
Fターム[3D246LA04]の内容
ブレーキシステム(制動力調整) (55,256) | 圧力回路及び要素 (7,929) | マスタシリンダ (783)
Fターム[3D246LA04]の下位に属するFターム
補助圧で制御されるもの (27)
Fターム[3D246LA04]に分類される特許
141 - 160 / 756
電動負圧ポンプの制御装置
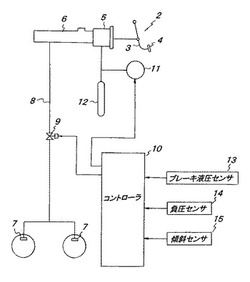
【課題】ヒルホールド中における電動負圧ポンプの駆動頻度を低く抑えて該電動負圧ポンプの作動音や振動の発生を抑制するとともに、電力消費を抑えて電動負圧ポンプの耐久性向上を図ることができる電動負圧ポンプの制御装置を提供すること。
【解決手段】ブレーキブースタ5に負圧を供給する電動負圧ポンプ11と、ブレーキのマスタシリンダ6とホイールシリンダ7とを接続する液圧通路8を遮断してブレーキ力を保持するヒルホールド装置を備えた車両の前記電動負圧ポンプ11のコントローラ(制御装置)10は、前記ヒルホールド装置によって車両がヒルホールドされている間は前記電動負圧ポンプ11の駆動頻度を減少制御するようにする。又、前記ヒルホールド装置によって車両がヒルホールドされている間は前記電動負圧ポンプ11の駆動を開始しないようにする。
(もっと読む)
ブレーキ制御装置およびブレーキ制御方法

【課題】ドライバがブレーキアシスト制御を解除するという意思がないにも拘わらず、ブレーキペダル踏み込み量の変化に伴って目標減速度が得られなくなることを防止する。
【解決手段】ブレーキアシスト制御中に、ドライバがブレーキアシスト制御を解除するという意思がなければ、W/C圧を目標減速度相当圧P1に一定に維持する。具体的には、踏み戻し判定やブレーキオフ状態、もしくは、踏み増し判定などが為されなければ、M/C圧の変動分をキャンセルできるように嵩上げ量Prを設定することで、ブレーキアシスト制御中はW/C圧を目標減速度相当圧P1にする。そして、踏み増し判定にてブレーキペダルの踏み増しが判定されると、嵩上げ量をブレーキオフ時と比べて勾配を大きくして減少させる。
(もっと読む)
ブレーキ装置
【課題】意図しない制動力の発生を抑制できるブレーキ装置を提供すること。
【解決手段】ブレーキペダルの操作により進退移動する入力部材と、入力部材の操作ストロークを検出するストローク検出手段と、ストローク検出手段の検出結果に基づいてアクチュエータ(電動モータ)を制御するコントローラと、を備え、コントローラは、制御可能な状態になったときに、記憶された初期原点Ssをストローク検出手段(ストロークセンサ)の制御原点S*として設定して、ストローク検出手段の検出値Sに基づいてアクチュエータを制御し、入力部材が制御原点S*を越えて後退するごとに、そのときの入力部材の位置をストローク検出手段の制御原点S*として更新する。
(もっと読む)
車両制御装置および車両制御方法
【課題】ブレーキペダルの踏み込み操作量を検出するためのセンサを設けることなく、アクセルペダルおよびブレーキペダルの同時踏み込みに起因する車両の加速や発進を抑える。
【解決手段】ピッチング現象による車両10の姿勢変化分に応じたピッチング補正値を算出する。このピッチング補正値と、機関ECU31により算出される内燃機関11の出力トルクと、加速度センサ34により検出した車両10の加速度とに基づいてブレーキペダル17の踏み込み操作力を推定する。その推定されるブレーキペダル17の踏み込み操作力が第2判定値以上であり、且つアクセルセンサ33により検出されるアクセルペダル22の踏み込み操作量が第1判定値以上であるときに、内燃機関11の出力トルクを制限する。
(もっと読む)
アンチロックブレーキ制御装置
【課題】ABS制御を実行する車輪の回転速度のみに基づいて、実際の路面状態に沿ったABS制御を実行することができるアンチロックブレーキ制御装置を提供する。
