
Fターム[3E054JA02]の内容
包装位置への供給−物品の供給 (7,769) | 包装方法 (453) | 箱詰め (195)
Fターム[3E054JA02]に分類される特許
121 - 140 / 195
移送路に沿うパッケージのグループ分けユニットおよび方法
移送路(T)に沿ってパッケージ(2)をグループ分けするためのユニット(1)が記載されており、このユニットは、移送路(T)に平行な長手方向の複数の列として配置されたパッケージ(2)のグループ(3)を受取る入口ステーション(5)と、移送路(T)を横切る方向の少なくとも1列の列としてパッケージ(2)を整列させるために、各々のグループ(3)のパッケージ(2)と相互作用する整列手段(45,46;62)を有している。このユニット(1)は回転装置(60)を有しており、この回転装置は、整列手段(45,46;62)が各々のグループ(3)のパッケージ(2)に相互作用した後、各々のグループ(3)のパッケージ(2)を所定の角度だけ移送路(T)を横切る方向(A)の回りに回転させるために、選択的に作動される。 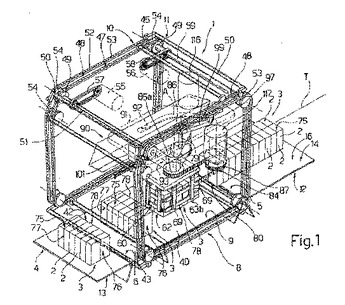 (もっと読む)
(もっと読む)
把持装置、並びに把持装置を備える整列装置、収容装置および把持方法

【課題】把持対象の上方の位置に配置しても、その端部を表裏の側から挟持可能な把持装置を提供する。
【解決手段】このハンド(把持装置)30は、一対をなす第一の把持面31aおよび第二の把持面32aでシート部材(把持対象)2を挟持するものである。そして、その第二の把持面32aは、シート部材2の外縁部2tよりも外側の位置から内側の位置にかけて旋回されるようになっており、さらに、自身の旋回円S2に対し、前記内側の位置では、その径方向にシート部材2を挟持するように第一の把持面31aに対向するとともに、前記外側の位置では、径方向で第一の把持面31aに重なりあわない待避位置に位置するようになっている。
(もっと読む)
集積装置

【課題】 コンパクトで高速処理が可能であり、高密度に安定して包装物を集積できる集積装置を提供する。
【解決手段】 搬送機構3による包装物1の搬送方向に沿った複数箇所に定ピッチPでプッシャー4a〜4jを配置する。このプッシャー4a〜4jは、エアシリンダ51で搬送面34に対して突出・退入可能とし、かつ水平駆動機構52で搬送方向に同期移動可能に構成する。搬送面上に平置きされた包装物1をプッシャー4a〜4jで押し上げて傾斜姿勢に変換した後、プッシャーを搬送方向に同期移動させて前記ピッチPを縮小し、包装物1を集積する。
(もっと読む)
箱詰め装置及びそれを用いた箱詰め方法
【課題】複数の外装箱に同時に物品を箱詰め可能であって、かつ、吸着装置と外装箱配置装置とをより簡素に構成することができる箱詰め装置とそれを用いた箱詰め方法を提供する。
【解決手段】2以上の所定数の物品Wを並列させた物品群の状態として配置位置Pに配置する物品配置装置3と、配置位置Pの下方の箱詰め位置Uに所定数の外装箱Cを物品Wの並列方向に並行するようにして配置する外装箱配置装置80と、配置位置Pの上方において並列方向に並行して並ぶ所定数の吸着具14Fを有し、吸着具14Fは相互に並列方向に離隔可能であって、かつ全ての吸着具14Fが配置位置Pを通って昇降可能に構成されている吸着装置14と、配置位置Pの床を開放する開閉装置13と、を有する。
(もっと読む)
移送路に沿うパッケージのグループ分けユニット
移送路(T)に沿ってパッケージ(2)をグループ分けするユニット(1)であって、パッケージ2を受取るために移送路(T)に平行な複数の長手方向ラインとして配列された受取りステーション(5)と、それぞれの長手方向ラインからの、移送路(T)を横断する少なくとも1列に整列された所定個数のパッケージ(2)で成るグループ(3)の取出しステーション(6)と、各グループ(3)の個数に等しい個数のパッケージ(2)を所定の時間間隔で供給され、パッケージ(2)を移送路(T)に沿って送る移動コンベヤ面(9)と、移送路(T)に平行な作用部分(R1)を有する第1の移動路(R)に沿って周回移動する少なくとも1つの整列部材(45)と、受移送路(T)に平行な作用部分(S1)を有する第2の移動路(S)に沿って周回移動する少なくとも1つの押し部材(50)とを含み、整列部材(45)および押し部材(50)が独立した第1および第2のコンベヤ手段(48,53)によりそれぞれ移動され、第1および第2の移動路(R,S)の作用部分(R1,S1)が互いに一致しているユニット(1)が記載される。 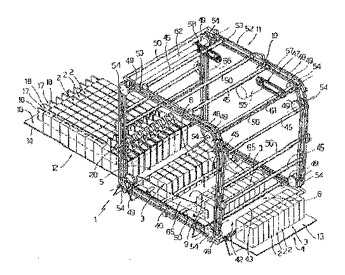 (もっと読む)
