
Fターム[3F072KD27]の内容
特殊移送 (6,503) | 物品保持移載手段(主に往復動)(その他) (1,147) | 往復動 (266) | 移動軌跡が直線 (146)
Fターム[3F072KD27]に分類される特許
21 - 40 / 146
ピッチ変換移載装置
【課題】複数個のワーク間のピッチを変換して移載する際に、簡単な機構でワークを移載することができるピッチ変換移載装置を提供する。
【解決手段】駆動部10により回転させられるシャフト20と、シャフト20に沿って配列されワーク101を個々に保持する複数の搬送ヘッド30と、シャフト20の回転に伴ってシャフト20から伝達される回転運動を、その軸方向と平行な方向の直進運動に変換して、搬送ヘッド30のうちの少なくとも基準となる搬送ヘッド30を除く他の搬送ヘッド30をシャフト20に沿って移動する方向変換機構40とが設けられ、他の搬送ヘッド30には、シャフト20の回転を所定の伝達比で方向変換機構40に伝達する伝達機構44が備えられ、他の搬送ヘッド30の伝達機構44は、その伝達比が、搬送ヘッド30の列の基準となる搬送ヘッド30から離れるに従って漸次大きくなるように設定されている。
(もっと読む)
物品移載装置

【解決手段】 物品1は4個の略三角形の面を備えた四面体形状を有し、その一端部分の形状と他端部分の形状とが異なっている。物品搬送手段4は上記物品の載置方向が搬送方向に対して一定の角度を向くように上記物品を搬送するようになっている。
移載手段6は、物品の一端部分の形状に適合して該一端部分を保持する第1保持手段52と、該第1保持手段に対して上記物品の載置方向と同じ方向に整列するとともに、該第1保持手段を挟むように設けた、物品の他端部分の形状に適合して該他端部分を保持する2つの第2保持手段53と、上記第1、第2保持手段を上記物品の載置方向に往復動させる切替手段54とを備えている。
【効果】 両端部の形状が異なる物品であってもこれを保持することができ、上記移載手段の構成ならびに制御を容易とすることができる。
(もっと読む)
移載装置及び移載方法並びに物品仕分け設備
【課題】従来よりも移載処理能力が向上した移載装置及び移載方法並びに物品仕分け設備を提供する。
【解決手段】
複数の物品が品種ごとに分けられてそれぞれ収容された複数の実ケースから、物品を移載して収容する仕分けケースを搬送するロボットプレースコンベヤ41と、物品を実ケースから仕分けケースに移載するロボット40と、を備えた移載装置69であって、実ケースを搬送する実ケース搬送コンベヤ25から供給された複数の実ケースを往復動させる往復動コンベヤ70を備え、往復動コンベヤ70を動作させて、移載対象となる物品をロボット40の動作範囲内に移動させる。
(もっと読む)
複数ワークの支持方法
【課題】ワーク移送用ハンガーへのワークの掛け作業及び処理完了後のワークの降し作業を、作業の省力化と効率向上、更にはワークの表面処理面の品質向上を目的として自動化するためのワークの自動掛け方法やその方法を使用した自動掛け装置に適用して有用な複数ワークの支持方法を提供すること。
【解決手段】セパレータによりガイドレール上に分離整列された複数ワークを、セパレータに保持させたまま、前記ガイドレール上方でサポート部に片持ち支持された串状支持体に向け移動させ、各ワークに設けられた掛止孔又は切欠に前記串状支持体を貫通させることにより、前記複数ワークを分離整列状態のままで前記レール上で前記串状支持体にまとめて支持させること。
(もっと読む)
搬送装置及び搬送方法
【課題】収容物の出し入れを行う面を下側とし、その面のフラップの封止を行うことなく、かつ、収容物の脱落を防止しつつ箱体を搬送する。
【解決手段】開閉自在な左右一対のフラップ201を底面に有する箱体200の搬送装置であって、前記箱体200を保持する保持ユニット10と、保持ユニット移動手段とを備え、前記保持ユニット10は、前記箱体200の上面又は側面において前記箱体200を保持し、前記箱体200を昇降させる昇降手段11と、前記一対のフラップ201のそれぞれに当接し前記フラップ201の開放を規制する一対の当接部材14と、前記一対の当接部材14が前記箱体の下方において互いに近接して前記フラップ201の開放を規制する開放規制位置と、前記一対の当接部材が前記箱体の下方において互いに離間して前記フラップの開放を許容する開放許容位置と、の間で前記一対の当接部材を移動させる当接部材開閉作動手段12とを備えた。
