
Fターム[3F072KD27]の内容
特殊移送 (6,503) | 物品保持移載手段(主に往復動)(その他) (1,147) | 往復動 (266) | 移動軌跡が直線 (146)
Fターム[3F072KD27]に分類される特許
61 - 80 / 146
2次元移動装置及び搬送装置
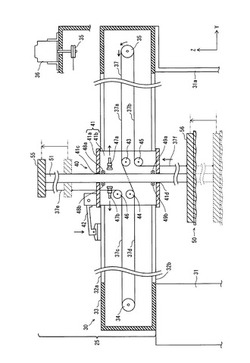
【課題】2次元経路で或る機構の固定先を移動可能な2次元移動装置を提供する。
【解決手段】垂直移動ユニット部50の一方の端に配された下板56と、水平移動ユニット部40及び垂直移動ユニット部50の滑動をそれぞれ制動する水平ブレーキ部42及び垂直ブレーキ部47a、47bとを備え、さらに、レールの両端側に、それぞれ駆動プーリ35及び従動プーリ34が軸支され、従動プーリ46及び従動プーリ45が直線経路の中心寄りに軸支され、1本のワイヤ37が、垂直移動ユニット部50の一方の端部近傍から延出され、従動プーリ46、従動プーリ34、駆動プーリ35及び従動プーリ45にこの順で巻き架けられて、垂直移動ユニット部50の他方の端部近傍に接続されており、駆動プーリ35を回転駆動する一方で、水平ブレーキ部42及び垂直ブレーキ部47a、47bを択一的に作動させて、水平移動ユニット部40と垂直移動ユニット部50とを個別に滑動させる。
(もっと読む)
板材搬送収納システムおよび板材搬送収納方法

【課題】 板材を効率良く搬送して収納することができ、その収納状態で板材の成形部分が潰れたりすることがない板材搬送収納システムを提供する。
【解決手段】 板材ストッカ4と、板材搬送装置とを備える。板材ストッカ4は、ストッカフレーム30内のトレイ収納部32に収納された内側位置Aとトレイ収納部32から引き出された外側位置Bとに位置切換自在な複数段のトレイ34を有する。板材搬送装置は、板材W2を保持可能な板材保持手段20と、この板材保持手段20を前記トレイの引き出し方向である位置切換方向と平行に移動させる機能を有する移動手段とを有する。この移動手段により板材保持手段20を前記位置切換方向と平行に移動させることで、外側位置Bにある複数段のトレイ34のうち最上段のトレイ34を内側位置Aに位置切換させ、かつその1段下のトレイ34の上方に板材保持手段20を位置させる。
(もっと読む)
物品移送装置
【解決手段】 ケーサ3を構成するロボット6の作業ヘッド32は、X方向に移動する12本のステー42と、Y方向に移動する3本のシャフト43とが交差する位置に連結されるとともにグリッパ33を保持する36個の保持部材35とを備えている。
上記ステーはX方向パンタグラフ機構48によって移動し、該X方向パンタグラフ機構を構成する第4〜第8支軸56d〜56hには、リンク部材55の端部同士を同一軸上で回転するように保持する同軸状態(a)と、これを離隔させた位置で回転するように保持する異軸状態(b)とに切換える第1〜第5連結手段57a〜57eが設けられている。
この連結手段により、同軸状態とした際における隣接するグリッパの間隔と、異軸状態とした際における隣接するグリッパの間隔とを異ならせることができる。
【効果】 グリッパの間隔を任意に変更することができ、多彩な収納パターンに対応することができる。
(もっと読む)
ピックアンドプレース装置
【課題】装置を小型化し、さらに、溝カムの軌道を極力長くしないようにして移載効率を高めるとともに、溝カムの全体における圧力角を極力小さくして駆動効率を高める。
【解決手段】ピックアンドプレース装置は、垂直長/水平長比が0.15〜0.4である半楕円の全部又は一部を描く部分楕円軌道を有する楕円部7と、直線軌道を有する第一直線部8及び第二直線部9とを含む不動の溝カム6を備える。出力部材20が案内部材17により変位可能に案内され、出力部材20に回転可能に軸着されたローラよりなるカムフォロア22が、溝カム6に前記軌道に沿って変位可能に嵌合され、両交点の中点よりも部分楕円軌道に対し離間する方向にシフトした位置にある軸10を中心に揺動するレバー11により、出力部材20が押圧されて駆動される。
