
Fターム[3F072KD22]の内容
特殊移送 (6,503) | 物品保持移載手段(主に往復動)(その他) (1,147) | 台車利用 (64) | 天井台車 (43)
Fターム[3F072KD22]に分類される特許
1 - 20 / 43
搬送装置
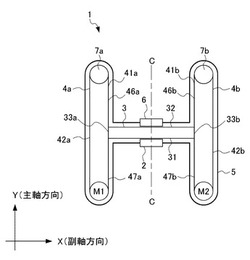
【課題】主軸方向に搬送される被搬送物の軌跡の正確性を向上させる搬送装置を提供する。
【解決手段】副軸方向に延在し、レーザ加工ヘッド2を副軸方向に移動可能に保持する副軸フレーム3と、副軸方向と交差する主軸方向に延在し、副軸フレーム3を主軸方向に移動可能に保持する一対の主軸フレーム4a、4bと、を備え、レーザ加工ヘッド2を主軸方向及び副軸方向に搬送する搬送装置1であって、副軸フレーム3に副軸方向に移動可能に保持され、レーザ加工ヘッド2とは副軸フレーム3の副軸方向における中心線CCを挟んで反対側且つ副軸フレーム3の主軸方向における反対側の位置においてレーザ加工ヘッド2の副軸方向の移動に対して反対方向に移動するカウンタウエイト6を備えた。
(もっと読む)
物品搬送装置

【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
ピックアップ装置
【課題】上下方向に複数枚のトレイが積み上げてのその積層体が傾いても、最上段のトレイを安定して順次ピックアップしていくことができるピックアップ装置を提供する。
【解決手段】上下方向に積み重ねられた複数のトレイ11に対して、その最上段トレイ11Aをピックアップするピックアップ装置である。上下方向に積み重ねられた複数トレイ11が載置される昇降台12と、昇降台12の上昇によって上昇してきた最上段トレイ11Aを保持する複数のトレイ保持機構13と、水平面に対する最上段トレイ11Aの傾斜に対応して各保持機構位置を上下方向に変位させる倣い機構14とを備える。
(もっと読む)
搬送装置
【課題】予め決定された軌道に沿って移動する移動部を有する搬送装置において、残留振動を抑制し、移動に要する時間を最小化することのできる搬送装置を提供する。
【解決手段】移動部2を駆動するための駆動部31とワークを載置できる負荷部32、移動部の加速時、定速時および減速時の各軌道情報を生成する軌道情報生成部5と、軌道情報生成部により生成される軌道情報に基づいて駆動部を作動させるコントローラ4とを備える。軌道情報生成部は、駆動部のエネルギ変換効率に関する効率情報記憶手段、移動部の移動に関する特有情報記憶手段、移動部の移動条件情報記憶手段、移動部の運動特性情報記憶手段、前記運動特性に基づき移動部の残留振動を抑制し、移動部の移動に要する時間を算出する演算手段と、前記演算手段により算出された移動に要する時間をパラメータに含む評価関数の値が最小となる軌道情報を決定する軌道情報決定手段とを備える。
(もっと読む)
物品供給装置
【課題】幅の広い平面(第1の面)を上下にして搬送されてきた物品を、90度回転させて立てた状態で箱詰めするために供給する装置を提供する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
(もっと読む)
昇降装置
【課題】搬送通路との干渉を避け、且つワークを安定して昇降させる。
【解決手段】ワークを搬送する搬送通路を挟んで配置される複数の垂直軸と、各垂直軸に個別に対応して設けられ、ワークを支持可能な複数のアームと、各アームに個別に対応して設けられ、対応するアームを垂直軸に沿って昇降させる複数の昇降アクチュエータと、複数の昇降アクチュエータを駆動制御する昇降制御部と、各アームに個別に設けられ、対応するアームを水平面内で揺動させる複数の揺動アクチュエータと、前記複数の揺動アクチュエータを駆動制御する揺動制御部と、を備え、昇降制御部より与えられる指令に基づいて各昇降アクチュエータが駆動され、揺動制御部より与えられる指令に基づいて各揺動アクチュエータが駆動される昇降装置において、アームが、垂直軸に連結されて水平面内を揺動可能な平行リンク部と、平行リンク部に連結されて水平面内を揺動可能な先端部とを有する。