【解決手段】アンチロックブレーキ制御手段65は、検知された回転速度Vに基づいて算出された前輪減速度Gが第1スリップ検出閾値G1を超えることで前輪WFのロック状態を判定すると共に、乗員の操作により生じているブレーキ圧を開放制御してロック状態を解消する。ブレーキ圧の開放制御に伴って前輪WFの回転が復帰する際に発生する復帰加速度Gfに基づいて、少なくとも路面摩擦の大きさに起因すると共に自動二輪車1の停止しやすさの指標となる推定減速度Gsを導出する路面摩擦推定手段66を具備する。アンチロックブレーキ制御手段65は、推定減速度Gsに応じて目標前輪回転車速Vmを算出し、ABS制御中は回転速度Vが目標前輪回転速度Vmに収束するようにブレーキ圧を制御する。
(もっと読む)
自動車
【課題】インバータの複数のスイッチング素子の一部を含む閉回路が形成される閉回路異常が生じている状態でイグニッションオフされた後に、その閉回路異常に起因する不都合が生じるのを抑止する。
【解決手段】閉回路異常が生じている状態でイグニッションスイッチ60がオフされたときには、駆動輪39a,39bおよび従動輪39c,39dに制動力が付与されるようブレーキアクチュエータ42を制御する。これにより、閉回路異常が生じている状態でイグニッションスイッチ60がオフされた後に、閉回路に電流が流れるのを抑止することができ、閉回路異常に起因する不都合が生じるのを抑止することができる。
(もっと読む)
ブレーキ制御装置
【課題】 異音の発生をより効果的に抑制できるブレーキ制御装置を提供すること。
【解決手段】 エンジンEの自動停止中にホイルシリンダ圧Pwcを保持する車両のブレーキ制御装置において、保持していたホイルシリンダ圧Pwcをエンジン再始動時に低下させる際、エンジンEのクランキング中は、クランキング後よりも大きな勾配ΔP1でホイルシリンダ圧Pwcを低下させる。
(もっと読む)
リニアソレノイドバルブの制御装置
【課題】リニアソレノイドバルブの制御装置における高応答性を実現するための初期駆動電流を正確に学習する制御を行う。
【解決手段】目標圧Paとブレーキ圧Paとの偏差δPに応じて油圧フィードバック制御器12により求めた油圧フィードバックデューティ比Dyfと、初期デューティ学習器16により、増圧用バルブ5の上下流の差圧ΔPに基づいて求めたバルブ初期特性による初期駆動量Dy0及び修正量ΔDyとにより、リニアソレノイドバルブからなる増圧用バルブ5を制御する駆動デューティ比Dyを決定する。リニアソレノイドバルブの安定動作時に初期駆動量を求め、その初期駆動量をフィードフォワード制御の指令値としてリニアソレノイドバルブを制御することができ、リニアソレノイドバルブが動き始めるための初期駆動量を確保した通電制御を行うことができる。
(もっと読む)
ソレノイド駆動装置
【課題】駆動時に発生する熱を抑制することができるソレノイド駆動装置を提供する。
【解決手段】ソレノイド駆動装置100において、第1駆動ドライバ12は、第1ソレノイド40に駆動電流を供給する。第2駆動ドライバ22は、第1駆動ドライバ12とは別の系統から第1ソレノイド40に駆動電流を供給する。第1制御部30は、第1駆動ドライバ12および第2駆動ドライバ22を制御する。第1制御部30は、第1ソレノイド40を駆動する際、第1駆動ドライバ12および第2駆動ドライバ22を切り替えてどちらか一方の駆動ドライバから駆動電流を供給させる。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及びトラクション制御が同時に実行される場合に、車輪速度を検出する装置の異常に起因して基準車輪速度が不適切な値になりトラクション制御が不適切に実行されることを防止する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う車両の走行制御装置。旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ旋回補助制御が実行されているときには、旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度Vmedloに基づいて車輪の駆動スリップを判定するための基準車輪速度Vwbを設定する。
(もっと読む)
車両の制駆動力制御装置
