
Fターム[3F072AA17]の内容
Fターム[3F072AA17]に分類される特許
1 - 20 / 23
物体移動装置
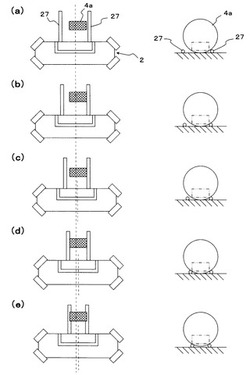
【課題】構造を複雑化させることなく、リーダ台車並びにフォロワ台車の台車本体の幅方向中心位置で物体をリフトアップしてバランス良く支持し得る物体移動装置を提供する。
【解決手段】一対のリフトバー27を車両4の接地ポイントとしての車輪4aの両側から互いに近接させる際、一方のリフトバー27が他方のリフトバー27より先に車輪4aに接触した場合、該一方のリフトバー27が車輪4aから受ける力に基づき、該力の作用する方向へ台車本体2を移動させつつ前記一対のリフトバー27を互いに近接させ、前記他方のリフトバー27が車輪4aに接触した時点で前記台車本体2を停止させるよう構成してある。
(もっと読む)
ワーク反転装置

【課題】作業員の人力を介在させ、かつ装置の動作工程を集約することによって、装置の構成を簡素化したワーク反転装置を実現する。
【解決手段】ワーク表面の形状に合わせた把持体を有する一対のクランプアーム60と、該クランプアームをワークに対して把持位置又は非把持位置に動作させる回動軸52とからなるワーククランプ装置18と、該ワーククランプ装置を回動軸52の軸線を中心に反転可能に支持する昇降台46と、エアシリンダ26のピストンロッド32に設けられ該ピストンロッドの前進時に回動軸52に係合して回動軸52をワーク把持位置固定するカム42と、該ピストンロッドの前進時にカム42を該昇降台より先行上昇させ、該ピストンロッドの後退時に該昇降台を先行下降させる把持ロック機構98とを備え、ワークの昇降時にクランプアーム60を常に把持位置にロックさせるようにした。
(もっと読む)
搬送位置決め方法及び装置
【課題】周囲4面のうち例えば両側面が複雑な形状のワークに対して汎用性があり、両側面の形状が複雑な多くの機種のワークに対して汎用性がある搬送位置決め方法及び装置を提供すること。
【解決手段】搬送位置決め方法は、搬送されるシリンダブロック1の前方端部2を基準面41に対して当接させるステップS2と、シリンダブロックの側部5に設定された基準点6に対して計測器60のロッド62を基準面と平行に突き当てることにより原点から基準点までの距離を計測するステップS3と、シリンダブロックをカメラ70で撮影することによりシリンダブロックの機種を判別するステップS4と、計測された距離と判別された機種とによりシリンダブロックの中心位置を割り出すステップS5と、割り出されたシリンダブロックの中心位置にローダ30を移動させるステップS6と、を含む。
(もっと読む)
吸着装置及びワーク搬送装置
【課題】吸着パッドを所定の真空度にする時間を短縮することができる吸着装置及びワーク搬送装置を提供する。
【解決手段】本発明のワーク搬送装置1は、搬送対象物であるワークwの表面に配置される吸着パッド21を真空ポンプ22により真空引きしてワークwを把持する吸着装置2と、吸着パッド21を支持するクロスバー31とクロスバー31を移動させる駆動アーム32と駆動アーム32を移動可能に支持する支持部材33とを有する構造部材3と、を備えており、前記吸着装置2は、支持部材33に形成された真空タンク4と、真空タンク4と吸着パッド21との間に配置された第一吸気流路5と、第一吸気流路5に配置された電磁弁6と、真空タンク4と真空ポンプ22との間に配置された第二吸気流路7と、を有する。
(もっと読む)
ターンテーブル装置
【課題】 構成を簡単にしてコスト面を有利にする。
【解決手段】 床下のピットPに設けられて伸縮時に上端を昇降させる複数本の伸縮体1と、この複数本の伸縮体1の上端に担持されて伸縮体1の伸縮時に昇降するターンテーブル2とを有してなるターンテーブル装置において、ピットPに水平方向の旋回を可能に設置される基台フレーム3を有し、この基台フレーム3に伸縮体1の基端を担持させて伸縮体1の上端を上方に対向させ、この伸縮体1がターンテーブル2の下方に同心に位置決められるガイドフレーム4を上端で担持し、このガイドフレーム4がターンテーブル2を旋回可能に担持してなる。
(もっと読む)
プレス用オートパレタイザ
【課題】ロボットの必要数が少なく、サイクルタイムを大幅に短縮できるプレス用オートパレタイザを提供する。