(もっと読む)
バッテリプレートを一直線状に配置するための装置
【課題】バッテリプレート積層体からバッテリプレートを直線状に配置する。
【解決手段】拾い上げ及び解放ユニット16は、互いに隣接した幾つかの真空チャンバの形に分割されている中央の金属中空本体17を有している。これらの真空チャンバの中のいくつかは、穴あき床を有しており、真空源は、穴あき床を有しているこれらの真空チャンバに接続されており、真空源は、第2の組のチャンバに直角に連結されている。断続的な真空によってバッテリプレートを昇降装置11、12から拾い上げることができ、その後、バッテリプレートが解放チャンバに到達するまで、常時の真空によって、穴あき床を有するエンドレスベルト25にプレートを保持することができ、真空の中断によってバッテリプレートを解放することができる。
(もっと読む)
ワーク搬送装置
【課題】独立したアライメント装置を設けることなくワークの位置合わせができるワーク搬送装置を実現する。
【解決手段】搬送機構によってワークを保持し、この搬送機構を前記ワークの搬送方向に沿って移動させることにより前記ワークを搬送するワーク搬送装置において、
前記搬送機構は、前記ワークの保持状態を変化させるアライメント部を有することを特徴とする。
(もっと読む)
電子部品収納用基板の搬送装置
【課題】電子部品収納用基板への塵埃の落下を防止して歩留が向上でき、電子部品収納用基板のコストアップを防止する簡単で安価な電子部品収納用基板の搬送装置を提供する。
【解決手段】基板11を載置するための複数の独自に稼動するステージ12、12aと、基板11を保持するための連結する吸着部15、15aを備える吸着ユニット16と、基板11を移載して移動させるためのコンベアー17を有する電子部品収納用基板の搬送装置10であって、ステージ12、12aを上下方向に稼動させるためのそれぞれの下方部にステージ上下動稼動部を設けるステージ上下稼動手段と、吸着ユニット16を上下方向に稼動させるための吸着ユニット上下動稼動部と、吸着ユニット16を前後方向に稼動させるための吸着ユニット前後動稼動部をそれぞれステージ12、12a上面より下方の側部に設ける吸着ユニット上下稼動手段と、吸着ユニット前後稼動手段を有する。
(もっと読む)
搬送装置および搬送方法
【課題】物品を所定の受取位置からその受取位置よりも下方の所定の搬送位置まで運ぶ搬送装置、およびその搬送装置で実施される搬送方法に関し、受取位置で物品が待たされることを低減する。
【解決手段】第2受け部材22は、載置部212が受けている物品下面91oの所定箇所とは異なる箇所を受ける受け部221を載置部212が受けている物品Wの下面91oに宛がい、受け部221に物品Wを載せた状態で搬送位置まで下降しその後その搬送位置から上昇するものであり、載置部212は、受け部221が物品Wの下面91oに宛がわれると物品Wから離れ、第2受け部材22が搬送位置まで下降する経路から外れた、受取位置とは異なる退避位置まで退避し、第2受け部材22が搬送位置から上昇を開始するまでに受取位置に復帰する。
(もっと読む)
パイプ搬送装置
【課題】同じ空冷ラインを低速搬送と高速搬送の両様に切替えて使用できるパイプ搬送装置を提供する。
【解決手段】鋼管10を低速で搬送する冷却床60と、該冷却床の入側から出側まで鋼管を高速で搬送する高速搬送手段とからなるパイプ搬送装置であって、前記高速搬送手段は、鋼管をトング7で吊持して冷却床上方の高速路線45に沿って搬送する吊持コンベア(架構4、走行レール5、トング昇降・開閉・走行機構6等で構成される)からなることを特徴とするパイプ搬送装置。
(もっと読む)
長尺ウレタン仕分け装置及び長尺ウレタン仕分け方法
【課題】切れ目が入れられた長尺ウレタン材料を所定長さの長尺ウレタン製品に切り離してから、各長尺ウレタン製品を仕分けて収容するまでの工程において、作業者の工数を減らすことが可能な長尺ウレタン仕分け装置を提供する。
