
Fターム[3D246HA97]の内容
ブレーキシステム(制動力調整) (55,256) | 検知、推定情報−車両情報 (14,591) | 車体状態 (4,109) | 重量 (143)
Fターム[3D246HA97]の下位に属するFターム
輪荷重、軸荷重 (77)
Fターム[3D246HA97]に分類される特許
41 - 60 / 66
車体速度制御装置

【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
二輪車走行支援装置

【課題】二輪車の安定性を確保しつつ、道路に設置した路側送信機から送信された当該道路における走行支援に関する情報を受信して二輪車の走行支援を行うことが可能な二輪車走行支援装置を提供する。
【解決手段】道路に設置したビーコンから送信されたISA及び停止制御に関する情報を受信して走行支援を行う二輪車走行支援装置において、ISA制御部43は、判定した二輪車の安定性に応じて、二輪車の走行支援の態様を変更するため、二輪車の安定性を確保しつつ、道路に設置したビーコンから送信された当該道路におけるISAに関する情報を受信して二輪車の走行支援を行うことが可能となる。
(もっと読む)
駐車ブレーキ内蔵ディスクブレーキ
【課題】ブレーキディスクやブレーキパッドの熱膨縮が生じても安定した駐車ブレーキの制動力を確保して車両の実質的な静止状態の維持ができる駐車ブレーキ内蔵ディスクブレーキを提供する。
【解決手段】駐車ブレーキ内蔵ディスクブレーキ100は、常用ブレーキを使用して走行中の車両を制動停止させた場合、ブレーキパッド14はディスクロータ18に押圧されて発熱して膨張する。この状態でPKBを動作させると、ディスクロータ18やブレーキパッド14が冷えて収縮した場合、押圧力が低下する場合がある。そこで、駐車ブレーキ内蔵ディスクブレーキ100は収縮が生じる場合、形状変形部材78aまたは形状変形部材78bを形状変形させてブレーキパッド14の裏金14bに対し押圧力を追加付与して制動力の低下を回避させる。
(もっと読む)
車両用制御装置
【課題】車両の走行に必要な駆動力を確保する車両用制御装置(6,7,8)において、コーナリング中に横方向加速度を受けることをあまり好まない安定嗜好の運転者に対して不安・不快意識を抱かせないようなコーナリングを可能とする。
【解決手段】走行路のコーナの手前位置で、少なくとも車両重量、現在車速、前記コーナの曲率および路面勾配等の情報を収集して、前記コーナを現在車速で走行する際に車両に発生する横方向加速度を推定する推定手段(ステップS1,S2)と、この推定手段の推定結果が予め規定される閾値以上の場合に、安定嗜好の運転者が不安・不快意識を持つ条件が成立したと認識して、駆動力を小側に制御する対処手段(ステップS3〜S6)とを含む。
(もっと読む)
制動力制御装置,駆動力制御装置及び制駆動力制御装置
【課題】良好な減速性能を発揮しながら車輌の挙動の安定化を図ること。
【解決手段】少なくとも後輪10RL,10RRに対して個別の大きさの制動力を働かせることの可能な制動力発生装置(油圧制動手段21FL,21FR,21RL,21RRやブレーキアクチュエータ23等)を制御する油圧制動力制御装置30において、またぎ路面制動動作時に高μ路側と低μ路側の各車輪の制動力の差によって発生する車輌のヨーモーメントを抑制可能な高μ路側の後輪10RL(10RR)の横力を求める横力演算手段と、高μ路の路面摩擦係数と高μ路側の後輪10RL(10RR)における接地荷重に基づいてまたぎ路面制動動作時における後輪10RL(10RR)の最大摩擦力を求める最大摩擦力演算手段と、その横力と最大摩擦力に基づいてまたぎ路面制動動作時に高μ路側の後輪10RL(10RR)に対して働かせる制動力を求める目標制動力演算手段と、を備えること。
(もっと読む)
自動車の坂道運転支援装置におけるデータ処理方法
