
Fターム[3F204DA01]の内容
クレーンの細部(制御、安全) (2,955) | 被搬送物と荷役場所 (198) | 被搬送物 (107)
Fターム[3F204DA01]の下位に属するFターム
Fターム[3F204DA01]に分類される特許
1 - 16 / 16
架空配管の撤去工法および撤去作業用ゴンドラ
【課題】架空のガーター上に設置された架空配管の撤去工法において、高所足場を仮設するための費用を縮減することができ、且つ高所足場の仮設に伴う危険を回避するための負担を軽減することができる架空配管の撤去工法およびその撤去工法において用いられる撤去作業用ゴンドラを提供する。
【解決手段】架空のガーター上に設置された架空配管の撤去工法において、揚重機によって揚重された吊り梁に吊り下げ固定された少なくとも2台の有人式バケット型ゴンドラを利用して、前記架空配管を撤去する撤去工程を含むことを特徴とするものである。
(もっと読む)
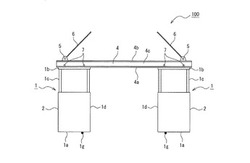
移載システム

【課題】横移載時にも被搬送物を載置台の所定位置に移載する。
【解決手段】移載システム(100)は、天井に敷設された軌道(1)に沿って走行しつつ被搬送物(3)を搬送する搬送車(2)と、軌道より下方に設けられる載置台(4)との間で被搬送物が横移載方式で移載可能である。移載システムは、(i)搬送車に把持される被搬送物を載置台の所定位置に載置する載置動作を行う際の被搬送物の移載位置を表す載置位置情報、及び(ii)載置台上の被搬送物を搬送車が把持する把持動作を行う際の被搬送物の移載位置を表す把持位置情報を記憶する記憶手段(101)と、載置動作を行う場合、載置位置情報の移載位置で移載が行われるように、他方、把持動作を行う場合、把持位置情報の移載位置で移載が行われるように搬送車を制御する制御手段(102)とを備える。
(もっと読む)
倉庫内で物体を移動するためのシステム
【課題】閉じられた空間に位置される物体を移動するためのシステムを提供する。
【解決手段】希望する位置に前記物体を把握しそして方向付けるために適用される少なくとも1つの遠隔操縦機3および実質的に水平である少なくとも2つの異なる方向に前記閉じられた空間で前記遠隔操縦機を移動するために適用される少なくとも1つの頭上走行クレーン機構2を含む。操作者によって制御される電子処理ユニットは頭上走行クレーン機構および遠隔操縦機の移動を電子的にそして自動的に決定することが可能である。
(もっと読む)
鍛造クレーン及び鍛造クレーンの制御方法
【課題】インバータ制御によって電動機を回転駆動することで、装置全体の軽量化を図りつつ、急激に大きな荷重が作用した場合にも過負荷とならないように速やかに巻き下げ動作を実施することが可能な鍛造クレーン及び鍛造クレーンの制御方法を提供する。
【解決手段】鍛造クレーンは、ワイヤが巻回されたドラムと、ドラムを回転駆動する電動機35と、電動機35に出力する交流電流を制御するインバータ36と、ドラムの回転を制動する制動部4と、鍛造モード及び通常モードの2種類のモードに設定可能なモード切替部7と、インバータ36を制御する主制御部5とを備え、主制御部5が、モード切替部7で鍛造モードに設定された場合に、制動部4によりドラムの回転を制動させるとともに、インバータ36に予備励磁指令を出力して、予め設定された予備電圧をインバータ36によって電動機35に印加させる。
(もっと読む)
天井クレーンによる金型搬送システム
【課題】クレーンオペレータが直接目視することができない状況下にあっても、安全な天井クレーン作業を行うとともに、保全員の手持ち、運搬及び動作の無駄を無くして合理的な生産システムを構築するようにした天井クレーンによる金型搬送システムを提供すること。
【解決手段】プレス機11側の情報と天井クレーン側Cの情報とを地上側に配設した第1のデータ伝送装置1と天井クレーン側Cに配設した第1のデータ伝送装置1にて情報を相互に伝達するようにするとともに、天井クレーン側Cの第1のデータ伝送装置1と天井クレーン側Cに配設した検出手段にて天井クレーンの走行、横行及び巻上位置を検出して天井クレーンの位置情報を管理する制御装置をデータ電送装置で接続し、かつ第1のデータ伝送装置1間の情報と個別的にクレーンオペレータ側と天井クレーン側との情報を無線通信にて行うように構成する。
(もっと読む)
デッキクレーン
【課題】ジブ俯仰用ウィンチやフック巻上用ウィンチからの戻り圧油エネルギーを回収し、回収されたエネルギーを再利用して、省エネルギー化を図ること。