【解決手段】プレスライン3に沿ってワーク1を一定ピッチで搬送するワーク搬送装置12と、ワーク搬送装置上で隣接する1対のワーク1をセンタリングするセンタリング装置14A,14Bと、ワーク搬送装置の幅方向に隣接しセンタリング装置14A,14Bのプレスライン方向中間位置に位置する移載ロボット16と、ワーク搬送装置の幅方向に隣接しセンタリング装置のプレスライン方向同一位置に位置するパレットステーション18A,18Bとを備える。移載ロボット16は、上流側及び下流側のセンタリング装置14A,14B上のワーク1をそれぞれのパレットステーション18A,18Bにそれぞれ上流側回り及び下流側回りで移載する。
(もっと読む)
ワーク吸着移送システムにおける給排気制御装置
【課題】個々の吸着パッドに取り付けられる小型軽量の電動エアーポンプによって吸着パッドの真空吸引を行い得るとともに、該電動エアーポンプによって真空破壊用の圧搾エアーを生成し得るワーク吸着移送システムの給排気制御装置を提供する。
【解決手段】電動エアーポンプ1の吸気口2と該吸気口2に接続される吸着パッド23との間に配設した第一電磁弁22を、吸着パッド23内の真空度が所定真空度未満の場合には吸着パッド23内のエアーを吸引する内気吸引状態に切り換え、吸着パッド23内の真空度が所定真空度に達した場合には外気を吸引する外気吸引状態に切り換えられるようにして、電動エアーポンプ1の吸気口2からエアーを吸引し、排気口3から吐出されるエアーをエアー貯留槽28に貯留するようにした。これにより、電動エアーポンプ1によって吸着パッド23の真空吸引を行い得るとともに、該電動エアーポンプ1によって真空破壊用の圧搾エアーが生成できる。
(もっと読む)
サブパレット移載装置
【課題】基準パレット内からサブパレットを簡単に取り出すことができ、また取り出したサブパレットを確実に基準パレット上に移載することができるサブパレット移載装置を提供する。
【解決手段】シリンダユニットを駆動することで、操作爪片107を前進させ基準パレット10に設けたストッパ18をスプリングに抗して水平状態にし、サブパレット20を引き出し可能な状態にする。また予め昇降部材110を最下限位置にし、シリンダユニット123を駆動し、ロッドを前進せしめ、ロッド先端の係合片をサブパレット20のT字溝に進入させ、次いでモータ(駆動部材)によってロッドを90°回動せしめることで係合片をT字溝に係合させ、次いでシリンダユニット123を逆方向に駆動し、収納空間Sからサブパレット20をサブパレット受渡しユニット130上に引き出す。
(もっと読む)
重量物用ターンテーブル装置
【課題】専用のケーブル収容スペースをなくして施工費を低減するとともに、外観見栄えを良くする。
【解決手段】躯体に設けられた主制御盤51から延びる通電ケーブル53をターンテーブル13に接続する。基端がターンテーブル13の旋回中心C0から外れた位置で躯体に水平回転自在に枢着された第1アーム59と、先端が第1アーム59先端に水平回転自在に枢着され基端がターンテーブル13下面の旋回中心C0から外れた位置に水平回転自在に枢着された第2アーム61とを備えたケーブル処理装置57をターンテーブル13直下に設ける。ターンテーブル13旋回時、第1アーム59及び第2アーム61の共働により通電ケーブル53をターンテーブル13の旋回動作に追従して過不足なく案内させる。
(もっと読む)
重量物用ターンテーブル装置
【課題】専用のケーブル収容スペースをなくして施工費を低減するとともに、外観見栄えを良くする。
【解決手段】躯体に設けられた主制御盤51から延びる通電ケーブル53をターンテーブル13に接続する。ターンテーブル13直下の躯体に可動式ケーブル処理装置57を設け、ターンテーブル13旋回時、通電ケーブル53が過不足なく案内されるようにケーブル処理装置57をターンテーブル13の旋回動作に追従して移動させる。
(もっと読む)
供給部品の位置決め装置および位置決め方法
【課題】ハンガーで吊下げられたワークの抜き出し工程において自動取出しを可能とするに好適な供給部品の位置決め装置および位置決め方法を提供する。