データ獲得ステップ中に記録される、クラッチによって伝達されるトルクの値とクラッチ制御機構の位置の値との間の対応関係(CC)を定義するデータの処理方法であって、クラッチによって伝達されるトルクの値とクラッチ制御機構の位置の値との間の修正された対応関係(CCtkf)を定義するために、記録されたデータを修正するステップを含み、この修正された対応関係は、クラッチとブレーキシステム(5)とを含むパワートレインによって駆動輪に連結されるパワーユニットを備えた自動車(7)の坂道運転支援装置(8)内で利用されるためのものであり、前記支援装置が前記ブレーキシステムの締め付け解除を自動的に制御することを特徴とする方法。  (もっと読む)
(もっと読む)
制動装置用操作装置
【課題】常用制動機及び駐車制動機を持つ車両の制動装置用操作装置の操作素子により示される操作状態を実際の操作状態との相違を回避する。
【解決手段】操作装置が、第1のモードにおいて、かつ第1の偏位範囲10、中立位置N又は中立位置Nに隣接するが第1の偏位範囲から離れかついわゆる第3の偏位位置36により限定されるいわゆる第3の偏位範囲34にある操作素子の位置において、第2の操作状態を持ち、第2のモードにおいて、かつ第1の偏位範囲10、中立位置N又は第3の偏位範囲34にある操作素子の位置において、第1の操作状態を持つように、この操作装置が構成されており、第1の切換え位置をとることによって、第1のモードが第2のモードへ切換え可能であり、第2の切換え位置をとることによって、第2のモードが第1のモードへ切換え可能である。
(もっと読む)
車両用制動制御装置
【課題】車両用制動制御装置において、車両の走行状態や制動操作状態に拘らず十分なブースタ負圧を確保して高精度な制動力制御を可能とする。
【解決手段】エンジン101の吸気負圧を利用してブレーキペダル11の操作により発生した操作力を高めて伝達するブレーキブースタ12と、ブレーキブースタ12により高められた操作力で発生したマスタシリンダ圧力を制動力として出力するマスタシリンダ13とを設け、ブレーキECU116は、車輪のスリップ率が予め設定された判定値より高いとき、または、路面摩擦係数が予め設定された判定値より低いときに、エンジン101または発電機103によりエンジン101を駆動して吸気負圧を高く調整する。
(もっと読む)
車両用制御装置
【課題】本発明は、路面の状況の変化にかかわらず、常に先行車や障害物との距離を検出して精度の高い先行エリア状態検出制御を行い得る車両用制御装置を実現することを目的としている。
【解決手段】このため、レーダにより車両前方に先行する車両、あるいは障害物があるかどうかを検出する先行エリア状態検出手段と、この先行エリア状態検出手段により検出された先行エリアの状態に応じて車両を制御する車両制御手段とを備えた車両用制御装置において、車両に発生するピッチング量を検出するピッチング量検出手段と、このピッチング量検出手段により検出されたピッチング量に応じて、レーダの照射角を制御する照射角制御手段とを備えている。
(もっと読む)
坂道発進補助方法及びそれに関連する装置
本発明は、ブレーキ圧力(PF)を供給するブレーキシステム(220)を用いて、静止位置に維持された車両の坂道発進を補助する方法に関する。前記ブレーキシステム(220)は、ブレーキペダル(200)を介してユーザ(U)により伝達される圧力(PMC)によって制御されるマスターシリンダ(210)に接続されている。本発明は、本方法が、圧力センサ(220)によりブレーキペダル(200)からの圧力(PMC)の解放が検知(20)されると実行される以下のステップ、すなわち、タイムアウトを始動するステップ(30)と、車両を静止位置に維持するための最小圧力(PMτ)を計算するステップ(40)と、ブレーキシステム(220)を用いてブレーキ圧力(PF)を調整することにより、ブレーキシステム(220)のブレーキ圧力(PF)を徐々に低下させるステップ(50)であって、前記システムが圧力調整装置として機能し、遅くともタイムアウトの終わりに、ブレーキ圧力(PF)が、車両を静止状態に維持するための最小圧力(PMτ)と少なくとも等しいターゲット圧力(PC)に等しくなるステップを含むことを特徴とする。 (もっと読む)
補助ブレーキ制御装置