(もっと読む)
異物排除装置
【課題】製造ラインで原材料を検査して異物を排除する際に、異物と共に排除される原材料の量を少なくして無駄を省く。
【解決手段】異物排除装置1は、ベルトコンベア2と、搬送される原材料Mに含まれた異物Fを検出するエックス線源4及びセンサ5を有し、位置情報検出手段6により原材料における異物の2次元の位置情報を取得する。さらにくり抜き手段9が該位置情報を受けて異物の2次元の位置に位置決めされ、下降して原材料に切り込むことにより、異物Fと異物Fの周囲にある原材料Mの一部のみを切断して除去する。
(もっと読む)
搬送装置及び搬送方法
【課題】収容物の出し入れを行う面を下側とし、その面のフラップの封止を行うことなく、かつ、収容物の脱落を防止しつつ箱体を搬送する。
【解決手段】開閉自在な左右一対のフラップ201を底面に有する箱体200の搬送装置であって、前記箱体200を保持する保持ユニット10と、保持ユニット移動手段とを備え、前記保持ユニット10は、前記箱体200の上面又は側面において前記箱体200を保持し、前記箱体200を昇降させる昇降手段11と、前記一対のフラップ201のそれぞれに当接し前記フラップ201の開放を規制する一対の当接部材14と、前記一対の当接部材14が前記箱体の下方において互いに近接して前記フラップ201の開放を規制する開放規制位置と、前記一対の当接部材が前記箱体の下方において互いに離間して前記フラップの開放を許容する開放許容位置と、の間で前記一対の当接部材を移動させる当接部材開閉作動手段12とを備えた。
(もっと読む)
吊り下げ型移送装置及びきのこ栽培コンテナ用移送装置
【課題】圧縮空気の複数の配管をなくして装置を簡素化でき、きのこ栽培の工程では雑菌が侵入しにくい環境とすることができる吊り下げ型移送装置を提供すること。
【解決手段】移送物を保持する吊下保持部20を、複数の帯材21を巻き取り繰り出す帯材巻き装置部によって昇降させる吊り下げ型移送装置であって、吊下保持部20が、複数の帯材21によって吊下げられる実質的に方形の吊下基体23と、吊下基体23の対称位置にある一対の縁のそれぞれに中途部が回動可能に装着され、下部が内側へ回動した際に移送物に接触して保持するように設けられた回動保持部材30と、吊下基体23上に載置され、回動軸41及びリンク連結部42を有し、リンク連結部42を回動させる回動駆動部40と、一対の回動保持部材30、30の上部31とリンク連結部42とに連結された一対のリンク50、50を具備する。
(もっと読む)
磁気吸着装置
【課題】 鉄板に直接接触する永久磁石に対して、それを支持するばねによって永久磁石の鉄板からの引き剥がし動作を補償しようとする磁気吸着装置は、塗装が施された鉄板上では、ばね力と磁気吸着力のバランスがずれ、永久磁石の引き剥がし動作に大きな力が必要となるのでそれを防ぐ機構が必要となる。
【解決手段】磁性体でなる被吸着体1に対接する外側フレーム10に対し、高さを調整可能な内側フレーム15を設け、これに対して、他端に永久磁石12を取り付けた支持ばね機構13を係止する構造を導入し、鉄板上に厚さtの非磁性体塗装がある場合には、内側フレームの高さを同じ距離tだけ変更する機構を導入することで、永久磁石12と支持ばね機構13の力が、鉄板の塗装厚さと、永久磁石と被吸着体との間隙にかかわらず、常に平衡するように構成する。
(もっと読む)
ワーク移載装置およびワーク移載方法
【課題】使用するアクチュエータ数の削減に好適なワーク移載装置を提供する。