【解決手段】フック22に係合孔W1を嵌合させて吊下げられたパネル状ワークWの左右の縁辺W2、W3に、上下一対のV字状ゲージ51A、52Aを左右方向外側から接近させて係合させることによりワーク面の傾斜およびワーク面に垂直な軸回りの回転を補正するワーク姿勢矯正手段としてのゲージ装置51、52と、前記ワーク姿勢矯正手段51、52の係合により姿勢が補正されたワークWを予め設定した量だけ上昇させて、ワークWの係合孔W1からフック22を離脱させる昇降手段としてのゲージ装置53と、を備える。
(もっと読む)
ワーク反転装置
【課題】比較的簡単な構成で、安価で、しかも反転動作中にワークが落下するようなトラブルが確実に回避できる安全性の高いワーク反転装置を提供すること。
【解決手段】クランプ部2と、クランプ部2を回転させる回転駆動部とを有する。クランプ部2は、第1クランプ片及び第2クランプ片と、両者を連動させる連動機構部と、第1クランプ片の開閉移動に伴って開閉移動するガイド棒25とを有する。ガイド棒25は、棒状本体部と大径部251とを有する。クランプ部2の側方には、ガイドプレート4が配設されており、ガイドプレート4の配設位置は、ガイド棒25の大径部251の移動経路の途中に設定してある。ガイドプレート4には、ガイド棒25の大径部251がガイドプレート4を貫通移動可能な非干渉溝部41、42を設けてあると共に、ガイドプレート4をガイド棒25の大径部251が貫通移動することを妨げる干渉溝部43が設けられている。
(もっと読む)
ワーク取り出し方法及びワーク取り出し装置
【課題】各パレット間でその高さ及び幅に寸法誤差があってもパレットからワーク取り出し装置でワークを取り出す作業を自動化する。
【解決手段】第1のパレット4の支柱8に形成されたカム溝に軸をスライド自在に係合させて略水平状態となる第1の状態とガラス3を取り出せる跳ね上げ状態となる第2の状態との間で開閉自在とされる仕切板9を複数有し、略水平状態となる第1の状態にある各仕切板9の上にガラス3を平置きして該仕切板9と該ガラス3とを交互に段積みしてなるパレット4からガラス3を取り出すワーク取り出し装置。このワーク取り出し装置7では、第1の状態にある仕切板9の下に入り込んでこの仕切板9を跳ね上げ、該仕切板9を前記ガラス3が取り出せる状態となる第2の状態とする跳ね上げ部材と、仕切板9が跳ね上げられることにより取り出し可能とされたガラス3を保持する吸着保持機構部と、を備える。
(もっと読む)
車両フレーム反転装置及び車両フレームの反転方法
【課題】小型で低コストの車両フレーム反転装置を提供する。
【解決手段】第1レール5及び第2レール6により略L字状をなす第1形態と、第2レールが第1レールに対して重ねられるように折り畳まれる第2形態と、に変化可能な折り畳み自在なガイドレール1と、車両フレーム36を挟み込んでクランプする固定側クランプ部材16A及び可動側クランプ部材16Bからなるクランプ部材と、クランプ部材を着脱自在に取り付けガイドレールに沿ってスライド自在とされるスライド部材17と、を備えた車両フレーム保持機構部2とを備える。そして、車両フレーム反転装置では、ガイドレールを第1形態とし、車両フレーム保持機構部を第1レールに沿ってスライドさせながら第1レールから第2レールへと移動させた後、第2レールを第1レールに対して重ねるように折り畳んで前記ガイドレールを第2形態とすることにより前記車両フレームを反転させる。
(もっと読む)
搬送装置
【課題】被搬送物の製造装置の稼動率低下を防止でき、かつ簡便な構造の搬送装置を提供することを目的とする。
【解決手段】複数の被搬送物3を取り出し位置まで順次に搬送するコンベア1と、コンベア1にて移動している複数の被搬送物3を各別にコンベア1から離して支持すると共に、支持した被搬送物3をコンベア1に戻す複数のリフター10と、コンベア1にて移動している被搬送物3を検出する複数のセンサ15とを備え、取り出し位置におけるリフター10aは、対応するセンサ15aが被搬送物3を検出した場合には被搬送物3を支持し、取り出し位置以外におけるリフター10b〜10fは、対応するセンサ15b〜15fが被搬送物3を検出しかつ搬送方向直前のリフター10が支持状態である場合には検出した被移送物3を支持する一方、搬送方向直前のリフター10が支持状態を解除した場合には被搬送物3をコンベア1に戻す。
(もっと読む)
ハンドリング装置