【解決手段】切断装置により切断箇所に切れ目が形成された長尺ウレタン材料Aを載置する載置台1と、この載置台1に載置されている長尺ウレタン材料Aの各ブレード部分を個別に吸着するための複数の吸着ユニット51と、この吸着ユニット51を長尺ウレタン材料の長手方向に沿って移動させるためのボールネジ機構58と、切り離されたブレードを収容するための収容装置60と、この収容装置60に形成された所定の収容箇所に複数の吸着ユニット51を移動させるための駆動部と、所定の収容箇所にブレードを収容できるように、ボールネジ機構58、駆動部、吸着ユニット51の動作を制御する制御部と、を備えている。
(もっと読む)
青果物選別装置
【課題】未選別のさくらんぼなど青果物を、人手に頼らずに、自動的、正確で、傷をつけることなく搬送部に供給できる、作業性を向上させた青果物選別装置を提供する。
【解決手段】未選別物を貯留する供給部3と、供給部3の未選別物を計測する測定部4と、測定部4の計測情報に基づいて未選別物を選別する選別部と、供給部3の未選別物を供給部3近傍から選別部まで搬送する搬送部2とを備え、供給部3の未選別物を吸着する供給部3の設定位置aと、吸着した未選別物を放出する搬送部2の設定位置bとの間を往復動する、吸着部を有する移送装置30を備える。吸着部は、供給部3の設定位置aと、搬送部2の設定位置bとで上下昇降かつ、上昇位置間で往復動し、未選別物を弾性的に支持するとともに、弾性変形可能であり、未選別物の載置部8aが、搬送部2の設定位置bに位置したことを検出する検出器を、搬送部2近傍に備える。
(もっと読む)
ワーク積載方法
【課題】スペースを広くすることなくロボットとパレット及びパレットを取り囲む光電管柱等との干渉を防止して装置の大型化及び装置コストの増大を防止する。
【解決手段】第1のパレット4から取り出したガラス3を第2のパレット5に移し替えるワーク取り出し装置7で、このワーク取り出し装置7を手首部分6に取り付けたハンドリングロボット2とこれに対向する第1のパレット4Jとの間で、且つ、該ハンドリングロボット2に対向する位置から前記第2のパレットの走行方向にオフセットさせた位置に前記第2のパレット5を配置して、前記オフセット側とは反対側からガラス3を第2のパレット5に積載させる。
(もっと読む)
部品移行装置
【課題】 部品供給通路から送出された最先の部品と後続の部品との位置関係を正常に設定して、円滑で正確な部品移行が行える部品移行装置を提供する。
【解決手段】 部品供給通路6から送出された部品1を保持して目的箇所へ移行する移行ヘッド部材28が設けられ、この移行ヘッド部材28の所定位置に部品1を停止させる基準面が形成され、移行ヘッド部材28の所定位置に向かって移動しつつある最先の部品1に対して加速力を付与するとともに、最先の部品1と後続の部品1との間に間隔L1を形成する加速手段が設けられている。これにより、最先の部品1が保持凹部29内の所定位置に定着してから、後続の部品1が移動してくる。
(もっと読む)
部品搬送機構
【課題】部品搬送パレットを複数用いる場合であっても、互いの干渉を避け部品の搬送を効率的に行うことが可能な部品搬送機構を提供する。
【解決手段】搬送対象となる部品13を搬送先へ搬送する第一の部品搬送パレット19と第二の部品搬送パレット20とを備え、第一の部品搬送パレット19と第二の部品搬送パレット20を互いに異なる移動軸上に配置すると共に、それら移動軸を移動軸に沿った任意の軸回りに回転可能とし、移動軸を180°回転させることにより、第一の部品搬送パレット19と第二の部品搬送パレット20の移動軸を互いに入替える構成とする。これにより、第一の部品搬送パレット19と第二の部品搬送パレット20を互いに干渉させること無く、各々最大限の速度で移動させることが可能となり、部品の搬送効率が向上する。
(もっと読む)
ワークの搬送方法及び搬送装置
【課題】封止済基板1を切断して形成された個々のパッケージ(ワーク)4を効率良く搬送し得て製品(ワーク4)の生産性を効率良く向上させる。