(もっと読む)
吊り下げ型移送装置及びきのこ栽培コンテナ用移送装置
【課題】圧縮空気の複数の配管をなくして装置を簡素化でき、きのこ栽培の工程では雑菌が侵入しにくい環境とすることができる吊り下げ型移送装置を提供すること。
【解決手段】移送物を保持する吊下保持部20を、複数の帯材21を巻き取り繰り出す帯材巻き装置部によって昇降させる吊り下げ型移送装置であって、吊下保持部20が、複数の帯材21によって吊下げられる実質的に方形の吊下基体23と、吊下基体23の対称位置にある一対の縁のそれぞれに中途部が回動可能に装着され、下部が内側へ回動した際に移送物に接触して保持するように設けられた回動保持部材30と、吊下基体23上に載置され、回動軸41及びリンク連結部42を有し、リンク連結部42を回動させる回動駆動部40と、一対の回動保持部材30、30の上部31とリンク連結部42とに連結された一対のリンク50、50を具備する。
(もっと読む)
姿勢制御装置
【課題】包装物を効率よく収納させる姿勢に制御させる姿勢制御装置を提供することである。
【解決手段】姿勢制御装置400においては、第1保持板410、第2保持板430を有する。第1保持板410、第2保持板430、第3保持板、一対の開閉装置440,441により略直立姿勢で集積された包装物800が集積方向の両側から保持される。また、包装物800をダンボール箱内に箱詰めする前に振動装置460により第1保持板410が矢印MV1の方向に往復移動され間隔が変動される。
(もっと読む)
物品保持装置
【課題】物品10を保持する複数のグリップ部材26の相互の間隔を、簡単な構造で拡縮する。
【解決手段】ロボットハンド4に取り付けられるベース部材20に、5本のエアシリンダ22を一列に固定する。一端の第1エアシリンダ22Aは、ベース部材に直角に、その次の第2エアシリンダ22Bから第5エアシリンダ22Eまでを順次傾斜角度が大きくなるように傾斜させて固定する。全てのエアシリンダを収縮させてグリップ部材を上昇させた位置から、第5エアシリンダ22Eを伸張させて第5グリップ部材26Eを下降させて物品を保持した後、上昇させ、第4ないし第1グリップ部材26D〜26Aも順次下降、物品の保持、上昇をさせる。その後、一斉にエアシリンダ22を伸張させてグリップ部材26を下降させ、物品10の相互の間隔を接近させた後バケット14内に挿入する。
(もっと読む)
移載装置およびケーサーシステム
【課題】ワークにストレスをかけることなく、かつ小型で高速にワークをケースに移載できる移載装置およびケーサーシステムを提供すること。
【解決手段】所定の梱包位置である第二位置P302を通過するように連続供給されるケースCにワークWを移載する移載装置であって、ワークWが供給されるマガジン部40と、マガジン部40に供給されたワークWを把持可能な把持体と、前記把持体に把持されたワークWをマガジン部40から空中へと離間させた後に、ワークWを把持した前記把持体を第二位置P302を通過中のケースCへ移送する移送機構30と、を備え、移送機構30は、前記把持体をケースCの移動に追従させてワークWをケースCに案内する追従手段20を有する。
(もっと読む)
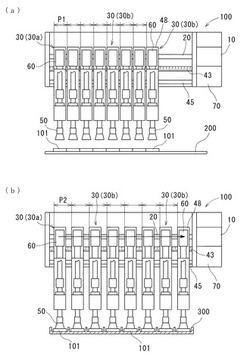
レンズ搬送装置およびレンズ加工システム
【課題】レンズ搬送を高速で行うことのできるレンズ搬送装置を提案すること。
【解決手段】レンズ搬送装置20は、第1位置P1において上方から未加工レンズ2Aを受け取り、当該未加工レンズ2Aを第2位置P2に搬送して上方に位置するレンズホルダー11に引き渡すために用いる供給側レンズ搬送容器25と、第2位置P2において上方に位置するレンズホルダー11から加工済みレンズ2Bを受け取り、当該加工済みレンズ2Bを第3位置P3に搬送して上方に排出するために用いる排出側レンズ搬送容器26とを備えている。これらの容器25、26の退避位置P0(25)、P0(26)は第1〜第3位P1〜P3の間にあり、これらの容器25、26は二軸送り機構24によって一体として直線送りされて各位置に位置決めされる。少ない送り動作回数で、直線状の短い経路を移動させればよいので、レンズ搬送動作を短時間で行うことができる。
(もっと読む)
棒材のラック挿入方法及びそのシステム
【課題】小ラックに形成されている多数の支持孔に棒材を挿入する棒材のラック挿入工程の短縮化を図る。