【課題】 従動輪の制動力および駆動輪の制駆動力を制御し、車両を適切に走行させるとともに車両の挙動を制御する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、センサ31,32,33から入力した各検出値に基づいて車両Veの挙動を制御するために各輪11〜14が発生すべき前後力Ffl,Ffr,Frl,Frrを演算する。ユニット30は、従動輪11,12側の前後力Ffl、Ffrの大きさを比較し、大きい方の前後力が駆動力であるか否かを判定する。そして、ユニット30は、大きい方の前後力が駆動力であるときにこの前後力を用いてオフセット前後力FOSを演算し、従動輪11,12の前後力Ffl、Ffrから前後力FOSを減算するとともに駆動輪13,14の前後力Frl,Frrに前後力FOSを加算して、左右前輪11,12および左右後輪13,14の目標前後力Fdfl,Fdfr,Fdrl,Fdrrを演算する。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】既存のポンプを用いた安価な回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを起動させることで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、電磁比例リリーフ弁62のリリーフ圧を無負荷状態から設定圧までの範囲内でアーティキュレート角に応じた圧に制御することで、プライオリティバルブ59をシフトさせて、ポンプ57からバケット作業機回路60aへの流量より小旋回圧供給回路60への流量を優先させるとともに、電磁比例リリーフ弁62に基づいて小旋回圧供給回路60の圧力を制御し、左旋回の場合は左小旋回制御弁63のみを弁開状態に制御する。
(もっと読む)
車両用ブレーキ装置および車両用ブレーキ装置のエア抜き方法
【課題】 ストロークシミュレータを備えたブレーキ装置において、ブレーキ液を圧送する特別の圧送装置を必要とせずにストロークシミュレータのエア抜きを行えるようにする。
【解決手段】 ストロークシミュレータ35が、マスタシリンダ11から供給側液路Ra,Rbを介して伝達されるブレーキ液圧で駆動されるピストン38と、ピストン38の背部に形成された背室70と、背室70をリザーバ20に接続する排出側液路Rc,Rdと、ピストン38および背室70をバイパスして供給側液路Ra,Rbおよび排出側液路Rc,Rdを接続するバイパス液路Re,Rfと、バイパス液路Re,Rfを遮断する開閉弁71とを備えるので、開閉弁71を開いた状態でブレーキペダル12を操作することで、ブレーキ液をマスタシリンダ11からリザーバ20に循環させ、ブレーキ液の圧送装置を必要とせずにストロークシミュレータ35に溜まったエアをリザーバ20に排出することができる。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】既存のポンプを利用した安価な回路を用いて、フルアーティキュレート状態でなくても小旋回ブレーキモードを発揮させることで多くのハンドル旋回操作を不要としたアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】小旋回スイッチがオンの状態で後車体に対し前車体を屈折させるハンドル旋回操作があると、コントローラは、電磁弁56A,56Bを閉じて左ブレーキ回路41と右ブレーキ回路42間を遮断するとともに、方向切換弁59を切換えて、ポンプ57を他の回路60aから小旋回圧供給回路60に切換える。旋回内側に対応する左小旋回用比例減圧弁63または右小旋回用比例減圧弁64の一方を弁開状態に制御するとともに、電磁弁66を弁開状態に制御して、アキュームレータ62内に蓄えられた作動油を、左ブレーキ回路41または右ブレーキ回路42の一方に供給する。
(もっと読む)
車両用制動力制御装置
【課題】ドライバーが通常走行で多用する低い制動目標値のとき、同じペダル踏力によるブレーキ操作に対し制動目標値が異なるということを低減し、ドライバーに与えるブレーキ操作違和感を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、マスターシリンダ3と、ペダル踏力算出部60と、ペダルストロークセンサ18と、第1目標制動力算出部65と、第2目標制動力算出部66と、寄与度設定部63と、目標制動力算出部67と、を備える。寄与度設定部63は、目標制動力が低いと推定されるときほどペダル踏力に基づく第1目標制動力の寄与度合い(1−β)を、ペダルストロークに基づく第2目標制動力の寄与度合いβより大きく設定する。目標制動力算出部67は、寄与度合い(1−β),βに応じて第1目標制動力分と第2目標制動力分を算出し、第1目標制動力分と第2目標制動力分の加算により最終の目標制動力を得る。
