
Fターム[3D246JA12]の内容
ブレーキシステム(制動力調整) (55,256) | 目標制御量 (1,430) | 車輪に関するもの (718) | ホイールシリンダ圧、制動力、制動トルク (546)
Fターム[3D246JA12]に分類される特許
41 - 60 / 546
ブレーキシステム
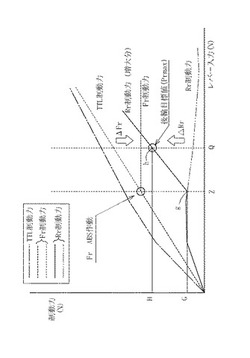
【課題】 連動ブレーキシステムとABSを採用した自動二輪車において、ブレーキレバーを単独操作して前輪ブレーキに制動力を発生させた状態で前輪ABSが作動したときの減速度を大きくする。
【解決手段】 ブレーキバイワイヤ方式の連動ブレーキシステムにおいて、ブレーキレバーのみから入力したとき前輪ブレーキに制動力を発生させるとともに、後輪ブレーキにも連動した制動力を発生させる。この状態で前輪ABSが作動すると、前輪ブレーキの制動力が一定となり、トータル制動力は.△Frだけ低下する。そこで、後輪側液圧モジュレータ22Rを駆動して、後輪ブレーキの制動力を理想配分特性によって定まるて後輪限界目標圧Prmaxに向けて増大させる。
(もっと読む)
車両用制御装置

【課題】道路の一区間(学習対象区間)の走行により得られる回生エネルギー量を精度良く推定することができる車両用制御装置を提供する。
【解決手段】学習手段70は、前記回生エネルギー学習制御において、車両6が道路の一区間である学習対象区間を走行しているときに蓄電装置56が少なくとも一時的に満充電状態であった場合には、学習データとして記憶する回生エネルギー量EGYrsを、蓄電装置56が終始満充電状態ではなかったと仮定して算出する。従って、蓄電装置56が満充電状態であればそのときの実際の回生エネルギー量EGYrsは零又は略零であるところ、そのように回生エネルギー量EGYrsが零又は略零であるとしては前記学習データは記憶されず、推定回生エネルギー量EGYersを精度良く推定するのに適した前記学習データを記憶することが可能である。
(もっと読む)
車両用制動支援装置
【課題】坂路にて自車両の停止中に自動制動の制動力を解除した際に、自車両の動作が運転者が意図しないものになることを防止する。
【解決手段】車両用衝突回避制動支援装置1は、障害物との接近に関するリスクポテンシャルを算出するリスクポテンシャル演算部31と、走行路の勾配を検出する外乱推定部32と、自車両が停止中に、リスクポテンシャルに基づき自車両に付与した制動力を解除する際のその減少度合いを、リスクポテンシャル及び走行路の勾配に基づいて変更する制動力演算部40とを備える。
(もっと読む)
車両挙動制御装置
【課題】応答性良く予備ブレーキ圧を印加すること。
【解決手段】前後の旋回外輪WFL,WRL(WFR,WRR)の内の少なくとも一方に制動制御量を発生させることで車両10の挙動を安定させる車両挙動安定化制御を行う場合、その制動制御量を前後夫々の旋回外輪WFL,WRL(WFR,WRR)に発生させる条件が成立した場合に、前後の旋回内輪WFR,WRR(WFL,WRL)の内の少なくとも一方に対して予備ブレーキ圧を印加すること。その予備ブレーキ圧の印加は、車両挙動安定化制御の実行中に今の車両10の旋回動作とは逆向きの操舵操作が検知されたときに実行する。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
車両制御装置
【課題】 ペダル吸い込まれ感をより低減できる車両制御装置を提供する。
【解決手段】 ブレーキペダルBPのストローク量を検出するストロークセンサ42と、ストローク量がSTrmax未満の場合、最大回生制動力Frmaxと等しい回生許容量Frstmaxにより制限された要求回生制動力Frreqを算出する第1回生制動力算出部32aと、ストローク量がSTrmax以上の場合、最大回生制動力Frmaxより小さい回生許容量Frstmaxにより制限された要求回生制動力Frreqを算出する第2回生制動力算出部32bと、要求回生制動力Frreqに基づいて実際に発生された回生制動力の検出値である実行回生制動力Frと液圧制動力との和が車両に必要な制動力である要求総制動力Freqとなるように、要求総制動力Freqと実行回生制動力Frとの差分を要求液圧制動力Fwcreqとして算出する制動制御部32cと、を有するBCU32を備えた。
(もっと読む)
車両用ブレーキ装置
【課題】一制動期間内でABS制御手段が作動し終了した後に再始動する見込みを増加させない範囲で回生制動力を発生し、従来よりも回生効率を向上した車両用ブレーキ装置を提供する。