(もっと読む)
箱詰め装置
【課題】重量の比較的重い物品や比較的多数の物品を綺麗に整列させて確実に箱詰めする。
【解決手段】予め定めた数の整列させる物品をその整列の長さ方向の両側から保持部9により挟み込んで保持し、保持部9により挟み込まれている物品を押し込み部15により上から押さえて外装箱2に詰める。保持部により略水平方向に整列して保持された物品のうち略中央の物品を上方に向かって吸引するサクションボックスを設け、保持部による挟み込む力とサクションボックスによる吸引力によって物品を保持する。
(もっと読む)
農産物の箱詰装置
【課題】低コスト化を図りながら迅速な箱詰め作業を可能とする箱詰装置を提供することを目的とする。
【解決手段】吸着子がm行n列のマトリックス状に配置された第1の吸着部と、該第1の吸着部に並設された第2の吸着部とからなる吸着ユニット(8,9)と、該吸着ユニットを箱詰待機位置と箱詰位置との間で移動させる移動手段(74など)と、前記吸着ユニットに設けられ、外力を受けて、少なくとも前記第1の吸着部の吸着子の列間隔を変更する第1の間隔変更機構(77,78)と、前記吸着ユニットに設けられ、外力を受けて、前記第1及び第2の吸着部間の間隔を変更する第2の間隔変更機構(77、88、79など)と、前記第1及び第2の間隔変更機構に対してそれぞれ、前記外力を付与する第1及び第2の外力付与手段(76、86)とを有する農産物の箱詰装置。
(もっと読む)
耳折り装置付ロボットハンド及びそれを用いた箱詰め装置
【課題】 簡単な構成でもって包装体の耳部を折り曲げた状態の包装体を包装箱などに自動供給することのできる箱詰め装置を提供すること
【解決手段】 ロボットアーム2の先端下面に、ロボットハンド10を取り付ける。ロボットハンドは、包装体を吸着する筒状本体11と、包装体の耳部4を折り曲げる耳折り部12とを備える。筒状本体は、円筒状の上部筒体13と、その上部筒体の下方に移動可能に装着された下部筒体14とを備え、下部筒体の下面が貫通孔16を有する吸着部15となる。吸着部が包装体の上面に接触した状態で吸引駆動すると、包装体が吸着部に吸着され、さらに下部筒体ひいては包装体が上昇移動し、耳折り用爪25により耳部4が下方に向けられ、更に耳折り用爪25が閉じることで耳部が確実に折り曲げられる。ロボットハンドを所定位置に移動し、吸引を解除することで包装体を箱に供給できる。
(もっと読む)
整列コンベア用供給装置及びその運転方法、並びに箱詰め装置。
【課題】無端軌道に載っている物品の回転角度を正確に判断することができ、かつ正確な回転角度の判断を比較的低コストで実現できる整列コンベア用供給装置の運転方法、及びその運転方法を利用した整列コンベア用供給装置及び箱詰め装置を提供する。
【解決手段】本発明の整列コンベア用供給装置の運転方法は、無端軌道204と、無端軌道204の上方に配設された二次元コード読み取り装置202と、二次元コード読み取り装置202と通信可能に構成された制御装置30と、を有し、二次元コード読み取り装置202が無端軌道204によって搬送される物品Wの上面に表示されている二次元コードQの読み取り角度を取得する角度取得ステップと、制御装置30が読み取り角度を二次元コード読み取り装置202から取得して読み取り角度に基づいて物品Wの回転角度を算出する回転角度算出ステップと、を有する。
(もっと読む)
箱詰装置
【課題】 本発明は、個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に詰める箱詰装置において、袋の厚みの偏りによる不都合に対応することを目的とする。