【解決手段】ワーク搬送手段5おける昇降手段6を、走行手段4に対して走行方向に相対移動可能であり且つ弾性手段(17)により相対移動範囲の中立位置に復帰付勢するよう配置され、前記走行手段4の受取り位置Bおよび受渡し位置Cへの所定以上の接近により、搬送路に設けたストッパ10により停止されて走行手段4がストローク限に向かって前記中立位置から離れる方向に相対移動することを利用してフィンガ爪8を下降させ、走行手段4の受取り位置Bおよび受渡し位置Cからの離脱により、搬送路に設けた前記ストッパ10による相対移動状態から中立位置に復帰することを利用してフィンガ爪8を上昇させるようにした。
(もっと読む)
ワーク吸着ヘッド
【課題】パレット上に既に載置された他のワークに影響を与えずに、小型軽量のワークをパレット上に正しく載置するワーク吸着ヘッドを提供する。
【解決手段】ワーク吸着ヘッド23は、内管31、外管32、飛散防止カバー33などからなる多重構造となっており、内管31と外管32との間に形作られる隙間41と、外管32の側面に設けられたエアー排出路43が構成される。飛散防止カバー33は、吸着したレンズ11をパレット12bに載置するときにバネ34によってパレット12bに押し当てられ、吸着されたレンズ11をノズル部27から離脱するときに吸着口39から吐出されるエアー48を閉じ込める。飛散防止カバー33によって閉じ込められたエアー48は、パレット12bに既に載置された他のレンズ11に影響を与えないようにエアー排出路43を通して排出される。
(もっと読む)
部材搬送装置
【課題】より少ないスペースで被搬送部材の搬送方向を変換しつつ搬送できる部材搬送装置を得る。
【解決手段】複数のタイヤ14を一括で吊り下げる一括投入用レール38は、キュアスターボールによって、横行方向(矢印A1及び反対方向)と、加硫缶18への投入方向(矢印B1及び反対方向)へ移動可能とされる。一方の移動体32が加硫缶18内にあるときに、これから独立して、他方の移動体32が横行方向へと移動できる。2つの移動体を連結した構成では、移動体を退避させるスペースが必要となるが、本発明ではこのようなスペースが不要なので、より少ないスペースで被搬送部材の搬送方向を変換しつつ搬送できる。
(もっと読む)
物品移送装置
【解決手段】 ケーサ3を構成するロボット6の作業ヘッド32は、X方向に移動する12本のステー42と、Y方向に移動する3本のシャフト43とが交差する位置に連結されるとともにグリッパ33を保持する36個の保持部材35とを備えている。
上記ステーはX方向パンタグラフ機構48によって移動し、該X方向パンタグラフ機構を構成する第4〜第8支軸56d〜56hには、リンク部材55の端部同士を同一軸上で回転するように保持する同軸状態(a)と、これを離隔させた位置で回転するように保持する異軸状態(b)とに切換える第1〜第5連結手段57a〜57eが設けられている。
この連結手段により、同軸状態とした際における隣接するグリッパの間隔と、異軸状態とした際における隣接するグリッパの間隔とを異ならせることができる。
【効果】 グリッパの間隔を任意に変更することができ、多彩な収納パターンに対応することができる。
(もっと読む)
電子部品収納用基板の搬送装置
【課題】電子部品収納用基板への塵埃の落下を防止して歩留が向上でき、電子部品収納用基板のコストアップを防止する簡単で安価な電子部品収納用基板の搬送装置を提供する。
【解決手段】基板11を載置するための複数の独自に稼動するステージ12、12aと、基板11を保持するための連結する吸着部15、15aを備える吸着ユニット16と、基板11を移載して移動させるためのコンベアー17を有する電子部品収納用基板の搬送装置10であって、ステージ12、12aを上下方向に稼動させるためのそれぞれの下方部にステージ上下動稼動部を設けるステージ上下稼動手段と、吸着ユニット16を上下方向に稼動させるための吸着ユニット上下動稼動部と、吸着ユニット16を前後方向に稼動させるための吸着ユニット前後動稼動部をそれぞれステージ12、12a上面より下方の側部に設ける吸着ユニット上下稼動手段と、吸着ユニット前後稼動手段を有する。
(もっと読む)
長尺ウレタン仕分け装置及び長尺ウレタン仕分け方法