【解決手段】液圧ブレーキ装置と、回生ブレーキ装置と、目標取得手段、協調制御手段、およびアンチロックブレーキ制御手段を有する制動制御装置とを備える車両用ブレーキ装置であって、制動制御装置は、ブレーキ操作部材が継続して操作されている一制動期間内でアンチロックブレーキ制御手段が作動したときに、ABS制御期間が終了して協調制御手段が再始動した時点(時刻t4)の目標制動力FRを回生許可制動力FHと演算する最終値演算手段と、一制動期間内でABS制御期間が終了して協調制御手段が再始動した(時刻t4)以降に作動し、目標制動力FRが回生許可制動力FH未満であるときにのみ回生制動力FEの発生を許可する回生許可手段と、をさらに有する。
(もっと読む)
車両用制動力制御装置
【課題】車両がスプリットμ路を走行する際の前一輪のアンチスキッド制御に起因して車両に作用する余分なヨーモーメントを低減しつつ、従来の制動力制御装置の場合に比して後輪の横力が不足する虞れを低減する。
【解決手段】必要に応じて各車輪の制動力を相互に独立に制御可能な制動装置を有する車両用制動力制御装置に係る。一方の前輪に於いてアンチスキッド制御が開始され(ステップ150)、左右の路面の摩擦係数が異なる走行路に関し予め設定された条件が成立していると判定されると(ステップ200)、一方の前輪とは左右反対側の前輪の制動力の増大を抑制すると共に、左右の後輪のうち少なくとも一方の前輪とは左右反対側の後輪の制動力の増大を抑制する(ステップ500又は700)。一方の前輪とは左右反対側の前輪の制動力の増大抑制度合は後輪の制動力の増大の抑制が行われない場合の抑制度合に比して小さい。
(もっと読む)
車両トレーラに接続される牽引車を制御する方法及びシステム
【課題】トレーラを牽引する牽引車を制御するための、改善された方法及びシステムを提供する。
【解決手段】車両トレーラ102に接続されている牽引車100を制御する方法、及び当該方法を使用するシステム。本方法は、車両目標のセット及び当該車両目標のセットに応答する車両状態のセットを検知することを含む。本方法は、車両目標のセットと車両状態のセットとの間の複数の差を求めること、当該複数の差の傾向を求めること、当該傾向に基づいて対称信号及び非対称信号のうちの少なくとも一方を生成すること、並びに、当該対称信号及び非対称信号のうちの少なくとも一方を用いて車両システムを作動させることも含む。
(もっと読む)
車両の回生ブレーキ制御装置
【課題】比較的高速から低速まで一定の踏み込み量のブレーキペダル操作で減速をしても違和感の無い減速を可能とし、ABS作動時の減速感の途切れを抑えて運転者の不安感を解消することができる車両の回生ブレーキ制御装置を提供すること。
【解決手段】ABS装置と液圧ブレーキ及び回生ブレーキを備えた車両の液圧ブレーキによって発生する液圧制動力と回生ブレーキによって発生する回生制動力をABSの動作と車速に応じて制御して運転者が要求する制動力を得るとともに、回生ブレーキは、アクセルペダルの開放状態が検知されると「アクセルOFF回生制動力」を発生させ、ブレーキペダルの踏み込み操作が検知されると「ブレーキON回生制動力」を発生させ、ABS作動時に前記回生制動力をABS非作動時のそれよりも下げるよう制御する車両の回生ブレーキ制御装置において、回生制動力の低車速域の値が高車速域の値よりも大きくなるよう制御する。
(もっと読む)
加減速度制御装置、加減速度制御方法
【課題】アクセル操作子にブレーキ操作子の機能を統合した場合の減速操作性を向上させる。
【解決手段】操作量Saに応じて目標加減速度Gaを設定し、操作量Sbに応じて目標加減速度Gbを設定する。そして、目標加減速度Ga設定手段で設定した目標加減速度Gaと目標加減速度Gb設定手段で設定した目標加減速度Gbとを加算した目標加減速度に応じて、車両の加減速度を制御する(S104、S105)。そして、統合操作制御モードの場合(S101の判定が“No”)、操作量Saが0よりも大きな閾値thであるときには目標加減速度Gaを0とし、操作量Saが閾値thよりも小さいほど目標加減速度Gaの実数を負側に小さくする(S106)。また、操作量Sbが大きいほど目標加減速度Gbの実数を負側に小さくする(S107)。
(もっと読む)
車両制動装置
【課題】より快適なフィーリングを実現し、エネルギー効率の低下と燃費の悪化を招くことを防止することができる車両制動装置を提供すること。
【解決手段】車両制動装置は、選択スイッチにより車両制御手段2cの動作が選択されないで、減速指令がある場合に、減速指令により定まる制動要求減速度が所定減速度以下である場合、ポンプが基礎油圧又は操作油圧を増圧して制御油圧を発生させる増圧制動処理を実行しない制動処理手段5aを備えることを特徴とする。
(もっと読む)
車両制動制御装置
【課題】運転者の体格差によらず同じ制動感が体感される車両制動制御装置を提供する。
【解決手段】車両2を目標の減速度で減速させるよう制動する制動手段3と、車両2の運転者4の頭部位置を検出する頭部位置検出センサ5と、車両2の減速度と運転者4の頭部位置と頭部に生じる減速度との関係があらかじめ設定されており、この関係に頭部位置検出センサ5で検出された頭部位置を適用し、頭部に生じる減速度があらかじめ設定された適正値となるよう、制動手段3に与える目標の減速度を設定する目標減速度設定部6とを備える。