【解決手段】積荷を上昇および下降させるワイヤ11が巻回されたウィンチ28と、ワイヤ11を巻上げる際には、ウィンチ28を回転させる油圧モータとして作動し、ワイヤ11を巻下げる際には、自重によって降下する積荷が引き出すワイヤ11によって回転させられるウィンチ28の回転力を駆動源として回転するポンプとして作動する油圧ポンプ・モータ27と、ワイヤ11を巻上げる際に、油圧ポンプ・モータ27に昇圧されたオイルを供給する油圧ポンプ22と、ワイヤ11を巻下げる際に油圧ポンプ・モータ27にて昇圧されたオイルを一時的に貯留しておくアキュムレータ30とを備え、ワイヤ11を巻上げる際に、アキュムレータ30に貯留されたオイルが、油圧ポンプ22に供給されるように構成されている。
(もっと読む)
フローティングクレーンによる共吊り運転制御方法及び装置
【課題】フローティングクレーンに備えられているシーケンス制御装置を用いて簡略な装置構成によって共吊り制御を行えるようにする。
【解決手段】一方のフローティングクレーン1に備えられている一方のシーケンス制御装置Sと、他方のフローティングクレーン2に備えられている他方のシーケンス制御装置Sとを通信ケーブル16により接続して、一方のシーケンス制御装置Sを主PLC17とすると共に、他方のシーケンス制御装置Sを副PLC18とし、主PLC17に、重量構造物の巻上・巻下運転指令を発する運転操作ボード23と、夫々のフローティングクレーン1,2の運転状況を表示するディスプレイ13’と、演算装置24とを設け、主PLC17に設けた運転操作ボード23を一人の操作員がディスプレイ13’の表示を見ながら操作することで2隻のフローティングクレーン1,2による重量構造物の共吊りを可能にする。
(もっと読む)
天井クレーンによる搬送方法およびこの搬送方法を利用した天井クレーンシステム
【課題】フルオートシステムとパワーアシストをシームレスで併用し,両者の欠点を補うことで,生産性の向上と作業者の負担低減する天井クレーンによる搬送方法およびこの搬送方法を利用した天井クレーンシステムを提供する。
【解決手段】天井クレーンをパワーアシストとして用いて作業者が、望む方向へ望む速度で半自動的に搬送する方法であって、コンピュータを利用した制御装置によって自動生成された速度指令より移動する天井クレーンを用いるとともに、天井クレーンのロープ巻揚げドラムから垂れ下がるロープ7の下端に掛止されて水平移動される荷物10に作業者の操作力を加えて、天井クレーンによるパワーアシストを得ながら作業者が、望む方向へ望む速度で当該荷物を、搬送開始位置から目標搬送位置の真上までの3次元空間における搬送経路に沿って半自動的に搬送することを特徴とする。
(もっと読む)
天井走行搬送装置
【課題】気流の影響によらず、容易に搬送物を載置位置に載置する。
【解決手段】走行機構17がレール11に沿ってポート43上に移動する。昇降機構13が懸垂ベルト14を繰り出すことによって、FOUP21が降下する。距離センサ31が降下距離を測定し、FOUP21が位置決めピン23近傍まで降下したと判断した場合、風向風速センサ25が水平方向に関する風向及び流速を測定し、重量センサ30がFOUP21の重量を測定する。次に、ズレ量記憶部が参照されて位置ズレ量が推定され、この位置ズレ量に基づいて、水平移動機構12によって昇降機構13が水平方向に移動する。そして、再度昇降機構13が懸垂ベルト14を繰り出すことによって、FOUP21は降下して、FOUP21の位置決めピン23と位置決め穴とが重ね合う。
(もっと読む)
天井走行搬送装置
【課題】搬送台車の走行方向前方にある障害物の検知、及び搬送台車の下方にある障害物の検知を低コストで実現する。
【解決手段】搬送台車20に、搬送台車20の走行方向前方に位置する前方監視領域及び下方に位置する下方監視領域を含む領域をスキャニングすることができるセンサ30を設ける。そして、選択部は、搬送台車20が走行している際には、センサ30によるスキャニング領域のうち前方監視領域を選択し、搬送台車20が搬送物であるFOUP80の回収作業又は載置作業を行っている際には、下方監視領域を選択する。監視部は、選択部によって選択された監視領域内の障害物を監視する。
(もっと読む)
クレーンシステム
【課題】本発明の目的は、クレーンを用いた機器メンテナンス作業において、作業の安全確保、作業時間の短縮及び作業精度向上を図りつつ、自動化することができるクレーンシステムを提供することにある。
