
Fターム[3D246JA12]の内容
ブレーキシステム(制動力調整) (55,256) | 目標制御量 (1,430) | 車輪に関するもの (718) | ホイールシリンダ圧、制動力、制動トルク (546)
Fターム[3D246JA12]に分類される特許
21 - 40 / 546
車両用ブレーキ液圧制御装置
【課題】前輪用の車輪ブレーキおよび後輪用の車輪ブレーキに作用せしめるブレーキ液圧を個別に増減調整可能な液圧調整ユニットの作動を、同軸上にある左右の前輪および後輪用の車輪ブレーキのブレーキ液圧間で許容される許容差圧となるように制御する車両用ブレーキ液圧制御装置において、路面の摩擦係数に安定して対応した許容差圧が得られるようにする。
【解決手段】制御対象の車輪と同軸上にある他の車輪の車輪ブレーキのアンチロックブレーキ制御に伴う減圧開始時の液圧であるロック液圧をロック液圧取得手段29が取得し、許容差圧設定手段27は、少なくともロック液圧取得手段29で得たロック液圧に基づいて路面摩擦係数に対応した許容差圧を設定する。
(もっと読む)
車体挙動安定化装置

【課題】制動制御装置および駆動制御装置を用いた車体挙動安定化装置において、車体挙動安定化制御用のアクチュエータが異常となったときに車体挙動を安定化させる。
【解決手段】モータ・ジェネレータ5および/またはエンジン8の駆動力を制御することで第1の車体挙動安定化制御を実行する駆動制御指令部36と、ブレーキアクチュエータ12c〜12fを駆動制御して前後左右の車輪2・3の制動力を独立制御することで第2の車体挙動安定化制御を実行する制動制御部35と、ブレーキアクチュエータの異常を検出する異常検出部37とを備えた車体挙動安定化装置1において、異常検出部37がブレーキアクチュエータの異常を検出した場合、制動制御部35が2の車体挙動安定化制御を停止するとともに、駆動制御指令部36に対して車体挙動安定化制御の実行指令を出力し、駆動制御指令部36が単独で第1の車体挙動安定化制御を実行するようにする。
(もっと読む)
車両の運動制御装置
【課題】
日常運転領域から稼動するハンドル操作に連係した加減速を自動的におこない、限界運転領域で横滑りを確実に低減させるという、違和感が少なく、安全性能向上を可能とする技術および装置を提供する。
【解決手段】
前輪及び後輪の駆動力又は/及び制動力を制御可能な車両の運動制御装置において、横軸に車両の前後加速度、縦軸に車両の横加速度をとるダイアグラムを定義したときに、時間の経過とともに当該ダイアグラム上で曲線的な遷移をするように加減速制御指令を決定するコントローラと、加減速制御指令に基づいて、制動力又は/及び駆動力を決定する制動力駆動力配分部と、を有する。
(もっと読む)
車載電子制御装置
【課題】ペダルの踏み間違いを検出するための判定条件を運転者に応じて適切に設定する
【解決手段】車両制御システム1では、自車両に取り付けられたブレーキペダルが踏み込まれておらず且つ自車両に取り付けられたアクセルペダルが踏み込まれていない状態(以下、両ペダル非踏込状態という)から、ブレーキペダルまたはアクセルペダルが踏み込まれた状態に移行した時点における、自車両と自車両の前方を走行する先行車両との間の車間距離(以下、先行車間距離という)を学習し、この学習結果と、アクセルペダルが踏み込まれた時点(以下、アクセル踏込時点という)での先行車間距離(以下、アクセル踏込時車間距離という)とを比較することによって、アクセル踏込時点におけるアクセルペダルの操作が間違いであるか否かを判断する。
(もっと読む)
車両の走行制御装置
【課題】
勾配のある走行路上で停止して発進する際に、運転者が感じる操縦安定性の低下を回避する。
【解決手段】
