
Fターム[3E003CB02]の内容
容器詰包装操作 (2,738) | 制御手段及び制御対象 (190) | 電気的制御手段 (51) | 演算機構を含む制御手段 (32)
Fターム[3E003CB02]に分類される特許
1 - 20 / 32
物品搬送方法及び物品搬送装置
【課題】物品や容器のサイズ或いは容器内への物品の詰め合わせ状態などに応じた複数の物品の供給形態に対応可能な物品搬送方法及び物品搬送装置を提供する。
【解決手段】所定間隔毎に搬送される物品搬送コンベヤ2上の複数の物品1を吸着手段で吸着し、所定間隔毎に搬送される容器搬送コンベヤ4の第一コンベヤ5上の容器3に各物品1を載置して該容器3と共に搬送する際に、指定手段により第一の制御プログラムに切り替えられた状態では複数の物品1の夫々に対応した位置に配備された吸着具が各物品1を夫々吸着してまとめて容器3の一つに載置し、また、指定手段により第二の制御プログラムに切り替えられた状態では物品1を夫々吸着している吸着具の間隔を容器搬送コンベヤ4の第一コンベヤ5上の複数の容器3の間隔に合わせて該複数の容器3に夫々の物品を載置する。
(もっと読む)
箱詰め装置

【課題】構造を簡素化して製造コストを低減できる箱詰め装置を提供する。
【解決手段】箱詰め装置10は、複数の物品Tを列状に並べて整列させる物品整列装置14と、整列させられた複数の物品Tを列の側方に同時に押し出す物品押出し装置16と、物品押出し装置16で押し出されてきた複数の物品Tの上端部を把持する複数のチャック90を有し、複数の物品Tを外装箱Uの内部に押し込む物品押込み装置18と、物品押出し装置16で押し出されてきた複数の物品Tの上端部を複数のチャック90に押出し方向から案内する複数のアッパーガイド110とを備える。
(もっと読む)
果実保持装置
【課題】イチゴを吸着保持する際のイチゴの損傷を抑制する。
【解決手段】制御部が、吸着前画像取得部により取得されたイチゴの画像から、イチゴの向きと吸着位置とを検出し(ステップS10,S12)、移動部を介して、一端部にイチゴと接触する接触部を有する筒状の吸着管を移動して、接触部をイチゴの吸着位置に接近させ、接触部がイチゴの吸着位置に接触する前に、吸着管の内部を負圧にする負圧発生機構の動作を開始する(ステップS18)。これにより、イチゴの方が、イチゴが載置されている面(載置面)から離れて吸着管に吸い寄せられるようになる。
(もっと読む)
箱詰め装置
【課題】所定の異常が生じた場合に、ライン全体の処理能力が低下することを防ぐこと。
【解決手段】搬送路の一方の端部にある整列物品群の欠品及び物品の姿勢異常を検知する整列物品群異常検知器45と、箱待機位置に箱が待機しているか否かを検知する箱待機検知器24と、箱詰機構及び物品整列搬送装置6を制御する制御器31と、を備え、制御器31は、整列物品群異常検知器45で整列物品群の欠品及び姿勢異常の少なくともいずれかを検知した場合、又は箱待機検知器24で箱待機位置に箱が待機していないことを検知した後所定の条件が満たされない場合に、搬送路を搬送される整列物品群を搬送路の側方の物品押込位置へ押し出さないようにして、搬送路の一方の端部にある整列物品群を搬送路の他方の端部まで搬送するよう、箱詰機構及び物品整列搬送装置6を制御する。
(もっと読む)
整合装置及び封入封緘装置
【課題】用紙の幅寸法に対して封筒の幅寸法に余裕があるときに整合動作を省略して生産性を向上させる。
【解決手段】搬入した用紙の両側端を整合する整合部4を備えた整合装置1において、用紙を封入する封筒の封筒サイズ情報から得られる幅寸法から整合対象となる用紙の用紙サイズ情報から得られる幅寸法を差し引いた差分値と、予め設定された整合動作実行判別用閾値とを比較し、前記閾値を超えたときに整合動作を行わないように制御する制御部7を備えた。
(もっと読む)
箱詰め装置
