
Fターム[3F072KD28]の内容
特殊移送 (6,503) | 物品保持移載手段(主に往復動)(その他) (1,147) | 往復動 (266) | 移動軌跡が曲線 (67)
Fターム[3F072KD28]に分類される特許
1 - 20 / 67
ワーク移載装置
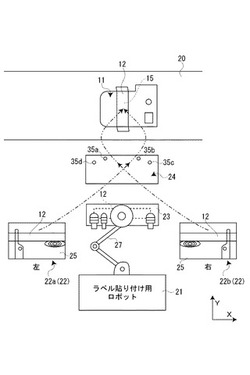
【課題】給材位置からアライメント位置に移載されるワークを、一連の移載動作に影響を与えることなくアライメントすることができるワーク移載装置を提供する。
【解決手段】ファイバーセンサー35a〜35dを有するラベルアライメント部24を設け、ロボットアーム27の先端の吸着ユニット23をラベルアライメント部24上で斜め方向にスキャンさせ、検出信号が取得されたときの座標を記憶する。ファイバーセンサー35a〜35dのうち、3点のファイバーセンサーの検出信号が取得されたら、この3点の座標に基づいて、ズレ量を求め、貼り付け座標の補正値を算出し、この補正値に基づいて、貼り付け座標を補正しながら、ラベル12をテープカートリッジ11に貼着する。
(もっと読む)
パン型造粒機用の大塊処理装置

【課題】パン型造粒機において、その運転中に自動的に大塊を除去することが可能な塊処理装置を提供する。
【解決手段】回転して粉体を造粒するパン23が備えられたパン型造粒機21用の大塊処理装置1であって、大塊を掬い上げる掬上げ治具3と、先端に掬上げ治具3が着脱自在に取り付けられ、パン23の回転方向に沿って掬上げ治具3をパン23に挿入させて大塊を掬い上げさせるロボットアーム2と、を具備してなることを特徴とするパン型造粒機用の大塊処理装置1を採用する。
(もっと読む)
表面処理における基板移送装置及び方法
【課題】表面処理用の移送装置にて被処理基板の両端部をチャックして、前記被処理基板を処理部に入れたり処理部から出したりする際、被処理基板が撓んだ状態になるのを防止する。
【解決手段】基板移送装置3のフレーム22の第1方向に離間して設けられた一対のチャック部30,30にて、被処理基板9の第1方向の両端部をそれぞれチャックする。このチャック状態で、張り付与手段27によって、少なくとも一方のチャック部30を他方のチャック部とは反対側に付勢する。そのうえでフレーム22を処理部1に出し入れする。
(もっと読む)
把持装置及びワーク搬送装置
【課題】重ねられ通気性を有する板状ワークであっても確実に把持し得る把持装置及びワーク搬送装置の提供。
【解決手段】板状ワークの一方の面側に対向可能な対向面11及び該対向面11に対し該対向面11の面直方向に突出すると共に該対向面11に沿う所定方向に近接離間可能な一対の爪部12を備える把持部10と、板状ワークの一方の面側に対向面11が当接したか否かを検出する第1検出部20と、を有し、第1検出部20は、板状ワークの一方の面側に当接可能な大きさの板面21aを備えて、該板面21aが、対向面11と同一面上に位置する第1の位置と、対向面11から面直方向に突出した第2の位置と、の間において移動可能な板状部材21を有する把持装置1を採用する。
(もっと読む)
梱包装置および商品の梱包方法
【課題】初期製品容器内に製品を収納する処理装置の排出部に連結されることが可能な梱包装置を提供する。
【解決手段】梱包装置(10)は、各々がカートン内に製品(A)を梱包することが可能な2つ以上の梱包サブシステムを具備し、梱包サブシステムは梱包される製品(11)の共通の出所を共有し、少なくとも1つの移送機構(22)が、前記共通の出所から2つ以上の前記梱包サブシステムのいずれかに製品(A)を移送するために設けられている。
(もっと読む)
選果システム