【解決手段】 個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に繰り返し詰める箱詰装置であって、前記各個別の袋の厚みを検出する厚み検出手段と、前記一群の袋について、前記厚み検出手段より検出される前記各個別の袋の厚みを加算し、または前記厚み検出手段より検出される前記各個別の袋の厚みを所定値から減算する演算手段と、を備えることを特徴とする。
(もっと読む)
集積装置およびこれを備えた箱詰め装置
【課題】1台の装置内において、複数の集積パターンによって物品の集積を効率よく行うことが可能な集積装置およびこれを備えた箱詰め装置を提供する。
【解決手段】箱詰め装置1では、搬送装置10から搬送されてくる商品X1,X2を、互いに並列に配置された2つの集積処理部(搬送機構30および吸着搬送機構40)において、異なる集積パターンによって集積処理を行う。そして、搬送機構30と吸着搬送機構40とにおいてそれぞれ集積処理された商品X1,X2を、共通の排出位置である排出装置50の2Fの階層部分から下流側に配置されたフラップ開口装置60の方へ排出する。
(もっと読む)
集積装置
【課題】物品のサイズに応じて搬送手段の長さが変化することにより、物品のサイズの大小に拘わらず、物品の姿勢が不安定になることなく姿勢変更手段に渡すことができる集積装置を提供する。
【解決手段】物品Mを水平姿勢で第1の方向Xに搬送する搬送手段10と、物品Mを受け取って、物品Mの側面が第1の方向Xおよび鉛直方向に沿った起立姿勢に姿勢を変更させる姿勢変更手段20と、物品Mを第1の方向Xに直交する第2の方向に重ねた整列状態となるように集合させる整列手段40とを備え、搬送手段10が第1の方向Xに伸縮可能で、搬送される物品Mの第1の方向Xの長さに応じて搬送手段10が伸縮して搬送手段10と姿勢変更手段20との間の空間の距離を変更可能であることを特徴とする。
(もっと読む)
箱詰装置
【課題】本発明は、個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に詰める箱詰装置において、袋の厚みの偏りによる不都合に対応することを目的とする。
【解決手段】個別の袋を複数集積して一群とし、その一群の袋を規定サイズの箱に繰り返し詰める箱詰装置であって、前記各個別の袋の厚みを検出する厚み検出手段と、前記検出手段により検出される厚みに基づいて、前記一群の袋を前記規定サイズの箱に詰めることの適否を判断する判断手段と、記判断手段によって不適と判断される場合に、前記一群の袋のうち交換すべき袋を選択する選択手段と、を備えることを特徴とする。
(もっと読む)
物品箱詰め装置
【課題】 従来の物品箱詰め装置は、物品を定位置で積層するのに、簡単な構成で、処理スピードが速く、且つきれいに整列させた状態で積層できるものはなかった。
【解決手段】 コンベア装置1で順次搬送されてくる平面視矩形で薄形の物品Yをコンベア終端部1aから順次無停止状態で送出して、各物品Yをコンベア終端部1aの下方で待ち受ける収納箱X内に所定個数だけ積層状態で収納し得るようにした物品箱詰め装置において、コンベア終端部1aに、該コンベア終端部から送出される物品Yを乗り越させて減速させた後、表裏反転させて落下させるための物品減速反転部材2を取付けていることにより、物品Yを収納箱X内に、簡単な構成で、処理スピードが速く、且つきれいに整列状態で収納・積層できるようにした。
(もっと読む)
部材を箱に包装する装置およびその方法
【課題】部材を箱内に正確に載置する。
【解決手段】部材20を箱23に包装する装置1は、部材20を搬送方向に供給するコンベヤ2と、圧力板14を備えているプッシュ装置13とを備えており、圧力板14は、少なくとも1つの部材20を、閉位置から開位置までおよびその逆に移動しうるフラップ9上で移動させるために、搬送方向に対し横断する方向にのびた水平プッシュ方向に移動可能であり、箱20は、フラップ9の下方に位置決め可能であるものである。装置は、さらに、フラップ9の両側に位置させられた2つのガイド板5、6を備えており、ガイド板5、6は、圧力板14に対し横断する方向にのびている。装置は、圧力板14と平行にのびかつプッシュ方向に移動しうる保持板17を備えている。装置は、さらに、保持板17およびプッシュ装置13の間に位置させられたストッパを備えており、ストッパは、フラップ9の上方に、部材20の高さより小さい一定距離をおいて位置させられており、部材20および/またはストッパが、フラップ9上の部材20移動間に変形可能である。