【解決手段】棒材のラック挿入システムは、大ラック押出台上の大ラックから、棒材押込機14の押込みロッド15によって押出された棒材26が、小ラック挿入台上の小ラック24の支持孔38に押込まれる際に、短くて奥まで押込まれないときでも、大ラック押出台と小ラック挿入台の間のピンチローラ装置18により、押込みロッド15を更に駆動して、棒材26の先端部27が小ラック24の端部24Aから突出するように押込み、その先端部27を、頭揃え装置20の棒材ストッパ20Aによって一定量押し込み、全ての棒材26の先端を揃える頭揃えを行なう。
(もっと読む)
システム、把持ヘッド、および、製品を移すための方法
本発明は、製品を移すためのシステムに関し、当該システムは、製品(5)を搬送方向に搬送するためのコンベア(3)を有し、かつ、該製品を該コンベアから他の位置へと移すための可動の把持ヘッド(9)を持った把持装置(7)を有し、前記把持ヘッドは、ベース(32)を有し、少なくとも1つの把持フィンガー(36)を有し、該把持フィンガーは、製品の第1の側を保持するための把持ポジションと、前記少なくとも1つの把持フィンガーを製品が通過方向に通過できる開ポジションとの間での動作のために、該ベースに可動に取り付けられており、前記少なくとも1つの把持フィンガーは、把持ポジションから開ポジションへと移動する時に、該把持フィンガーが最初に前記通過方向に該製品から遠ざかる方へ移動するように構成されている。本願発明は、さらに、把持ヘッドに関し、かつ、その把持ヘッドを用いて製品を他の位置に移す方法に関する。 (もっと読む)
ICオートハンドラ
【課題】 ソケットに付着する汚れを分散させるとともに、ソケットの交換を容易にする。
【解決手段】 ICオートハンドラは、2以上のソケットを保持することが可能で、保持したソケットの1つを検査装置の測定部に電気的に接触させるコンタクトプレスと、2以上のソケットを収容可能なソケットバッファ部と、コンタクトプレスとソケットバッファ部との間でソケットを搬送するソケット搬送機構とを備える。
(もっと読む)
包装機への袋供給方法及び装置
【課題】横型製袋機と包装機が併設されかつ両者が連動する製袋包装機において、種々のタイプの横型製袋機と包装機の組み合わせ及び設置形態を可能とする。
【解決手段】横型製袋機から送り出された袋を位置決めする位置決めコンベア3、袋を包装機のコンベアマガジン式給袋装置に順次供給する供給コンベア39、及び位置決めコンベア3と供給コンベア39の間に配置された第1〜第3移送手段からなる。第1移送手段4,5は、位置決めコンベア3上の袋を吸着して持ち上げ、開口部を下向きとした垂直姿勢に変更する。第2移送手段21,22は第1移送手段4,5に保持された袋を挟持部材27で挟持して受け取り、所定位置に水平移送すると同時に袋を回転させて袋面を前記供給コンベアの送り方向に向ける。第3移送手段35は第2移送手段21,22に保持された袋を吸着して受け取り、水平姿勢に変更し開口部を送り方向に向けて前記供給コンベア39上に置く。
(もっと読む)
平板状部材の搬送装置
【課題】変形を抑制しつつ安定して平板状部材を搬送することのできる搬送装置を提供する。
【解決手段】ガラス基板90の搬送装置は、ガラス基板90を吊下げるようにその上部を把持するチャック装置50と、直線の搬送経路に沿って延びるように形成され、チャック装置50によって吊下げるように把持されるガラス基板90の下部を両面から非接触で支持する流体支持装置40a,40bと、ガラス基板90の下部が流体支持装置40a,40bにより支持される状態で維持されるように搬送経路に沿ってチャック装置50を移動させる電動スライダ30とを備える。
(もっと読む)
物品保持装置
【課題】物品に位置ズレが生じていても、物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置13は、物品2の側面部3,4,5に対して進退可能でそれぞれが異なる側面部3,4,5に引っ掛かるフック体21,41,51を備える。各フック体21,41,51には、対応する側面部3,4,5を検知する検知手段42,52を取り付ける。対応するフック体21,41,51を進退させる駆動手段23を各フック体21,41,51に対応して設ける。物品保持装置13は、検知手段42,52の検知に基づいて駆動手段23を制御して各フック体21,41,51の進出動作を個別に停止させる制御手段61を備える。