【課題】切れ目が入れられた長尺ウレタン材料を所定長さの長尺ウレタン製品に切り離してから、各長尺ウレタン製品を仕分けて収容するまでの工程において、作業者の工数を減らすことが可能な長尺ウレタン仕分け装置を提供する。
【解決手段】切断装置により切断箇所に切れ目が形成された長尺ウレタン材料Aを載置する載置台1と、この載置台1に載置されている長尺ウレタン材料Aの各ブレード部分を個別に吸着するための複数の吸着ユニット51と、この吸着ユニット51を長尺ウレタン材料の長手方向に沿って移動させるためのボールネジ機構58と、切り離されたブレードを収容するための収容装置60と、この収容装置60に形成された所定の収容箇所に複数の吸着ユニット51を移動させるための駆動部と、所定の収容箇所にブレードを収容できるように、ボールネジ機構58、駆動部、吸着ユニット51の動作を制御する制御部と、を備えている。
(もっと読む)
部品供給装置
【課題】 プラスチック等の材料からできた成型品等の部品の供給において、部品を傷付けることなく、作業者の負荷が小さく、設備コストを安価に済ますことができる部品供給装置を提供する。
【解決手段】 列方向の移動を制限するための行方向に延長する仕切板を備え行方向には移動可能に部品を行列配置するトレーと、水平となる角度のゼロ傾斜角度と、行方向へ部品が滑り落ちる滑落傾斜角度との間でトレーを傾斜させる傾斜角付与手段と、トレーから滑り落ちた部品を載置して列方向に搬送するコンベヤとを具備する部品供給装置。
(もっと読む)
物品移載装置
【課題】横倒姿勢のタイヤのように上面に開口部を有しその下側に広い空間を有する様々なサイズの物品を傷や変形を生じさせることなく確実、安全に持ち上げて移載する。
【解決手段】昇降可能な基台と、基台の下側に垂下され内外方向に水平移動する複数のフックを備える。各フックの垂直部の外側面にタッチセンサを取り付ける。基台が下降して各フックが物品の空間内に入りきった状態にて水平光軸が物品に遮られる位置に投受光式センサを取り付ける。基台を下降させ投受光式センサが物品を検出した時点で下降を停止して各フックを外方向に移動させ、全てのタッチセンサが物品を検知した時に移動を停止させる。直後に各フックを僅かに内方向に後退させる。その状態で基台を上昇させ各フックの垂直部下端から略水平に延びる爪部にて物品の開口端部下側を支えて持ち上げる。
(もっと読む)
棒状体の分離方法及び分離装置
【課題】 棒状体の束から棒状体を分離する方法および装置を提供する。
【解決手段】 分離装置(1)において、束(5)の最上部にある本体(6)の表面を検出手段(17)により測定し、その本体(6)を検出手段(17)の横方向に沿って第1保持手段(18)により把持し、垂直に持ち上げる。次に、第2保持手段(19)が第1保持手段(18)の横方向で本体(6)の下部に係止する。本体(6)を束(5)から持ち上げた状態で、第2保持手段(18)を本体(6)の他端部に移動させる。その後、本体(6)を2つの保持手段(18、19)によって置き場へ移動させる。
(もっと読む)
ワーク搬送装置
【課題】上流端のステーションから下流端のステーションに亘って延在するガイドレールに夫々移動自在に支持される複数の搬送ユニットと、何れか1つの搬送ユニットに移動力を付与する駆動源と、隣接する搬送ユニット同士を連結する中継ぎ部材とを備えるワーク搬送装置において、搬送ユニットに邪魔されずに中間のステーションでのメンテナンス作業を行うことができるワーク搬送装置の提供。
【解決手段】中継ぎ部材8は隣接する搬送ユニット71,72の一方に固定される半部8aと他方に固定される半部8bとに分割され、中継ぎ部材8の両半部8a,8bを分離自在に連結する連結具8cを備える。ステーションST2でのメンテナンス作業に際しては、中継ぎ部材8の両半部8a,8bを分離し、搬送ユニット72をステーションST3に移動させる。
(もっと読む)
1 - 20 / 43
[ Back to top ]