【課題】押し込まれる物品が外装箱の開口の上縁に接触することを防止すること。
【解決手段】床板50を開放することにより形成された開口部から、下方に配置された外装箱に1以上の物品(整列物品)を押し込むよう押込部材を下降させる押込装置14と、押し込まれる物品を外装箱に案内する案内装置10とを備え、案内装置は、上面及び下面が開放された中空の逆N角錐台状(Nは3以上の整数)の仮想の枠体のN個の角部をそれぞれ構成するような形状のN個の案内片45を有し、該案内片を、前記基準位置において前記仮想の枠体を形成して前記押し込まれる整列物品を外装箱に案内するように、それぞれの稜線を含む実質的な鉛直面内で下方にそれぞれ揺動させるよう構成されており、外装箱は、所定のN角柱状であり、上面が開口し、且つ該上面のN個の辺に有するフラップが立っている状態で床板を開放することにより形成される開口部の下方に配置される。
(もっと読む)
物品移載装置および物品移載方法
【課題】箱体への物品の投入時に、物品が箱体の外にこぼれ落ちることを防止できる物品移載装置および物品移載方法を提供する。
【解決手段】箱体17の収納容積の種別を箱センサ36,37により判別し、箱体17に既に収納されている物品16の体積を、箱体17の上方に位置した距離センサ35により検出されるデータにより求め、箱体17内の物品16の容積が箱体17の収納容積の一定の比率以上のとき、ベルト送り装置28によるベルト体27の送り出しが終了する前にチェーン駆動モータ24を駆動してチェーン23a,23bの移動を開始し、それに伴うベルト体27の一方の端辺部27aの周回を開始する。これにより、ベルト体27が箱体17内の一定の比率以上の物品16の上に載ることに起因して、ベルト体27に支持された物品16が箱体17の外部に放り出されることが回避される。
(もっと読む)
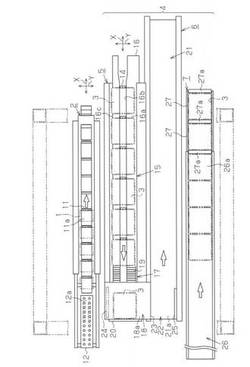
物品箱詰設備及び物品箱詰方法
【課題】本発明は、容器支持手段に支持された容器を他の容器へ入れ替える時であっても、横搬送コンベヤと横搬送コンベヤよりも下流側のコンベヤとの接続部に青果物が溜まることがなく、しかも、物品を均一に搬送することができる物品箱詰設備及び物品箱詰方法を提供することを目的とする。
【解決手段】物品箱詰設備10において、主投下コンベヤ24(a)及び副投下コンベヤ24(b)が容器14へ青果物16を投下する時に、制御手段30は、横搬送コンベヤ20に第一の横搬送速度V1で青果物16を搬送させ、入替手段13が容器支持手段12(a)及び(b)に支持された容器14を他の容器14へ入れ替える時に、制御手段30は、主投下コンベヤ24(a)及び副投下コンベヤ24(b)に青果物16の投下を停止させ、横搬送コンベヤ20に第一の横搬送速度V1よりも低速の第二の横搬送速度V12で青果物16を搬送させるように構成した。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができ、箱に投下した物品の姿勢が乱れるのを防止することができる箱詰め装置を提供すること。
【解決手段】 第3及び第4の羽根車21、22の下方の所定位置に一時保持装置40を設け、一時保持装置40は、受け取り角度位置において投下装置20から投下された複数の物品を受け取って、減速しながら停止角度位置に停止し、その後、複数の物品を箱に落下させる。
(もっと読む)
画像形成システム、及び封筒への封入方法
【課題】封筒への封入物の封入が不可と判断された場合、折り処理される封入物の増し折り回数を増加させて封入可能とし、生産性の向上と資源の無駄を省く。