制動力制御手段(21)と、制動力制御手段を介して車両を停止状態に保持する停止保持制御手段(11)と、駆動力制御手段(23)と、乗員による発進操作を検出する発進操作検出手段(13)と、走行路の勾配を取得する手段(17)と、発進制御手段(13)と、を備え、発進制御手段は、停止保持制御手段により車両が停止状態に保持されている間に発進操作が検出されると、走行路の下り方向に向かう力と駆動力とを釣り合わせて車両の移動を抑制するための目標駆動力を算出し、前記制動力の解除が終了するまで当該目標駆動力による駆動状態を維持し、制動力の解除に応じて駆動力を増加させて車両を発進させる。
(もっと読む)
車両用ブレーキ装置の制御装置
【課題】倍力制動装置を小型化しつつ、倍力制動装置で発生できる制動力以上の制動力を得られるようにする。
【解決手段】ブレーキ操作量が増大する要求制動力の増大時に、要求制動力が、ポンプで制動用液圧を発生する車輪別制動手段によるポンプアップ許可制動力を超えたときに、該ポンプの駆動を開始し、要求制動力が倍力制動装置で発生される制動用液圧(マスタ圧)の上限値付近に設定された設定値に達したときに、マスタ圧を前記ポンプで昇圧した制動液圧をホイールシリンダに供給するポンプアップ制御を行う(S3,S4,S6,S7,S8)。
(もっと読む)
車両の制動制御装置
【課題】機械式ブレーキによる制動トルクの応答遅れに拘らず合算トルク(MGトルク+ECBトルク)が適切に制御されるようにしてすり替えショックを抑制する。
【解決手段】すり替え過渡時に車両の制動トルクT2が要求制動トルクT1からずれた場合に、そのずれ(制動トルク偏差ΔT)が小さくなるようにモータジェネレータMGによる制動トルク(MGトルク)がフィードバック補正されるため、油圧ブレーキ62による制動トルク(ECBトルク)の応答遅れに拘らず要求制動トルクT1に応じて合算トルク(MGトルク+ECBトルク)が適切に制御されるようになり、車両の制動トルクT2の瞬間的な低下によるすり替えショックが抑制される。特に、モータジェネレータMGによる制動トルク(MGトルク)は応答性に優れているため、油圧ブレーキ62による制動トルク(ECBトルク)の応答遅れに拘らずすり替えショックを適切に抑制することができる。
(もっと読む)
車両停止判定装置
【課題】 精度良く車両停止状態を判断可能な車両停止判定装置を提供すること。
【解決手段】 本発明の車両停止判定装置にあっては、運転者の操作以外によってエンジンの停止・再始動が行われる動力源と、従動輪及び駆動輪の車輪速を検出する車輪速検出手段と、前記車輪速検出手段により検出された従動輪車輪速が回転停止を第1所定時間以上継続し、かつ、駆動輪車輪速が回転停止を前記第1所定時間より長い第2所定時間以上継続したときは車両停止と判定する車両停止判定手段と、を備えた。
(もっと読む)
車両の制御装置
【課題】車両がストール状態のときに電動機に駆動電流を供給する電源電力供給回路の負担を軽減するとともに、ブレーキ装置の状態に関わらず安定的に車両の後退を抑制して、商品性の向上を図ることができる車両の制御装置を提供する。
【解決手段】ストール状態であると判定された状態で、電源電力供給回路の温度が所定値以上の温度に上昇したときに、電動機の出力トルクを減少させるようにモータトルク指令値を生成すると共に、ブレーキ装置の制動力を、電動機の出力トルクの減少分と等価な制動力で増加させるようにブレーキトルク指令値を生成する処理を実行すると共に、該ブレーキトルク指令値を生成する処理を実行しているときに車両の後退が検出された場合に、車両が後退しなくなるまでブレーキトルク指令値を補正する。
(もっと読む)
車両の制駆動力制御装置及び制駆動力制御方法
【課題】段差を通過して間もない位置に車両を停止する必要があっても、急な速度変化が発生することを抑制可能とすることを目的とする。
【解決手段】車両の制動力及び駆動力を制御して、取得した目標位置に車両を誘導または駐車する車両の制駆動力制御する際に、段差を通過する際に生じる目標位置に対する車両の相対速度の変動に応じて駆動力指令値を増大する。但し、上記段差を乗り越えるために、当該段差に接触した車輪の上方への変位である車輪の浮き上がりと判定すると、上記付加駆動力分の指令値が小さくなるように、上記駆動力指令値の上昇を抑制する。そして、駆動力指令値の抑制中に制動指令を制動装置に出力する。
