
Fターム[3D246JA12]の内容
ブレーキシステム(制動力調整) (55,256) | 目標制御量 (1,430) | 車輪に関するもの (718) | ホイールシリンダ圧、制動力、制動トルク (546)
Fターム[3D246JA12]に分類される特許
81 - 100 / 546
車両用液圧発生装置
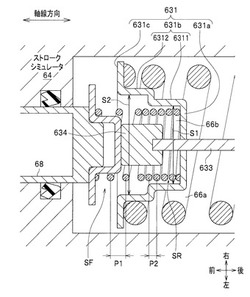
【課題】本発明は、セット荷重のバラツキを低減することができる反力付与手段を有する車両用液圧発生装置を提供することを課題とする。
【解決手段】本発明は、運転者の操作に応じて液圧を発生させる液圧発生手段と、前記液圧発生手段と連通して反力を付与する反力付与手段(ストロークシミュレータ64)と、を備える車両用液圧発生装置において、前記反力付与手段は、前記液圧発生手段からの吐出液圧に応じて作動するシミュレータピストン68(ピストン部材)と、前記ピストン部材に当接して反力を付与する第2リターンスプリング66b(ばね部材)と、を有し、前記ばね部材は、不等ピッチであることを特徴とする。
(もっと読む)
制動力制御装置

【課題】マスタシリンダ圧センサを必要としない制動力制御装置を提供する。
【解決手段】マスタカット弁41は、磁性体(プランジャ)101と、コイル102と、スプリング103と、を備える。磁性体101は、第1液圧配管38と連結通路43との液圧差に応じた差圧作用力が開弁する方向に作用される。コイル102は、磁性体101が動くことにより、誘導起電力が発生する。誘導起電力は液圧が変化した際、特に運転者がブレーキペダル31を操作した際、コイル102に電磁誘導により電流が流れるようになっている。ブレーキペダル31を操作したことにより発生した電流をブレーキ液圧に換算して制動装置に導入する。これより、ブレーキペダル31によるブレーキ液圧を制動力制御装置に導入することができる。
(もっと読む)
車両の制動制御装置
【課題】要求制動トルクをMGトルクおよびECBトルクの両方で分担するとともに、車両の停止直前にMGトルクをECBトルクに振り替える場合に、MGトルクによる制動をできるだけ低車速まで実施できるようにする。
【解決手段】要求制動トルクがモータジェネレータMGのMGトルクと油圧ブレーキ62によるECBトルクとの両方で分担されるが、車両の停止直前にMGトルクをECBトルクに振り替える際には、ECBトルクを漸増させるとともに、そのECBトルクの増加に対応してロックアップクラッチ30のL/Uクラッチトルクを漸減し、且つ、MGトルクをL/Uクラッチトルク以上に保持しながら漸減する。MGトルクの振り替えと並行してL/Uクラッチトルクが漸減されるため、MGトルクの振替制御の開始時間をそれだけ遅く(低車速)することが可能で、MGトルクの回生制御を低車速まで実施できるようになり、エネルギー回収効率が向上する。
(もっと読む)
ブレーキ制御装置およびブレーキ制御方法
【課題】走行条件や車両条件に応じてブレーキ力を制御し、滑走の発生頻度を低減させることを可能とするブレーキ制御装置およびブレーキ制御方法を得ること。
【解決手段】複数の車両により構成される列車を制動させるブレーキ力を演算するブレーキ力演算部5と、車両の車輪の滑走を検知した際の車両のブレーキノッチ位置および走行速度を含む走行情報、および滑走情報を記録し、走行情報と滑走情報とに基づいて滑走予測を行い、ブレーキ力に対する車両毎、台車毎、あるいは軸毎の分担ブレーキ力の割合を示すブレーキ分担率を演算する滑走抑制制御部12と、ブレーキ力とブレーキ分担率とに基づいて分担ブレーキ力を設定し、基礎ブレーキ装置にブレーキ制御信号を出力するブレーキ力設定部6と、を備える。
(もっと読む)
車両の制御装置
【課題】リチウムイオン二次電池を搭載した車両において、Li析出を抑制するための制御を実行した上で、回生発電による回収エネルギを確保しつつ車両制動力の瞬間的な変動によって車両運転性が低下しないようにする。