【課題】 簡単且つ安価な構成としながら、車両の減速度を所定に維持しつつ、多様化する細かな要求に応えることができる補助ブレーキ制御装置を提供する。
【解決手段】 S2で補助ブレーキを選択する際に、S60で使用を制限された補助ブレーキを考慮して、実際の車両減速度を目標減速度に近づけることができる最適な補助ブレーキを、補助ブレーキ装置3(エンジン・リターダ4、排気ブレーキ5、ドライブライン・リターダ6、或いはこれらの組み合わせ)の中から選択する。S3では静穏性の要求が低いためS2で選択された補助ブレーキAを作動させ、S4では静穏性の要求が比較的高いためS2で選択された補助ブレーキBを作動させ、S5では静穏性の要求が高いため補助ブレーキを作動させることなく本フローチャートを終了する。
(もっと読む)
車両用制動制御装置
【課題】作動原理の異なる負圧助勢とポンプ助勢とを組み合わせることにより発生する運転者のブレーキ操作に対する違和感を抑制できる車両用制動制御装置を提供すること。
【解決手段】この装置は、バキューム式ブースタを利用した制動操作の助勢(負圧助勢、Ch2)に加えて、液圧ポンプと電磁弁とにより調整される助勢液圧(マスタシリンダ圧に加算される圧力)を利用した制動操作の助勢(ポンプ助勢、Ch5)を行う。ポンプ助勢は、制動操作量が微小値(「0」を含む)に達した時点から開始される。このため、ポンプ助勢と負圧助勢とが略同時に開始されるから、それらの繋ぎ目が存在しない。従って、作動原理が異なる助勢作用を組み合せても制動操作に違和感がない。バキューム式ブースタVBのジャンプイン(ジャンピング)特性を考慮する場合、ジャンプインに合せてポンプ助勢を開始することもできる。
(もっと読む)
連結式車両用電子防止機構
【課題】連結車両におけるジャックナイフ現象などの兆候を検出し様々な防止処置が取れるシステムを提供する。
【解決手段】連結式車両用電子防止システムは、第1のヨーイング軸周りの牽引部分のヨーイング回転速度を検出するように構成された牽引部センサ108と、第2のヨーイング軸周りの被牽引部分のヨーイング回転速度を検出するように構成された被牽引部センサ106と、牽引部センサ108および被牽引部センサ106に接続された処理装置110とを備え、処理装置110が、牽引部センサ108および被牽引部センサ106から受信したデータに少なくとも部分的に基づいて、いつ修正制御を開始するかを決定する。
(もっと読む)
車両用発進補助装置
【課題】 簡単且つ安価な構成でありながら、より一層運転者の意思に沿った違和感の少ない発進補助を実現可能な車両用発進補助装置を提供することを目的とする。
【解決手段】 S4でブレーキペダル11が所定に踏まれていると判断すると、S5でクラッチストローク・センサ2の検出信号に基づいてクラッチペダルがブレーキ圧保持開始点まで踏み込まれたか否かを判断し、YESの場合にはS6でブレーキ圧を保持する。その後、クラッチペダルがブレーキ圧解除点まで戻された場合には、S8でブレーキ圧を解除してサービスブレーキ装置の制動力を解除する。なお、S4では、サービスブレーキ・トロークセンサ3の検出値と比較して所定にブレーキペダル11が踏み込まれているか否かを判断するための判断基準値(ブレーキペダルストローク閾値)を車両走行路面の勾配に応じて変更するように構成されている。
(もっと読む)
車両走行路判別装置
【課題】車両が走行している路面状態を精度良く判定する。
【解決手段】車両走行路判別装置において、推定加速度演算部104は、車両を走行させるための駆動源の出力に基づいて車両に発生していると推定される推定加速度Geを演算する。実加速度演算部105は、車両に実際に発生している実加速度Gxを算出する。路面状態判定部106は、推定加速度と実加速度との関係に影響を与える車両状態に応じて推定加速度Geを補正して補正後推定加速度Gaを取得し、補正後推定加速度Gaと実加速度Gxとを比較して路面状態を判定する。
(もっと読む)
自動ブレーキ装置
【課題】車両の各種安全装置から出される制動要求に対して、制動特性の異なる複数の自動ブレーキ装置を適宜作動させる。