【解決手段】クレーンシステムは、フック9を移動するクレーン20と、クレーン20の動作を制御するクレーン動作制御装置18と、クレーン動作制御装置に操作指示を送るクレーン操作装置10とを有する。RFIDリーダ手段11は、メンテナンス対象機器1と、メンテナンス対象機器の構成部品3と、吊りワイヤ5と、枕木8と、位置が変化する移動体14にそれぞれ取り付けられたRFID2,4,6,8,15からメンテナンスに関する情報を読み取り、表示手段13に表示する。
(もっと読む)
天井走行クレーンランウェイの補強方法
【課題】吊り能力を増大させるために天井走行クレーンランウェイを補強する際に、工期の短縮、低コストを図る。
【解決手段】天井走行クレーンランウェイを吊り能力の増大により補強する方法において、クラブトロリー10の走行方向及び横行方向の移動範囲ER,ER1,ER2を制限する移動制限手段を設けるとともに、この移動制限手段により横行方向の移動が制限されてクラブトロリーが近接せず、支持荷重が増大しないランウェイガーダー2a,2bに対しては補強を行なわず、移動制限手段による横行方向の移動が制限されず、クラブトロリーが近接することで支持荷重が増大するランウェイガーダーに対して補強を行なうようにした。
(もっと読む)
大型構造物の運搬制御システム
【課題】大型構造物を複数の起重機船のジブで吊上げて運搬する際に、大型構造物に生じる負荷を軽減しつつ、安全かつ精度よく容易に運搬可能とする大型構造物の運搬制御システムを提供する。
【解決手段】ゴライアスクレーン1に運搬物用GPS受信機5e、5f、両起重機船2a、2bにそれぞれ起重機船用GPS受信機5a〜5b、5c〜5dを設置し、運搬中のこれら1、2a、2bの絶対位置および相対位置をリアルタイムで把握し、情報処理装置8に予め入力された運搬経路を示す位置データと、各GPS受信機5a〜5fから受信した位置データとの比較結果をリアルタイムで表示装置10、10に表示し、また、予め入力された起重機船2a、2bの適正な相対位置データと、受信した相対位置データとの比較結果をリアルタイムで表示装置10、10に表示する。
(もっと読む)
鉄塔搬送用補助装置
【課題】 鉄塔を搬送するための作業を容易にする技術を提供する。
【解決手段】 鉄塔TにワイヤWを介して接続される第1部材100と、連結位置で第1部材100に連結可能な第2部材200を備え、第1部材100と第2部材200を連結させた状態で第2部材200を吊り上げることにより鉄塔Tを吊り上げ可能な鉄塔搬送用補助装置であって、第1部材100と第2部材200のうち、いずれか一方の部材には第2部材200を連結位置に案内する案内部220が設けられている。
(もっと読む)
搬送手段の制御システム
【課題】 従来の搬送手段における制御システムでは、作業者が、良好な操作感覚で荷物を昇降させることができない上に、荷物の把持と操作レバーの操作とを同時に行って荷物を水平移動させることができない。
【解決手段】ロープ2の下部に掛かる力であって作業者による上下方向の操作力、荷物の質量および荷物の加速度による力の大きさを計測する力計測手段3と、力計測手段3の計測結果に基づき第1演算部がサーボモータの回転の方向および速度を演算してサーボモータに駆動指令の信号を出す第1制御手段4と、ロープ巻揚げドラムから巻き下げられたロープ2の長さを計測する長さ計測手段と、ロープ2によって吊り下げられた荷物の重量を計測する重量計測手段と、作業者が荷物を水平方向へ押した時のロープ2が垂直面とで成す振れ角の角度を計測する角度計測手段と、長さ計測手段、重量計測手段および角度計測手段からの計測情報に基づき第2演算手段7がクレーンの走行条件を演算してクレーンに駆動指令の信号を出す第2制御手段と、を具備したことを特徴とする。
(もっと読む)
懸垂式昇降搬送装置における搬送台車の教示装置
【課題】 懸垂式昇降搬送装置用台車において、昇降制御を受け、被搬送用キャリアのフランジを把持、開放を行う一対のフィンガに関し、制御上の空間座標位置から前記フランジを適正に把持する空間座標位置に移行するに必要な補正値を正確に得ること。
【解決手段】 ウエハ等の被搬送物の搬送に際して、実際に稼動するキャリアに比べて、形状精度が十分高い位置補正用基準治具5を所定の載置台3に正規に位置決めし、当該位置補正用基準治具5のフランジ5aに対して一対のフィンガ24ca、24cbが所望の状態に把持されるハンド部24の空間座標位置を把握することにより、この空間座標位置と制御上の空間座標位置とを特定する各要素に基づいて基準となる補正値を得る。
(もっと読む)
1 - 16 / 16
[ Back to top ]