【解決手段】折り無しを含めて封入物の折り種類を選択し、折り種類に応じて予め設定された用紙1枚当たりの換算枚数を記憶し、また、封筒に封入可能な用紙の上限枚数を記憶し、記憶された換算枚数の情報と選択された折り種類の情報とに基づいて総換算枚数を算出し(S101,S102)、記憶された上限枚数と算出された増し折り無し時の総換算枚数とを比較して封入物の前記封筒への封入可否を判断し(S103)、封入可と判断された場合は増し折り無しで(S104)、封入不可と判断された場合は折り用紙に対して増し折り回数を変更させて増し折りを実行させ、封入物の封筒への封入動作を行わせる(S104,S106,S107,S108,S105)。
(もっと読む)
ケース収納袋、ケース収納装置およびケース収納方法
【課題】写真等を宅配便等で配送するケースは小さい場合に写真の量が多くなるとそのケースを複数個に分けて送付すると配送料が高くなることがあった。
【解決手段】第1の検出部を表面に検出可能に備えた、フランジ部と胴部と内容物を収容する凹部を備えた第1のケースと、第1の検出部と同一または所定の関係にある検出部を備えた略同一形状の第2のケースとを、第1のケースと第2のケースを第1の検出部と第2の検出部が表裏関係にあるようにして収納し、閉鎖する蓋部を備えたケース収納袋、収納装置および収納方法。
(もっと読む)
箱詰めシステム、及び箱詰め方法
【課題】 箱の中に入れた板状物が転倒することなく箱詰めできる箱詰めシステムを提供する。
【解決手段】 箱詰めシステム1は、複数のガラスフレーム2が立てた状態で並ぶように下箱3aの中に順に挿入して箱詰めする箱詰め用ロボット12と、箱詰め用ロボット12が挿入するガラスフレーム2を立った状態のまま下箱3a内に案内し、支えるガイド部材53と、前記ガイド部材53を所定方向に移動させるボールねじ機構44と、前記ボールねじ機構44を制御してガイド部53を移動させる箱詰め用制御装置26とを備える。箱詰め用制御装置26は、挿入するガラスフレーム2が最後尾のガラスフレーム2と接すると、最後尾のガラスフレーム2の後方にガラスフレーム2を挿入可能にするために前記ガイド部材53をガラスフレーム2の厚み分だけ後方に下げるように構成されている。
(もっと読む)
チューブの箱詰め装置、箱詰め方法及びチューブの箱詰め装置用作業ハンド
【課題】ロボット等でチューブの箱詰め動作を自動化するにあたり、不用意なチューブの抜き出しを確実に発見できる技術を提供する。
【解決手段】箱詰め装置は、ロボットにより作業ハンド16を移動させてチューブTを箱詰めする。チューブTは予め物品列TAの状態で整列されており、作業ハンド16は各フィンガ18にチューブTを引っ掛けた状態で物品列TAを保持し、収容箱14内に箱詰めする。両側のフィンガ18にはそれぞれ内部にフォトセンサ24が収容されており、その間のフィンガ18には径方向に貫通孔が形成されている。フォトセンサ24の検出光Lは貫通孔を通って一方から投光され、他方で受光される。箱詰め後に作業ハンド16を退出させてフォトセンサ24による検出を行い、チューブTが残存しているか否かを自動的に検出する。
(もっと読む)
箱詰装置
【課題】箱内に容易に商品を収納することができる箱詰装置を提供することである。
【解決手段】本発明に係る箱詰装置100においては、複数の包装物800が板部材駆動装置200,包装物移動装置300および姿勢制御装置400により支持され、当該複数の包装物800を箱500に挿入する場合に、箱500の外側より箱500の辺501,〜,504を変形するよう開口部変形装置560により力が付与される。それにより箱500の枠体である辺501,〜,504が曲線状になり、包装物800を確実に収納することができる。
(もっと読む)
間欠式物品挿入装置
【課題】プッシャ機構のワークエリアを小さくし、カートニングマシンの設計の自由度を高め、挿入効率も高める間欠式物品挿入装置を提供すること。