【課題】移送装置による載置台からトレイへの青果物の移送能率の低下を極力抑制するとともに、載置台からトレイへ青果物を移送する際に移送装置の吸着部に吸着された青果物が当該吸着部から落下することを抑制することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を吸着部66で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイに詰める、選果システム1であって、移送装置60は、青果物6を吸着した状態で吸着部66が上方へ移動するときの平均速度、または、青果物6を吸着した状態で吸着部66が下方へ移動するときの平均速度が、青果物6を吸着した状態で吸着部66が水平方向へ移動するときの平均速度に比べて遅い速度となるように構成される。
(もっと読む)
ドラム缶のハンドリング装置
【課題】倉庫などに収納するドラム缶の数を多くすることができ、衝撃なくドラム缶を壁面に近接して設置できると共に、壁面に近接して設置されたドラム缶を容易に取り出すことができるようにする。
【解決手段】ドラム缶10を挟持及び解放する一対のクランプ部2と、各クランプ部2を互いに近接及び離反するスライド部とを備え、クランプ部2は、ドラム缶10の長手方向の両端面部10cを挟持し、ドラム缶の両端面部10cに当接する自由回転可能な複数のフリーベアリング3を備え、クランプ部2の周囲が、ドラム缶の両端面部10cから突出した鍔部10aに係止して、ドラム缶10を持ち上げ可能とする。
(もっと読む)
板状部材反転システム及びその反転移送方法
【課題】 高速で板状部材を反転させることができると共に上面を傷つけることなく板状部材を反転することができる板状部材反転システムを提供する。
【解決手段】 複数の板状部材を順次反転して移送する板状部材反転システムは、第2デルタロボット60と、反転装置61と、第2移送装置第2移送装置62とを備えている。第2デルタロボット60は、板状部材12を順次保持して反転装置61に移載するようになっている。反転装置61は、第2デルタロボット60により前記板状部材が水平姿勢で移載され、移載された前記板状部材12をその上面を開放した状態で吸着保持して板状部材12の上下面を反転させるようになっている。また、第2移送装置62は、反転装置61から反転された板状部材12を受取り、その板状部材12を反転された状態で且つ水平状態で移送するようになっている。
(もっと読む)
電気抵抗溶接機の部品供給装置
【課題】複数種類の部品供給装置を一対の電極に対して装着することを最小のスペースで実現する
【解決手段】電極軸線O−O上に配置された可動電極7と固定電極8が溶接装置の支柱2の前面3から離隔した箇所に配置され、複数種類の部品を可動電極7または固定電極8に供給する複数の部品供給装置A、B、CおよびDが、支柱2または突出部材4、5に取り付けた支持部材23、44、56、71を介して支柱2の前面3を含む仮想平面から離隔した空間に配置してある。こうすることにより、支柱2の横側のスペースを有効に活用し、各供給装置の配置スペースも小さくすることができる。
(もっと読む)
物品供給装置
【課題】幅の広い平面(第1の面)を上下にして搬送されてきた物品を、90度回転させて立てた状態で箱詰めするために供給する装置を提供する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
(もっと読む)
容器処理装置
【解決手段】 容器処理装置1は、各バケット12内に角型の容器2を収容して搬送する第1搬送コンベヤ3と、第1搬送コンベヤ3によって搬送される容器2を撮影するカメラ4と、制御手段7によって作動を制御されて、バケット12内の容器2を吸着して取り出すロボットハンド6Aとを備えている。
カメラ4が撮影した容器2の画像が制御手段7へ伝達されると、制御手段7は、容器2の画像上の中心位置を求め、そこからバケット12の中心12cへ所定量ずらした位置を上記ロボットハンド6Aによる容器2の吸着位置として決定する。ロボットハンド6Aは、バケット12内で傾斜している容器2の側面2Bの上記吸着位置を吸着してバケット12内から取り出す。