【解決手段】HV−ECU302は、リチウムイオン二次電池であるバッテリ18におけるLi析出を抑制するために、バッテリ18の充放電履歴に基づいて充電電力上限値を調整する。さらに、HV−ECU302は、調整された充電電力上限値の範囲内でブレーキペダル操作に対応した要求制動力に対する、制動装置10による液圧制動力と、第2MG60による回生制動力との分担を決定するブレーキ協調制御を実行する。Li析出を抑制するために充電電力上限値を制限する際における充電電力上限値の制限度合は、制動装置10に液圧を供給するためのブレーキ液圧回路80での液圧応答レートの検出値に応じて可変に設定される。
(もっと読む)
車両の制御装置
【課題】回生不能の場合においても、実液圧と目標液圧制動力とのずれを、補償するのに好適な車両の制御装置を提供する。
【解決手段】液圧制動装置により発生させる目標液圧制動力を算出する目標液圧制動力算出手段と、液圧制動装置の実液圧を検出する実液圧検出装置と、実液圧から実液圧制動力を算出する実液圧制動力算出手段と、液圧制動装置を制御して前記目標液圧制動力よりも大きな制動力を発生させた場合の実液圧制動力と目標液圧制動力とのずれを、第1モータを用いて補償する補償装置20とを備える。
(もっと読む)
アクセルペダル誤操作対応装置およびアクセルペダル誤操作対応装置用のプログラム
【課題】アクセルペダル誤操作を検出して車輪にブレーキトルクを発生させる技術において、ドライバがステアリングを適切に操作できない場合でも、車両が危険領域に進入してしまう可能性を従来よりも低減する。
【解決手段】アクセルペダルの誤操作を検出したとき、現在のタイヤ舵角で左側制動輪および右側制動輪にブレーキトルクを発生させたときに車両が安全領域から逸脱すると判定した場合には、車両の右側制動輪のみまたは左側制動輪のみにブレーキトルクを発生させる。これにより車両は、左右の両制動輪にブレーキトルクを発生したときの軌跡よりも、右側または左側にカーブする。
(もっと読む)
電気自動車
【課題】 モータが制御系のノイズ等で誤動作した場合に、瞬時にこれを判断して安全処置を採ることができる電気自動車を提供する。
【解決手段】 ECU21の出力するトルク指令と、モータ6またはこのモータ6で駆動される車輪2,3の回転信号、回転方向信号、およびモータ電流のいずれかとを常時監視し、この監視した情報を基に、定められた規則に従ってモータ6の誤動作を検出する誤動作検出手段37を設ける。この誤動作検出手段37で誤動作が検出されると前記モータ6への駆動電流の停止、および機械式ブレーキ9,10による制動のいずれかまたは両方を行わせる誤動作対応制御手段38を設ける。
(もっと読む)
気圧式倍力装置
【課題】気圧式倍力装置において、回生協調時にブレーキペダルの反力の変動を軽減して操作フィーリングを改善する。
【解決手段】ブレーキペダルで入力ロッド133を操作し、制御バルブ132で変圧室108に大気を導入し、パワーピストン106の推力によりマスタシリンダ110でブレーキ液圧を発生させる。液圧の反力の一部をリアクション部材155を介して入力ロッド133に伝達する。入力ロッド133が非作動状態から所定位置に前進するまで、制御バルブ132により変圧室108に大気を導入せず、リアクション部材155の反力を入力ロッド133に伝達せず、マスタシリンダ110で液圧を発生しない。このとき、液圧制御装置でブレーキ液圧を発生して回生協調制御を行ない、戻しバネ140及び反力調整バネ158によって入力ロッド133に反力を付与する。液圧制御装置の作動によるマスタシリンダ110の液圧の変動が入力ロッド133に伝達されない。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】車両が横転しそうなときの姿勢の安定性をより向上させる。
【解決手段】同一軸上に設けられた左右の車輪を個別に制動可能に構成され、旋回中に横転傾向が検知されると車輪を制動して横転抑制制御を実行する車両用ブレーキ液圧制御装置であって、横転抑制制御部120は、横転傾向が検知された場合に、旋回外輪に第1の制動力で制動を行うと同時に、同一軸上の旋回内輪に第1の制動力よりも小さい第2の制動力で制動を開始する。