(もっと読む)
車両用制動制御装置
【課題】本発明は、精度良くブレーキペダルストロークセンサのゼロ値を示す基準値の補正を行うことのできる車両用制動制御装置を提供する。
【解決手段】初期学習許可判定にて初期学習開始条件が成立し、更にイグニッションスイッチがON後(i)に初期学習開始条件が成立すると初期学習を開始する(ii)。初期学習を継続し、ブレーキペダルストロークセンサの基準値がブレーキペダルのゼロ点の初期学習終了範囲内となるまで初期学習を行う(iii)。また、ブレーキペダルストロークセンサの基準値が初期学習終了範囲内で初期学習時間維持されると初期学習を終了する(iv)。正規学習開始条件が成立し、正規学習開始条件が成立すると正規学習を行う(v)。
(もっと読む)
エンジン制御装置
【課題】ブースタ負圧によるブレーキ補助力確保の確実性向上、及びアイドルストップ期間の拡大による燃費向上の両立を図ったエンジンの制御装置を提供する。
【解決手段】エンジンの吸気負圧をブースタ負圧として導入し、運転者によるブレーキペダル踏力をブースタ負圧で補助するブースタ装置と、車速がゼロになるのを待たずしてエンジンの自動停止を許可させるアイドルストップシステムと、を備えた車両に適用され、エンジンの自動停止時において、ブースタ負圧が所定の閾値TH1未満になった場合に、エンジンを自動再始動させてブレーキ補助力を回復させるブレーキ用再始動手段と、エンジンの運転時のブースタ負圧の低下量Δpave(ブレーキ補助力が低下していく履歴)に基づき、エンジンの自動停止禁止の是非を判定するアイドルストップ禁止判定手段S23と、を備える。
(もっと読む)
回生制動制御装置
【課題】本発明は、ブレーキフィーリングを向上することのできる回生制動制御装置を提供する。
【解決手段】ペダル回生最大トルク演算ブロック(B18a)では、入力された車速におけるブレーキペダル操作で発生しうる最大の回生トルクであるペダル回生最大トルクが演算される。また、ゲイン演算ブロック(B18b)では、ブレーキペダルストローク量が所定操作量以下の少ない領域においてはブレーキペダルストローク量の変化量に対するゲインの変化量を少なくし、ブレーキペダルストローク量が所定操作量より多い領域においてはブレーキストローク量の変化量に対するゲインの変化量を多くしている。そして、ペダル回生最大トルクとゲインとを乗算し、ペダル回生トルクが演算され、切換ブロックに供給される。
(もっと読む)
ブレーキ制御装置
【課題】ブレーキ制御装置において、ABS制御実行中、ブレーキペダルの操作フィーリングを改善しつつ、ホイールシリンダの急増圧要求に対して迅速に増圧可能にする。
【解決手段】ブレーキペダル19の操作量に応じてマスタ圧制御ユニット4により電動モータ22の作動を制御してプライマリピストン8を駆動し、マスタシリンダ2でブレーキ液圧を発生させてホイールシリンダBa〜Bdに供給する。ホイール圧制御ユニット6がABS制御実行中において、プライマリピストン8の移動を制限することにより、ブレーキペダルの操作フィーリングを改善し、ホイールシリンダBa〜Bdの急増圧が必要な場合には、プライマリピストンの移動の制限を解除し、プライマリピストン8を前進させて、ホイールシリンダBa〜Bdを急増圧可能にする。
(もっと読む)
車両用情報処理装置および車両制御装置
【課題】車輪の滑りによる車両の挙動を精度よく判定することができる車両用情報処理装置および車両制御装置を提供すること。
【解決手段】車両100のヨーレートを検出するヨーレート検出部38によって検出されたヨーレートの向きに基づいて、車両の車輪の滑りによる車両の挙動を判定する車両用情報処理装置1、および車両用情報処理装置を備える車両制御装置1−1。車両用情報処理装置は、例えば、ヨーレートの向きが所定時間変化しない場合に上記挙動が生じていると判定する。
(もっと読む)
141 - 160 / 756
[ Back to top ]