【解決手段】3種の直径の異なる同軸駆動プーリー11・12・13を回転駆動機構14にて所要の移動角度にて回転駆動させることにより、駆動プーリー11・12・13と従動プーリー16・17・18とに各別に平行掛けした走行ベルト19・20・21を所要の移動距離にて移動させることにより、往路走行側ベルトに固着したパッケージの移動係着部材24a・25a・26aと復路走行側ベルトに固着したパッケージの移動係着部材24b・25b・26bと移動させることにより、これらの移動係着部材の間に設けたパッケージの固定係着部材23を中心として当該移動係着部材の間隔を広げてパッケージ4を搬送する。
(もっと読む)
間隙設定装置を有する電子部品ハンドラ
電子部品ハンドラ用の間隙設定装置が提供される。電子部品ハンドラは、それに試験付属品が装着される線形軸受けを含む。試験付属品は、工具から離隔した第1の位置と、工具に近接する第2の位置との間で可動である。設定柱は、試験付属品から延出可能であり、試験付属品が第1の位置から第2の位置に移動する際、設定柱が、試験付属品および工具間の間隙を固定することを可能にする。  (もっと読む)
(もっと読む)
物品移載装置
【課題】横倒姿勢のタイヤのように上面に開口部を有しその下側に広い空間を有する様々なサイズの物品を傷や変形を生じさせることなく確実、安全に持ち上げて移載する。
【解決手段】昇降可能な基台と、基台の下側に垂下され内外方向に水平移動する複数のフックを備える。各フックの垂直部の外側面にタッチセンサを取り付ける。基台が下降して各フックが物品の空間内に入りきった状態にて水平光軸が物品に遮られる位置に投受光式センサを取り付ける。基台を下降させ投受光式センサが物品を検出した時点で下降を停止して各フックを外方向に移動させ、全てのタッチセンサが物品を検知した時に移動を停止させる。直後に各フックを僅かに内方向に後退させる。その状態で基台を上昇させ各フックの垂直部下端から略水平に延びる爪部にて物品の開口端部下側を支えて持ち上げる。
(もっと読む)
ワーク移送装置
【課題】ワーク載置数及びピッチが異なるキャリア間でワークを効率よく移し替えが行なえるワーク移送装置を提供する。
【解決手段】可動バッファ部5に載置される最大ワーク載置数は第2のキャリア3の載置数の倍数N(N≧2の整数)であり、第2のピックアップ7が可動バッファ部5からワークWをピックアップする前に第1のピックアップ6が第1のキャリア1から可動バッファ部5の空いた移載領域へワークWを必要な数だけ移載する。
(もっと読む)
棒状体の分離方法及び分離装置
【課題】 棒状体の束から棒状体を分離する方法および装置を提供する。
【解決手段】 分離装置(1)において、束(5)の最上部にある本体(6)の表面を検出手段(17)により測定し、その本体(6)を検出手段(17)の横方向に沿って第1保持手段(18)により把持し、垂直に持ち上げる。次に、第2保持手段(19)が第1保持手段(18)の横方向で本体(6)の下部に係止する。本体(6)を束(5)から持ち上げた状態で、第2保持手段(18)を本体(6)の他端部に移動させる。その後、本体(6)を2つの保持手段(18、19)によって置き場へ移動させる。
(もっと読む)
ワーク取り出し方法及びワーク取り出し装置
【課題】各パレット間でその高さ及び幅に寸法誤差があってもパレットからワーク取り出し装置でワークを取り出す作業を自動化する。
【解決手段】第1のパレット4の支柱8に形成されたカム溝に軸をスライド自在に係合させて略水平状態となる第1の状態とガラス3を取り出せる跳ね上げ状態となる第2の状態との間で開閉自在とされる仕切板9を複数有し、略水平状態となる第1の状態にある各仕切板9の上にガラス3を平置きして該仕切板9と該ガラス3とを交互に段積みしてなるパレット4からガラス3を取り出すワーク取り出し装置。このワーク取り出し装置7では、第1の状態にある仕切板9の下に入り込んでこの仕切板9を跳ね上げ、該仕切板9を前記ガラス3が取り出せる状態となる第2の状態とする跳ね上げ部材と、仕切板9が跳ね上げられることにより取り出し可能とされたガラス3を保持する吸着保持機構部と、を備える。
(もっと読む)
61 - 80 / 146
[ Back to top ]