(もっと読む)
車両の制御装置
【課題】アクセルとブレーキの両方が踏み込まれた状態になった場合にエンジンの出力を制限する出力制限制御を実行する車両において、道路状況に応じた適正な条件で出力制限制御を実行して、安全性を向上させることができるようにする。
【解決手段】距離センサ35やナビゲーション装置34からの情報に基づいて、前方の車両又は障害物までの距離が所定値以下と判定された場合、次のカーブまでの距離が所定値以下と判定された場合、走行道路の曲率半径が所定値以下と判定された場合、走行道路の下り勾配が所定値以上と判定された場合、次の交差点までの距離が所定値以下と判定された場合のいずれかの場合には、速やかに減速する必要がある道路状況であると判断して、出力制限制御が通常よりも早めに実行されるように出力制限制御の実行条件を変更すると共に、出力制限制御の実行中の車両の減速度を大きくするように制御条件を変更する。
(もっと読む)
車両用制動制御装置
【課題】駆動液圧室の液圧の応答性を高めつつ、反力液圧室の液圧の制御性を高める簡素な構成の車両用制動制御装置を提供すること。
【解決手段】液圧ポンプ39から吐出されて逆止弁Va,Vbを通過するブレーキ液を、リニア弁V1,V2でその流入出を調整しながら、アキュムレータ40と駆動液圧室27とに供給することで、アキュムレータ40を加圧し、駆動液圧室27に所定の液圧を得る。また、液圧ポンプ39からの逆止弁Va,Vbの間の部分を通過するブレーキ液を、リニア弁V3,V4でその流入出を調整しながら、反力液圧室28へ供給することで、反力液圧室28に所定の液圧を得る。
(もっと読む)
回生制動制御装置
【課題】回生式制動装置を備える車両において回生効率を向上させる。
【解決手段】回生制動制御装置24は、車両の前輪に回生制動力を伝達可能な第1回生制動手段56f、及び車両の後輪に回生制動力を伝達可能な第2回生制動手段56rの各々を制御する回生制動制御装置であって、第1回生制動手段及び第2回生制動手段の各々に要求される回生制動力の合計値である要求回生制動力を算出する要求回生制動力算出手段と、要求回生制動力を、第1回生制動手段及び第2回生制動手段で配分して実現する場合のエネルギ損失が、最も小さくなる配分比を算出する配分比算出手段と、算出された配分比で要求回生制動力を実現するように、第1回生制動手段及び第2回生制動手段を夫々制御する制御手段とを備える。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】車両の走行状態に応じた挙動制御をより適切に行うこと。
【解決手段】車速を取得する車速取得手段と、車体の上下挙動を取得する上下挙動取得手
段と、前記上下挙動取得手段が取得した車体の上下挙動の最大値を取得する上下挙動最大
値取得手段と、前記上下挙動最大値取得手段が取得した上下挙動の最大値と、前記車速取
得手段が取得した車速とに基づいて、制動力の上限を示す上限指令値を設定する上限指令
値設定手段と、前記上下挙動最大値取得手段が取得した上下挙動の最大値と、前記上限指
令値設定手段が設定した前記上限指令値とに基づいて、制動力の指令値を設定する制動力
指令値設定手段と、前記制動力指令値設定手段が設定した制動力の指令値に基づいて、車
輪に対する制動力を付与する制動手段とを備える。
(もっと読む)
自動二輪車用ブレーキ装置
【課題】走行環境変化に対応した前後配分にすることができるブレーキ装置を提供することを課題とする。
【解決手段】第2モード第1区間の始点から第2モード第2区間の終点までの間の途中の点Pmで、操作量に対する前輪の制動力の増加率を、変化させる。点Pmまでの操作量の増加率は、曲線の傾きα1で表すことができる。点Pm以降の操作量の増加率は、曲線の傾きα2とする。好ましくは、α1<α2に設定する。
【効果】途中までの増加率より、途中以降の増加率を大きく設定することで、操作量に車体発生源速度を一次比例させることができる。操作量に車体発生源速度を一次比例させると、制動の初期(操作量が小さいとき)においては姿勢制御優先で前後輪の制動力の変化量を小さくすることができ、制動の後半(操作量が大きいとき)においては制動作用が優先される。