【課題】異なる部品を扱う上での柔軟性のレベルが高いハンドリング装置を提供する。
【解決手段】ハンドリング装置11は、キャリアユニット12を備える。キャリアユニット12は、ロボットアームに連結するための連結部13と、複数の作動モジュール14と、を備える。複数の作動モジュール14のそれぞれは、作動装置18を取り付けるための少なくとも1つの取付インターフェース17を備える。作動モジュールのそれぞれには、取付インターフェースの位置を設定するための調整手段が設けられる。調整手段は、制御装置からの電気的な制御信号によって制御される、複数の位置設定駆動部19、20,21を備える。複数の位置設定駆動部19、20、21は、x,y,z座標系を有するデカルト座標系におけるx方向、y方向およびz方向に取付インターフェースを移動できる。
(もっと読む)
吸着装置及びこの吸着装置を用いた吸着方法
【課題】 湾曲部や傾斜部等を有するワークを吸着保持する場合でも、ワークの表面に擦り傷等が発生するのを防止して確実に保持できるようにする。
【解決手段】 ピストン部材6が内装される円筒部2の下方に支持部材4を配設し、この支持部材4に、ピストンロッド8を挿通させるための小径孔10と大径孔11を設け、ピストンロッド8の先端にバキュームカップ16を取付ける。支持部材4の側面から大径孔11に向けて第1吸引孔13を穿設し、ピストンロッド8の中心部に、バキュームカップ16内に開口する第3吸引孔17を設け、大径孔11と第3吸引孔17を連通する第2吸引孔18を設ける。ピストン室5に連通する大径孔11の連通面積に較べて、第3吸引孔17に連通する第2吸引孔18の連通面積を小さくする。
(もっと読む)
ワークの移載装置および移載方法
【課題】温度変化による建屋架構の伸縮等によってガイドレールが位置ずれし、ガイドレールの位置ずれによってキャリヤの位置がワークをキャリヤに移載するマニピュレータに対して相対的にずれた場合でも、精度よく、かつ短時間にワークの移載をおこなうことのできるワークの移載装置および移載方法を提供する。
【解決手段】鉛直方向に延設する昇降ガイド部材1と、昇降ガイド部材1に昇降自在に装着されたロボットアーム2と、ワーク(ドアD)を支持する支持部材26と、支持部材26とキャリヤFとの離間を計測する計測装置とがロボットアーム2の先端に取付けられてなる移載装置10である。計測装置は、複数のリミットスイッチと、キャリヤまで伸長しながら該複数のリミットスイッチをそれぞれONまたはOFFさせることで離間を計測する計測部材とから構成されている。
(もっと読む)
ワーク移し替え方法、ワーク移し替えシステム及びワーク移し替え装置
【課題】視覚センサーなどを使用することなくガラスを機械的手段によって精度良く位置決めしてパレットから別のパレットへ移し替えることのできる低設備で且つメンテナンスも容易に行えるガラス移し替え装置を提供する。
【解決手段】車体の組み立て生産順番に従って、第1のパレットから所定のガラス3を取り出した後、組み立て生産順番となるように第2のパレットに移し替えて順次配列させる作業を繰り返し行うガラス移し替え装置。この装置では、ガラス3を吸着保持する吸着保持機構部27とガラスの奥行き方向のガラス保持位置をハンドリングロボット2の基準位置に合致させる位置調整機構部28とを備えた吸着保持位置調整手段21と、手首部分とハンドフレームとの間に設けられ、吸着保持位置調整手段で保持したガラスの幅方向及び縦方向のガラス保持位置を、ハンドリングロボット2の基準位置に合致させるガラス保持位置調整手段23とを備える。
(もっと読む)
ワークの自動掛け降し方法、およびその方法を使用したワークの自動掛け降し装置
【課題】 従来手作業で行われていた表面処理装置などの中を移動するワーク移送用ハンガーへのワークの掛け作業及び処理完了後のワークの降し作業を、作業の省力化と効率向上、更にはワークの表面処理面の品質向上を目的として自動化するための方法、およびその方法を使用した装置を提供すること。
【解決手段】 密着整列された複数個のワークを、分離整列する工程と、分離整列した複数個のワークを、その分離整列状態のまま串状支持体Kで支持する工程と、分離整列状態のワークを支持した串状支持体KをハンガーHに掛ける工程とを含むこと。
(もっと読む)
1 - 20 / 23
[ Back to top ]