【解決手段】車両VLは、各車輪4FR〜RLに油圧ブレーキ装置2と、後輪を制動する電動パーキングブレーキ3とを備えている。ブレーキ制御ECU1は、各種センサ8からの検出値および渋滞追従制御ECU71、車間制御ECU72、居眠り防止ECU73、・・・などの安全装置からなる制動要求出力手段からの制動要求を車内LANバス6を介して入力し、車速その他の車両状態に応じて制動要求の大きさを判定し、その判定結果に基づいて油圧ブレーキ装置2および電動パーキングブレーキ3を同時または切換えて作動する作動信号を出力する。
(もっと読む)
車両用駆動装置の制御装置
【課題】駆動輪の回転方向が走行ポジションでの回転方向とは反対の回転方向とされたとしても第1電動機が高回転となることを抑制することができる車両用駆動装置の制御装置を提供する。
【解決手段】駆動輪34がシフト操作装置50にて選択されている走行ポジションでの回転方向とは反対の回転方向となるときには、逆駆動力抑制手段86により出力軸22や駆動輪34等の自動変速部20の出力側から差動部11へ入力される逆駆動力が抑制されるので、伝達部材18が設定されている走行ポジションでの回転とは反対方向に回転駆動されることが抑制されることから、差動部11における相互の相対回転速度の関係からエンジン回転速度NEや伝達部材回転速度N18によって決められる第1電動機回転速度NM1が高回転となることを抑制することができる。これにより、第1電動機M1の耐久性が向上する。
(もっと読む)
軌道上移動体制御装置および進出方向検出装置
【課題】GPS観測を利用した軌道上を移動する移動体制御において、観測誤差により隣接する他の軌道に存在する移動体や停止目標による誤警報、誤ブレーキを回避する。
【解決手段】移動体制御装置100を、コントローラ108、GPS受信機113、他移動体の移動体制御装置と送受信する無線機115、ブレーキ107及び警報ユニット109を備えて構成し、コントローラを自移動体が走行している線別、線路名称等の軌道情報を記憶する手段及び他移動体又は停止目標と自移動体の軌道情報を比較する手段を備えて構成した。
(もっと読む)
車両の制動方法
【課題】常用制動装置の比較的僅かな摩耗で、車両の効果的な制動を行う。
【解決手段】常用制動装置の作動量(B)が検出され、目標運動量(SBW)に達するため、車両の縦加速度の減少を必要とする実際運動量(IBW)と目標運動量(SBW)との運動量偏差があると、作動量(B)及び実際運動量(IBW)と目標運動量(SBW)との運動量偏差(ΔBW)に関係して、付加的に常用制動装置が車両の縦加速度を減少するように動作せしめられる。
(もっと読む)
自動車の流体式リターダを調整し作動させるための方法および装置
本発明は、自動車の流体式リターダ(1)を調整し作動させるための方法であって、調節可能な油圧回路(15)とこの油圧回路(15)内の油圧圧力を検出するための手段とをリターダ(1)が有し、所定の制動トルク特性曲線に追従する制動トルクを生成するための少なくとも1つの予調整が行われ、この予調整が制御調節ユニット(6)内に持続的に格納され、この予調整に基づいてリターダ(1)が走行運転時に作動するものに関する。このリターダの制動トルクの調整精度を改善するために、少なくとも予調整時にリターダ(1)の油圧回路(15)内の油圧圧力が考慮されるようになっている。設けられている装置ではさらに、少なくとも1つの圧力センサ(9)を備えた調節可能な油圧回路(15)をリターダ(1)が有し、この油圧回路(15)に制御調節ユニット(6)が付設されており、この制御調節ユニットが不揮発性データ記憶装置とプロセッサユニットとを有し、このプロセッサユニット内で実際の入力データと記憶されたデータが処理可能であり、またこのプロセッサユニット内で、処理されたデータから、リターダ(1)の電気弁機構(13)および/または油充填機構を作動させるための出力信号が発生可能であり、所定の目標制動トルク(Msoll)がこれらの機構を介して調整可能である。 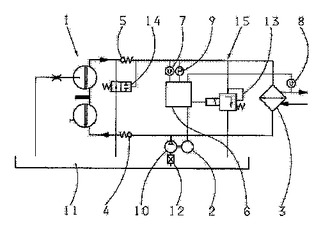 (もっと読む)
(もっと読む)
41 - 60 / 66
[ Back to top ]