構造に対して車両の車輪が接触していると判断するランブルストリップス検出部(17,18)と、振幅閾値を設定する周波数閾値設定部(13)とを備え、周波数閾値設定部(13)は、車線逸脱判断部(11)によって車線逸脱傾向が有ると判断されている場合に、車線逸脱傾向が有ると判断されていない時の振幅閾値に比して、振幅閾値を小さい値に設定する。
(もっと読む)
車両の制御装置及び車両の制御方法
【課題】運転手によるブレーキ操作量又はマスタシリンダ内の流体圧を検出するためのセンサを用いなくても、車両のエンジンを自動的に停止させるタイミングを設定することができる車両の制御装置及び車両の制御方法を提供する。
【解決手段】ブレーキ用ECUは、車両に設けられた加速度センサからの検出信号に基づき車体加速度Gを演算する。そして、ブレーキ用ECUは、車両の停車前に演算した車体加速度Gの絶対値が、車両で発生するクリープトルクに相当する加速度として設定されたクリープ加速度Acの絶対値よりも大きい場合に、エンジンの停止を許可する停止制御を行う(第2のタイミングt12)。
(もっと読む)
車両の制御装置及び車両の制御方法
【課題】運転手によるブレーキ操作に基づき車両のエンジンを自動的に停止させる機能を有する車両において、制動制御を阻害することなくエンジンを速やかに再始動させることができる車両の制御装置及び車両の制御方法を提供する。
【解決手段】ブレーキ用ECUは、車輪に制動力が付与されない状態で走行する場合における車両の加速度の推定値として惰性加速度Dgを取得し(ステップS27)、該惰性加速度Dgに基づき第1車速推定値VS1を取得し(ステップS28)、取得した第1車速推定値VS1が制動制御許可基準値KVS未満である場合に(ステップS29:YES)、エンジンの再始動を許可する(ステップS30)。
(もっと読む)
車両の制振制御装置
【課題】 通常の制振制御に復帰したときのハンチングの発生を抑制することで制振制御の実行頻度の向上を図ることが可能な車両の制振制御装置を提供すること。
【解決手段】 車体バネ上振動を抑制するような補正トルクに基づいて制駆動トルク発生手段に対し補正トルク指令値を出力するにあたり、補正トルクの振幅が所定振幅以上の状態が所定時間継続しているときは、通常時補正トルク指令値よりも小さな値のハンチング時補正トルク指令値を出力し、その後、補正トルクの振幅が所定振幅以下となる状態が第1の所定時間継続したときは、補正トルク指令値の出力をハンチング時補正トルク指令値から通常時補正トルク指令値に復帰させ、第1の所定時間が経過する前に補正トルクの振幅が所定振幅を超える状態が所定時間継続したときは、ハンチング時補正トルク指令値の出力を継続する。
(もっと読む)
自動二輪車の制動装置
【課題】前輪のブレーキ操作力に適切なアシスト力を加えることにより、フロントサスペンションの伸び上がりをコントロールし、旋回性を良好にする。
【解決手段】前輪ブレーキのキャリパシリンダ8に連通路11、液圧制御部12を介してマスタシリンダ6を接続し、液圧制御部12には弁13を備え、コントロールユニット14にて開閉制御する。コントロールユニット14は車速センサ17より車速及び減速度を算出し、マスタシリンダ6に設けたマスタシリンダ圧検出センサ19よりブレーキ操作量を検出する。操作レバー5を放すと、コントロールユニット14はマスタシリンダ圧検出センサ19の検出する液圧低下に基づきブレーキ操作量の変化率を算出し、所定の割合を超えると弁13で連通路11を絞り、急激なキャリパ圧の低下を防いでブレーキ制動力を維持させ、フロントサスペンションの急な伸びを抑制し、コーナリングを容易にする。
(もっと読む)
車両の制駆動力制御装置
【課題】車両の制駆動力制御装置において、走行抵抗の大きな路面であっても、最適な制動力により車両を停止することで容易に再発進を可能とする。
【解決手段】車両11が走行する路面の走行抵抗を検出する走行抵抗検出部62と、駆動力の余剰分を検出する駆動力余剰分検出部63と、ドライバの要求制動力を算出する要求制動力算出部64と、路面の走行抵抗が予め設定された所定の走行抵抗より大きいときに要求制動力から駆動力の余剰分を減算して目標制動力を算出する目標制動力算出部65とを設ける。
(もっと読む)
車両用制動装置および車両用制動装置の制御方法
【課題】装置構成に要する費用が嵩むことを防止して、車両の減速度の算出精度を向上させて、車両の制動力を適切に制御する。
【解決手段】車両用制動装置10は、車輪速センサ45により検出された車輪速VWに基づく推定車体減速度GRDVと加速度センサ46により検出された前後方向加速度Gfrとに基づき車体速度VRを算出する車体速度演算部54と、車体速度VRに基づく目標車輪速VWPと車輪速センサ45により検出された車輪速VWとの車輪速偏差VWERに基づき制動トルクを制御するバルブ制御部61とを備える。
(もっと読む)
付随車用アンチロックブレーキシステム
【課題】電気ブレーキ指令線が無い貨車にも適用することができ、ブレーキ条件に依存することなく滑走防止制御演算部を起動させて、滑走を適切に抑制可能なアンチロックブレーキシステムを提供する。
【解決手段】空気圧力により制動力を発生させる制動力発生機構1と、速度センサ2と、速度センサ2からの回転速度信号に基づいて制動判別処理及び滑走判別処理を行い滑走状態であれば滑走防止信号を出力する滑走防止制御演算部3と、滑走防止信号を受け再粘着動作を行う滑走防止弁4と、車輪の回転運動に基づいて電力を発生する発電機5と、滑走防止制御演算部3に電力を供給可能な蓄電部6と、発電機5の出力を基に所定電圧を生成する電圧生成充電制御部7とを備え、電圧生成充電制御部7から発電機出力と蓄電部6の蓄電出力との高位優先電圧で滑走防止制御演算部3に電力を供給するアンチロックブレーキXとした。
(もっと読む)
1 - 20 / 81
[ Back to top ]