【効果】 角型の容器2であってもロボットハンド6Aによって確実に吸着して取り出すことができる。
(もっと読む)
食品搬送システム
【課題】搬送用ロボットを使用して食製品を搬送する搬送システムを提供する。
【解決手段】食製品製造装置3によって製造された食製品5を搬送する食製品搬送手段7と、前記食製品5をを搬送する別個の搬送手段13と、前記食製品搬送手段7から前記別個の搬送手段13へ食製品を搬送する搬送用のロボット15を備えた食品搬送システムであって、前記ロボット15は、前記食製品5を保持する保持面77を備えた複数の保持部材63A〜63Fを開閉自在に備え、かつ前記各保持部材63A〜63Fの前記保持面77を清掃するための清掃手段を、前記ロボットのロボットハンド19に、又は前記ロボットの周囲の適宜位置に備えている。ロボットハンド19に装着して補助作業を行うための複数の補助作業具103を、前記ロボットハンド19に着脱交換自在に備え、前記ロボットハンド19に対して着脱交換するための複数の補助作業具103A〜103Cを備えた補助作業具交換部を備えている。
(もっと読む)
昇降装置
【課題】搬送通路との干渉を避け、且つワークを安定して昇降させる。
【解決手段】ワークを搬送する搬送通路を挟んで配置される複数の垂直軸と、各垂直軸に個別に対応して設けられ、ワークを支持可能な複数のアームと、各アームに個別に対応して設けられ、対応するアームを垂直軸に沿って昇降させる複数の昇降アクチュエータと、複数の昇降アクチュエータを駆動制御する昇降制御部と、各アームに個別に設けられ、対応するアームを水平面内で揺動させる複数の揺動アクチュエータと、前記複数の揺動アクチュエータを駆動制御する揺動制御部と、を備え、昇降制御部より与えられる指令に基づいて各昇降アクチュエータが駆動され、揺動制御部より与えられる指令に基づいて各揺動アクチュエータが駆動される昇降装置において、アームが、垂直軸に連結されて水平面内を揺動可能な平行リンク部と、平行リンク部に連結されて水平面内を揺動可能な先端部とを有する。
(もっと読む)
転送装置
【課題】本発明の課題は、柔軟性接着フィルムを転送する装置及び方法を提供することである。
【解決手段】本発明に係る装置は、ヘッド201を含み、第1の基板203から第2の基板204へ柔軟性シート素材202を転送する。前記ヘッド201は、前記第1の基板203及び前記第2の基板204に対して相対的に回転及び移動をすることができ、円筒状の湾曲部205を含んでいる。前記円筒状の湾曲205部は、外面207にわたって開口部206が設けられている。前記開口部206は、前記外面207に接触するシート素材202に空気圧を印加する。前記ヘッド201は、回転と移動の組み合わせによって、前記第1の基板203から前記第2の基板204へ前記シート素材202を転送する。
(もっと読む)
可搬式レール反転装置
【課題】レールを効率的に反転可能で、移動が容易な可搬式レール反転装置を提供する。
【解決手段】レールのウェブにその端部から二股状のフォーク金具13を装着し、レールを回転するレール反転装置10であって、レールに直交する方向に移動可能な台車14と、台車14の進行方向に沿って設けられたガイドレール15、16と、ガイドレール15、16に沿って移動可能な移動架台17と、移動架台17に昇降手段18を介して上下動可能に設けられたベース架台19と、ベース架台19に水平軸を介して回動可能に取り付けられた傾動架台22と、傾動架台22に軸受を介して取り付けられ、両端にフォーク金具13が設けられた、ガイドレール15、16に直交する軸心方向にスライド可能な反転スライド軸24と、反転スライド軸24を回転させる回転駆動手段25と、傾動架台22の回動角度を制限する傾動角制限手段とを有している。
(もっと読む)
ワーク移載装置、ケーサーシステム、およびワーク移載方法