(もっと読む)
ブレーキ制御装置
【課題】回生制動力から摩擦制動力へのすり替えの応答性をより高めることができるブレーキ制御装置を提供する。
【解決手段】ブレーキ回路(管路22P,22S,25FL,25FR)上であってソレノイドアウトバルブ26FL,26FRよりもポンプPの吸入部10aに設けられると共に、ブレーキ回路(管路21P,21S,22P,22S)に接続するリザーバ24P,24Sと、ポンプMP、MSが回転駆動されているときに吐出弁20P,20Sからのブレーキ液の吐出を制限するポンプ吸入遮断バルブ29P,29Sと、を備えた。
(もっと読む)
ブレーキ倍力装置
【課題】 ブレーキ倍力装置とホイルシリンダとの間にブレーキ液圧制御ユニットが介在したとしても、良好なペダルフィーリングを得ることが可能なブレーキ倍力装置を提供すること。
【解決手段】 液圧制御ユニットの作動時と非作動時とで倍力装置の制御を異ならせ、液圧制御ユニットが作動したとしても入力部材の変位が小さくなるように制御することとした。
(もっと読む)
アイドリングストップシステムおよびアイドリングストップの方法
【課題】車両のアイドリングストップからのエンジンの再始動時にヒルスタートアシストを低コストで円滑に行えるアイドリングストップシステムおよびアイドリングストップの方法を提供する。
【解決手段】アイドリングストップシステムは、車両の走行停止状態において原動機4を停止および再始動するアイドリングストップシステムであって、ブレーキペダルの操作によって発生した制動力を少なくとも一時的に保持する制動力保持制御を実行する制動制御装置6と、ブレーキペダルの操作中において、所定の再始動条件が成立した際に停止中の原動機4を再始動する原動機制御装置4Eと、原動機4の再始動に先立って制動制御装置6の作動条件を一時的に緩和する作動条件緩和手段6とを備える。
(もっと読む)
車両用ブレーキ液圧制御装置
【課題】ペダルフィーリングの悪化を抑えつつ、入口弁(常開型比例電磁弁)のハンチングを抑えることを目的とする。
【解決手段】制御部は、常開型比例電磁弁の通電量を第1勾配で減少させる際に、通電量を増加側にオフセットするオフセット制御を実行するオフセット手段を有し、オフセット手段は、電流検出手段で検出された電流値が所定の変動状態となるか否かを判定し(ステップS5)、所定の変動状態となる場合に(Yes)、オフセット制御を実行する(ステップS6)。
(もっと読む)
車両用ブレーキ制御装置
【課題】負圧センサのような圧力センサを用いずとも、ブレーキペダルの踏込量に応じた減速度にて車両を減速させることが可能な車両用ブレーキ制御装置を提供する。
【解決手段】ブレーキペダル13のペダルストロークに応じて、車両に生ずべき速度減少量ΔVaを予測し、実際に車両に生じている速度減少量ΔVとの差Vに基づいて、その差Vが小さくなるように、車両に作用する制動力を制御する。このため、ブレーキ倍力装置20に供給される圧力を検出せずとも、ブレーキペダル13のストロークに対応する、適正な制動力を車両に作用させることができる。
(もっと読む)
電動乗物用のAC駆動システム
【課題】実用的な乗物用の駆動システムを提供する。
【解決手段】この駆動システムは、駆動トルクを提供するための交流(AC)モータを含んでいる。ACモータコントローラは、電源電圧信号、スロットルペダル位置信号、ブレーキペダル位置信号、キースイッチ信号、前進/ニュートラル/後退(FNR)信号、および、実用的な乗物が駆動するように設定されているか、牽引されるように設定されているかを示す走行/牽引信号を受信する。ACモータコントローラは、ACモータのためのAC駆動信号を生成し、AC駆動信号は、電源電圧信号、スロットルペダル位置信号、ブレーキペダル位置信号、キースイッチ信号、FNR信号、および走行/牽引信号に基づいている。
(もっと読む)
ハイブリッド車両の回生制動制御装置
【課題】バッテリ入力限界値の制約にかかわらず回生制動の分担割合を最大にして、回生制動による燃費向上を最大限に享受する。
【解決手段】自動走行中、車速VSPを(a)のごとくt1〜t2間において低下させる減速要求があった時でも、(b)のごとくt1よりも前のt0に回生制動を開始させる。つまり、自車前方情報から設定した停車目標位置、および、自車の走行情報から、車速VSPを運転者が設定した目標車両減速度で規定車速まで低下させるのに必要な要求制動エネルギーを算出し、この要求制動エネルギーを回生制動のみで発生させる場合に必要な回生制動開始位置を演算し、この回生制動開始位置に到達したt0より回生制動を行わせる。よって先読み分だけ要求制動力エネルギーを小さな回生制動力Trで発生させ得て、摩擦制動に頼らず回生制動のみにより要求制動エネルギーを発生させ得て、エネルギー回収率(燃費)を改善することができる。
(もっと読む)
41 - 60 / 546
[ Back to top ]