(もっと読む)
倍力装置及びこれを用いたブレーキ装置
【課題】倍力装置およびブレーキ装置において、回生協調時に液圧の変動による反力の変動を軽減してブレーキペダルの操作フィーリングを改善する。
【解決手段】ブレーキペダルで入力ロッド135を操作し、制御バルブ132で変圧室108に大気を導入し、パワーピストン106を推進してプライマリピストン160を前進させてマスタシリンダ110でブレーキ液圧を発生させる。液圧による反力の一部をリアクションディスク155を介して入力ロッド135に伝達する。プライマリピストン160に液圧を発生しない遊びストロークSを設け、反力調整バネ157Cによりプランジャ131に伝達する反力を制限する。遊びストロークSの領域で、液圧制御装置でホイールシリンダに液圧を供給して回生協調制御を行ない、反力バネ159による反力を入力ロッド133に付与する。これにより、液圧制御装置の作動によるマスタシリンダ110の液圧変動が入力ロッド135に伝達されない。
(もっと読む)
自動制動装置
【課題】運転者の加速意図に応じて、迅速に自動ブレーキの解除が可能な自動制動装置1を提供する。
【解決手段】運転者のブレーキペダル操作に依存しない制動力を自動的に発生させる自動制動装置1において、運転者のアクセルペダル操作により、発生していた制動力を減衰係数に応じて減衰させ解除する制御を行う制御手段2と、アクセルペダル操作に基づいて、車両を加速させようとする運転者の加速意図の程度を検出する加速意図検出手段8とを有し、制御手段2は、加速意図の程度に応じて減衰係数を減少させることで、制動力を速く減衰させ解除する。加速意図検出手段8が、アクセルペダル19の開度と、踏込速度と、踏込加速度の中の少なくとも1つが所定値以上であると判定した場合に、制御手段2は、減衰係数を減少させる。
(もっと読む)
電動パーキングブレーキ装置
【課題】運転者のアクセルペダルの操作を速やかに認識し、スロットルバルブの開き始めにおいて、車両の引きずり現象や発進直後の制動ショックを低減する電動パーキングブレーキ装置を提供する。
【解決手段】アクセルペダル操作量信号APSを用いてスロットルバルブの開き始めのタイミングに電動パーキングブレーキを解除する代わりに、アクセルペダルが踏み込まれていない時刻t1のタイミングでのアクセルペダル操作量信号APSを取得して、基準アクセルペダル操作量信号APS*とし、その後は、アクセルペダル操作量信号APSと基準アクセルペダル操作量信号APS*との比をアクセル操作係数KACとし、アクセル操作係数KACが閾値KAC*以上になったタイミングで電動パーキングブレーキを解除する。
(もっと読む)
ブレーキ制御装置
【課題】 運転者に違和感を与えることなくブレーキペダル操作量に応じた制動力を得ることが可能なブレーキ制御装置を提供すること。
【解決手段】 本発明では、ブースタの倍力が無効とされる第1のストローク領域を備えた液圧制御装置に、第1のストローク領域ではドライバ要求制動力を実現するようにホイルシリンダ圧の液圧サーボを行い、第2のストローク領域では、ストローク量に対応して設定された目標ホイルシリンダ圧と目標マスタシリンダ圧との関係を維持するようにポンプや制御弁を制御することとした。
(もっと読む)
車両用走行制御装置及び車両用走行制御方法
【課題】運転者の加減速操作や運転負荷を低減する。
【解決手段】運転者が加減速操作する一つのレバー100Aが中立位置から操作されたことを検出すると、車両MMに加速度若しくは減速度を付与すると共に、上記レバー100Aを中立位置に付勢して無操作状態では上記レバー100Aを中立位置に保持する保持機構100Bを備える。そして、本発明は、上記レバー100Aが中立位置にあることを検出すると、車両MMを停止可能な減速度GNを車両MMに付与する。
(もっと読む)
81 - 100 / 546
[ Back to top ]