【課題】ワークにストレスをかけることなく、かつ高速で効率よくワークをケースに移載できるワーク移載装置、ケーサーシステム、およびワーク移載方法を提供すること。
【解決手段】フレームに組みつけられたワーク移載装置300であって、チャックユニット10と、チャックユニット10に接続され、第一位置P301におけるワークWの配置に対応する第一形態から第二位置P302におけるワークWの配置に対応する第二形態へとワークWの配列を変換する配列変換部20と、配列変換部20に取り付けられ、第一形態から第二形態へワークWの配列を変換するための駆動力を発する動力源と、この動力源に接続された歯車部材と、フレームに少なくとも一部が固定され、第一位置から第二位置への配列変換部20の移動軌跡を規定し、歯車部材に噛み合う歯が形成された歯付き部材と、を備える。
(もっと読む)
移送装置
パリソン3およびボトル2等の物体を移送する装置は、所定の軸Xを中心に回転する回転台10と、物体2,3用のピックアップエレメント14と、回転台10に接続されたピックアップエレメント14用のサポートアーム16と、サポートアーム16およびピックアップエレメント14を案内するカム12と、を備え、ピックアップエレメント14は、回転台10に対する少なくとも3つの自由度を有し、カム12は、所定の経路に沿ってピックアップエレメント14を移動させるように、所定の数のトラック22,23,24を有し、カム12は、固定部分25と、該固定部分に接続される少なくとも1つの取り外し可能部分26と、を有し、取り外し可能部分26は、所定の形状を有し、当該取り外し可能部分26の形状と異なる形状を有する他の取り外し可能部分と交換可能である。  (もっと読む)
(もっと読む)
ICオートハンドラ
【課題】 ソケットに付着する汚れを分散させるとともに、ソケットの交換を容易にする。
【解決手段】 ICオートハンドラは、2以上のソケットを保持することが可能で、保持したソケットの1つを検査装置の測定部に電気的に接触させるコンタクトプレスと、2以上のソケットを収容可能なソケットバッファ部と、コンタクトプレスとソケットバッファ部との間でソケットを搬送するソケット搬送機構とを備える。
(もっと読む)
物体の移し替え装置
【課題】 直方体状の物体を、第1移送手段の第1容器から第2移送手段の第2容器に反転して適確に移し替えることが可能な物体の移し替え装置を提供する。
【解決手段】第1・第2移送手段2・4の間に、これらと同一方向へ指向するとともに回転中心線を同一にしかつ垂直面内で正逆回転可能に配設された2本の第1・第2回転軸9・10と、第1回転軸を正逆回転させる第1回転軸駆動手段11と、第2回転軸を正逆回転させる第2回転軸駆動手段12と、第1回転軸にこれと直交する方向へ延びて固着されて第1移送手段と第2移送手段の上方位置との間を旋回移動可能な第1回動部材13と、第2回転軸にこれと直交する方向へ延びて固着されかつ物体を第1・第2容器を介して第1回動部材とで挟持して第1移送手段から第2移送手段に旋回移動可能な第2回動部材14と、第1回動部材に装着されて第1容器をクランプする第1クランプ手段21と、第2回動部材に装着されて第2容器をクランプする第2クランプ手段28と、を備えたことを特徴とする。
(もっと読む)
プリント基板供給装置
【課題】 プリント基板供給装置の装置本体への基板のセット作業や搬送作業を極めて簡単かつ敏速に行えるようにする。
【解決手段】 同一の寸法、形状を有する多数の基板を互いに重ね合わせてなる基板束4を縦置きすることができる基板セット部Sを装置本体内2に設けるとともに、複数個の無接触吸着パッド8を突設したL字形作動アーム7を所定の角範囲に亘って往復回動可能に設け、該作動アームと共に往復回動するそれらのパッドで基板束から基板を1枚づつ吸着分離して搬出面上へ搬送するようにする。
(もっと読む)
1 - 20 / 67
[ Back to top ]