(もっと読む)
箱詰め装置及び箱詰め方法
【課題】物品群の保持への床の開閉動作の影響を排除することによって、箱詰め作業のトラブルを抑制する箱詰め装置及び箱詰め方法を提供する。
【解決手段】物品を整列させてなる物品群を整列方向から挟圧する挟圧ステップS3と、挟圧された物品群が載っている床を開放する開放ステップS7と、挟圧された前記物品群の上面に吸引ヘッドを接触させて物品群の上面を吸引して保持する保持ステップS4と、開放ステップS7後に吸引ヘッドを降下させることによって床の下方の外装箱に物品群を押し込む押し込みステップS8と、を有する、箱詰め方法であって、開放ステップS7の前に吸引ヘッドを物品群が床から離れる程度上昇させた状態とする上昇ステップS5を有する。
(もっと読む)
製品流れの調整方法とこのような方法を実施するためのレイアウト
本発明は、2つのライン(F1、F2)の製品(Pn、P’n)の流れ(F)を調整することを目的とする調整方法に関し、この調整方法は、ライン(F1、F2)の一方に属する第1の製品(Pn、P’n)と、すぐ上流に位置し、ライン(F1、F2)の他方に属する第2の製品(Pn、P’n)との間隔(E)の値が、第1の設定値(PAS1)より小さいときに減速させる、第1のステップと、下流にある、第1のライン(F1)の製品(Pn)と、すぐ上流に位置する、近接する、第2のライン(F2)の製品(P’n)との間隔(E)の値が、第2の設定値(PAS2)より小さいときに減速させる、第2のステップと、を少なくとも備えることと、前記第1の減速ステップおよび第2の減速ステップは、キャビティ(Ai)へ移送する装置(24)に応じて決定されるシーケンス(PAS1、PAS2)に従って、第1および第2のライン(F1、F2)の製品(Pn、P’n)の間隔(E、E1、E2)の位相をそろえるために、それぞれ選択的に実施されることと、を特徴とする。 (もっと読む)
フラップ開口装置およびこれを備えた箱詰め装置
【課題】段ボール箱のフラップを開口した状態に確実に保持して、箱詰め工程における歩留まりを上げることができるフラップ開口装置およびこれを備えた箱詰め装置を提供する。
【解決手段】箱詰め装置1においては、上部フラップ保持部82が、上面フラップYaを内面側から係止している。また、ガイド部材83は、左右側面フラップYb・Ycを内面側から係止している。また、ツメ部71が定位置に固定配置されており、第1搬送機構61が、ツメ部71が段ボール箱Yのフラップを開口できる位置まで段ボール箱Yを搬送する。
(もっと読む)
搬送装置およびこれを備えた箱詰め装置
【課題】整列させた物品列の長さが変化した場合でも、プッシャを交換することなく処理を行うことが可能な搬送装置およびこれを備えた箱詰め装置を提供する。
【解決手段】箱詰め装置では、リフト機構53上において、両側を支持部材53b,53cによって支持された状態で載置された複数の商品Xの束を横送りする際には、所定の間隔で切り込みが形成されたプッシャ52aによって商品Xの束の整列方向に交差する方向に商品Xの束を押し出す。
(もっと読む)
瓶整列装置及び瓶自動収納方法
【課題】瓶の収納ケースへの収納を効率良く行なう。
【解決手段】支持台7上に設けた2つの瓶取出位置7a,7bの間に1列の瓶1を搬入する搬入コンベア8と、搬入された1列のの瓶1を係止する係止部材10と、各瓶取出位置7a,7bにおいて搬入コンベア8と直角方向に配設された複数の固定ガイド14a,14bと、固定ガイド14a,14bと直角方向に配設され、各瓶取出位置7a,7bにおいて固定ガイド14a,14bと平行な方向に移動可能な複数のスライドガイド15とから瓶整列装置を構成し、スライドガイド15の押圧移動により複数列の瓶1をスライドガイド15と固定ガイド14a,14bとにより各瓶取出位置7a,7bに交互に整列させ、整列された複数の瓶1を敏把持装置により一括把持し、一括移動し、収納ケース20に一括収納する。
(もっと読む)
121 - 140 / 195
[ Back to top ]