(もっと読む)
ブレーキ制御装置
【課題】
ドライバの違和感を抑制することができるブレーキ制御装置を提供すること。
【解決手段】
ドライバによるブレーキペダル2の操作に対してマスタシリンダ4の圧力の上昇が抑制される無効ストローク動作中に、マスタシリンダ4内のブレーキ液を用いてホイルシリンダ5の圧力を調整する際、マスタシリンダ4とホイルシリンダ5を接続する第1ブレーキ回路(供給通路11)上に設けられたノーマルオープン型の電磁弁(ゲートアウト弁20)に対し、弁体200が閉弁する所定電流Iinitialを通電する第1通電部71と、第1通電部71による通電後、連続して所定電流Iinitialより低い電流Ibalance(t)を通電する第2通電部72と、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)へ漸近させて移行する移行通電部73とを備えた。
(もっと読む)
ブレーキ制御装置
【課題】 回生制動力を有効に行うことができるブレーキ制御装置を提供すること。
【解決手段】 回生制動装置の作動時にポンプによってリザーバ内に貯留したブレーキ液をホイルシリンダへ送る回生協調増圧制御部と、回生制動装置の作動時にホイルシリンダに送られたブレーキ液をポンプアウト弁を経由しポンプを介してリザーバへ流入させる回生協調減圧制御部とを設けた。
(もっと読む)
電動油圧式ダイナミックブレーキシステムおよび制御方法
【課題】ダイナミック動作する電動油圧式ブレーキシステムの簡素化。
【解決手段】第1のチャンバ122とブレーキ液リザーバ14との間の接続部は、電磁弁50を備えている。制御回路40は、選択または指定された制動モードに従ってリザーバ14の電磁弁50と高圧畜圧器60の電磁弁70とを制御する。ダイナミック制動段階は、閾値速度に減速するまで車輪ブレーキFR1−4からマスタシリンダ10を遮断しながらエネルギー回生を伴うステップと、その後、停止まで第1のチャンバ122だけを高圧畜圧器60とESPモジュール30とに接続することによって、高圧畜圧器60の加圧下で上記モジュールにブレーキ液を供給するとともに、機械的な制動のために車輪ブレーキFR1−4を供給するステップとの2つのステップに分けられる。
(もっと読む)
車両のブレーキ制御装置
【課題】 作動液の脈動が発生した場合に、ブレーキ操作フィーリングを成立させながらリニア制御弁の過度の作動を抑えて信頼性を確保する。
【解決手段】 作動液の液圧が低い場合には、液圧の脈動振幅が小さくなるという特性がある。また、作動液の液圧が低い場合には、液圧剛性が低くなってブレーキ応答が遅れる。そこで、作動液の脈動が発生した場合には、検出液圧の脈動の中心値を表す液圧Pxaveに基づいて、液圧Pxaveが低い場合には高い場合に比べて小さな制御開始閾値Xを設定する。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うと共に、アクチュエータの耐久性の低下を抑制する。
【解決手段】車体の上下挙動を取得し、取得した上下挙動が閾値th1よりも大きいときに、上下挙動に応じて目標制動力Pbを制御する。また、取得した上下挙動が閾値th2(th2>th1)よりも大きいときに、目標制動力Pbを0に制限する。また、減速感を抑制するために、目標制動力Pbを上限値Pmax以下に制限すると共に、立ち上げ時には演算周期毎の増加量をΔPu以下に制限する。その後は、上下挙動の低減に伴って、目標制動力Pbを減圧させてゆく。このときは、制動力の消失感を抑制するために、演算周期毎の減少量をΔPd以下に制限する。
(もっと読む)
自動走行制御装置
【課題】運転者の自動走行運転への適正な関わりを検出するとともに、運転者の自動走行運転に対する監視放棄を抑制することのできる自動走行制御装置を提供すること。