(もっと読む)
バッグインボックス搬入装置
【課題】液体を充填したフレキシブルな内袋を、外箱に安定した姿勢で一定位置に収納可能としたバッグインボックス搬入装置を提供する。
【解決手段】液体を充填したフレキシブルな内袋を、外箱に収納するバッグインボックス搬入装置において、内袋を吸着する吸着手段と、吸着された内袋を外箱の上方の決まった位置まで移動する搬送手段と、内袋の吸着を解除する吸着解除手段とを備えたことを特徴とするバッグインボックス搬入装置。
(もっと読む)
ワーク搬送装置およびその搬送制御方法
【課題】装置自体がコンパクトで場所を取らず、構成部品を減らして、設備コストを抑制可能なワーク搬送装置を提供する。
【解決手段】加工前ワークW1を搬送して加工ステーションに投入すると共に、加工ステーションから加工済ワークW2を取出して送り出すワーク搬送装置20である。
ワーク搬送装置20は、基体21に、加工前ワークW1を投入するべく搬送する第1の搬送機構22と、加工済ワークW2を取出し、搬送する第2の搬送機構23とを備える。
これら第1、第2搬送機構22、23は、基体21に固設した共用雄ねじ24に、ねじ対偶で、それぞれ制御移動可能に構成した。
(もっと読む)
パッケージング装置および物品の包装方法
物品を包装するためのシステムであって、当該システムは、アイテム(7)の第1の流れを形成するようアイテムを輸送するための第1のコンベア(6)と、アイテムの第2の流れを形成するようにアイテムを輸送するための第2のコンベア(23)と、二つの流れの一つ以上からのアイテムと係合すると共に、この二つの流れの一方から、この流れと実質的に交差する方向に、そのように係合させられたアイテムを移送することができ、かつ、これら二つの流れの少なくとも一方が連続的に動いている間に、この二つの流れの他方における隣接するポイントに、これらのアイテムを配置するための第1のツール(16)とを具備してなる。 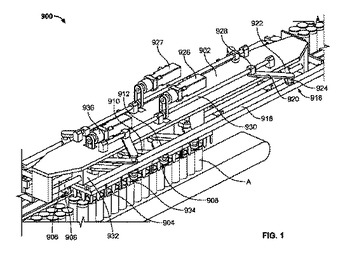 (もっと読む)
(もっと読む)
タバコ産業で使用される、ロッド状エレメントで充填された区画トレイの内容物の取り出しを行うためのデバイス
【課題】ロッド状エレメント(25)で充填した区画トレイ(2)の内容物の取り出しを行うためのデバイスであって、一つの平面内に平行に配置された、充填済トレイ(2)用の入口コンベア(1)及び空のトレイ(2’)用の出口コンベア(3)を有し、更に、支持プレート(6)が設けられた、トレイ(2)用の転向ユニット(4)と、トレイ(2’)用の転向ユニット(12)を有する、デバイスを提供する。
【解決手段】デバイスには、トレイ(2、2’)用の直線的輸送機(14)が設けられており、この直線的輸送機は、コンベア(1、3)の平面に対して垂直な平面に配置されている。直線的輸送機には、トレイ(2)用のグリップユニット(16)及びトレイ(2’)用のグリップユニット(17)が設けられている。輸送機(14)の下には、グリップユニット(16)の作動ゾーン内に、取出コンベア(24)が配置されている。この取出コンベア(24)の端部は、不動のスロート(27)の入口のところに配置されている。トレイ(2)用の転向ユニット(4)には、エレメント(5)で形成された支持プレート(6)が設けられている。これらのエレメントの数は、トレイ(2)の区画(8)の数と対応し、エレメント(5)間の距離は、トレイ(2)の内壁(9)の厚さと対応する。直線的輸送機(14)はガイド(15)を含み、このガイドに、二つのグリッパ(22、23)を持つキャリッジ(20、21)の形態の二つの別々のグリップユニット(16、17)が配置されている。スロート(27)の壁は移動可能であり、整合ユニット(29)を形成し、スロート(27)の下には移動可能支持体(30)が配置されている。取出コンベア(24)とアウトフィードコンベア(28)との間のスロート(27)の垂直壁(26)には、揺動バルブプレート(32)が設けられている。更に、デバイスには、トレイ(2’)の区画(8)のクリーニングを行うための機構(33)が設けられている。この機構(33)は、回転するように組み立てられたブラシ(34)を含む。これらのブラシは、出口コンベア(3)の始端ゾーンに、グリップユニット(17)の下に配置されている。
(もっと読む)
21 - 40 / 146
[ Back to top ]