【解決手段】 物品挿入装置100は、コンベア201と202を用いてカートンCと物品Bとを同速で並進させ、その進行方向に直角な方向から物品BをカートンC内に挿入する装置であって、物品Bの上空に配した複数の掻込アーム121と、物品Bの載置間隔毎に前記複数の掻込アーム121を前記進行方向に直角な向きで一列に軸通する前記進行方向に配したアーム支持軸103と、アーム支持軸103を進行方向に移動させる並走用モータ105と、アーム支持軸103を進行方向に直角な方向に移動させる挿入用モータ106と、アーム支持軸103を軸回動して総ての掻込アーム121を一斉に上方に起き上がらせる軸動アクチュエータ107と、を具備する。
(もっと読む)
移載装置およびケーサーシステム
【課題】ワークにストレスをかけることなく、かつ小型で高速にワークをケースに移載できる移載装置およびケーサーシステムを提供すること。
【解決手段】所定の梱包位置である第二位置P302を通過するように連続供給されるケースCにワークWを移載する移載装置であって、ワークWが供給されるマガジン部40と、マガジン部40に供給されたワークWを把持可能な把持体と、前記把持体に把持されたワークWをマガジン部40から空中へと離間させた後に、ワークWを把持した前記把持体を第二位置P302を通過中のケースCへ移送する移送機構30と、を備え、移送機構30は、前記把持体をケースCの移動に追従させてワークWをケースCに案内する追従手段20を有する。
(もっと読む)
物品投入装置および物品投入方法
【解決課題】板状をなす物品を整然と、しかも素早く包装袋に投入することのできる物品投入装置および物品投入方法を提供する。
【解決手段】物品投入装置1は、多数の物品3を、前方から後方に向けて順次ずれ重なった列状に集積する集積手段と、集積された物品3を一群にして、所定の速度で前方に投射する投入コンベヤ21と、包装袋4を、投射された物品3の軌道50に臨む開口状態にて把持する把持手段22と、を備えて構成されている。
(もっと読む)
包装機
【課題】被包装物を包装シートで包み込む包装機において、包装機の駆動に必要なエネルギー効率の向上と、作業環境の悪化防止を図る。
【解決手段】包装シート10の取出し、成形、前記包装シート10への被包装物13の挿入、及び前記包装シートの封緘並びに圧着を行う各工程のアクチュエータは電気モータで駆動される構成であり、前記各アクチュエータの出力部の、移動速度、移動距離、又は、前記被包装物側への押圧力は、前記電気モータの出力を数値データで設定することで調節できること。
(もっと読む)
箱詰装置
【課題】簡易な構成で確実に包装物を一律に重ね合わせ、箱詰を行うことができる箱詰装置を提供することである。
【解決手段】箱詰装置100においては、第1搬送部200と、第1搬送部200の下方に設けられた第2搬送部400,410とを備える。第1搬送部200の下流端部には、下方に傾斜する傾斜部210が設けられる。柔軟な薄状体によって包装された包装物110が第1搬送部200から第2搬送部400へ落下され、集積部AR1において重ね合わせられる。包装物110は、第2搬送部400,410により第1搬送部200の搬送方向と逆方向の矢印M2の方向に搬送される。
(もっと読む)
箱詰め装置
【課題】箱詰めする物品を安定して移送することができるとともに、物品の処理能力を向上させることができる箱詰め装置を提供する。
【解決手段】無端搬送路12上に物品を収容可能な間隔で設けられた一群のフィン13を備え、各フィン13が無端搬送路12の円弧状反転部12cの物品受取位置にきたときに物品を受け取るように構成された整列コンベア2と、整列コンベア2を駆動させる第1サーボモータと、第1サーボモータの駆動を制御するコントローラとを備えており、コントローラが、最後尾のフィン13が物品受取位置で物品を受け取ったあと上記第1サーボモータを第1設定速度を超えないように加速させ、最後尾のフィン13が往路部12b近傍に至ったとき第1サーボモータを第1設定速度を超えないように加速させるときより大きい加速度で加速させるように構成されてなる。
(もっと読む)
1 - 20 / 32
[ Back to top ]