【解決手段】自動走行制御中の第1所定時間経過後に(S1)、車速を自動走行制御に基づく目標車速から運転監視確認用車速に減速させ(S2、S3)、所定期間内に運転者の反応が検出されなかった場合には(S4〜S9)、運転者への警告を発するとともに自動走行制御を停止する(S10)。
(もっと読む)
電動パーキングブレーキ制御システム
【課題】部品点数を増加させることなく、温度に応じた目標荷重値を設定することができる電動パーキングブレーキ制御システムを提供することを目的とする。
【解決手段】車両の車輪を制動するパーキングブレーキと、前記パーキングブレーキをコントロールケーブルを介して作動または解除するアクチュエータと、外気温センサと、荷重センサと、前記アクチュエータを制御する制御部とを備えた電動パーキングブレーキ制御システムであって、前記制御部は、連続する複数の温度領域に区分された温度領域情報に基づいて、前記外気温センサからの外気温の時系列において、前記パーキングブレーキの作動より以前の所定時間内における外気温が属する温度領域のうちの低温度側の温度領域を特定し、特定された温度領域に応じた目標荷重値まで到達するように前記アクチュエータの駆動を制御することを特徴とする電動パーキングブレーキ制御システムを用いる。
(もっと読む)
車両制御装置、および車両制御プログラム
【課題】車両の危険状態を抑制するための車両制御装置において、運転者がアクセルとブレーキとを踏み間違えたときに、車速が大きくなる前に危険状態を抑制できるようにする。
【解決手段】誤操作防止システムを構成する制御部は、アクセルの操作量の情報を示すアクセル情報を繰り返し取得し、アクセル情報に基づいて、アクセルの操作量が、予め設定された減少判定時間以内に減少閾値以上減少し、その後、予め設定された増加判定時間以内に増加した場合、運転者がアクセルとブレーキとを踏み間違えたものと判断する(S150、S160)。そして、踏み間違いと判断された場合、当該車両の加速を抑制する(S290)。このシステムによれば、アクセルの操作量が減少後に増加すれば直ちに当該車両の加速を抑制することができるので、車速が大きくなる前に加速を抑制することができる。
(もっと読む)
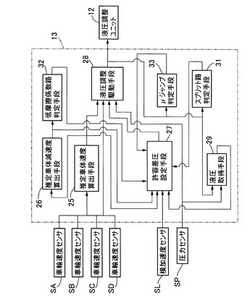
発進補助装置およびこれを搭載した発進補助車両
【課題】車高が変化した場合であっても車体の傾斜状態から路面の傾斜状態を適正に推定して確実に発進補助を行う。
【解決手段】ブレーキペダル9に対する操作に応じて制動力を発生するディスクブレーキ8と、車体1の前後加速度G(傾斜状態)を検出する前後Gセンサ14と、前後Gセンサ14の検出結果に基づいて路面の傾斜度合いB’を推定する路面状態推定部45と、路面の傾斜度合いB’に基づいて路面が坂道であると判定された場合、ブレーキペダル9に対する操作の解除後にもディスクブレーキ8に制動力を保持させる発進補助装置11において、エアスプリング5のストロークSを検出するストロークセンサ18を更に備え、路面状態推定部45が、前後加速度Gに基づく路面(車体)の傾斜度合いBをストロークSを用いて補正することで路面の傾斜度合いB’を正確に推定できるようにする。
(もっと読む)
車両用制御装置
【課題】道路の一区間(学習対象区間)の走行により得られる回生エネルギー量を精度良く推定することができる車両用制御装置を提供する。
【解決手段】学習手段70は、前記回生エネルギー学習制御において、車両6が道路の一区間である学習対象区間を走行しているときに蓄電装置56が少なくとも一時的に満充電状態であった場合には、学習データとして記憶する回生エネルギー量EGYrsを、蓄電装置56が終始満充電状態ではなかったと仮定して算出する。従って、蓄電装置56が満充電状態であればそのときの実際の回生エネルギー量EGYrsは零又は略零であるところ、そのように回生エネルギー量EGYrsが零又は略零であるとしては前記学習データは記憶されず、推定回生エネルギー量EGYersを精度良く推定するのに適した前記学習データを記憶することが可能である。
(もっと読む)
21 - 40 / 546
[ Back to top ]