
Fターム[3G093CB05]の内容
車両用機関又は特定用途機関の制御 (95,902) | 制御・作動条件(機関以外) (4,250) | 過渡時 (2,646) | 発進時 (433)
Fターム[3G093CB05]に分類される特許
161 - 180 / 433
運転支援システム
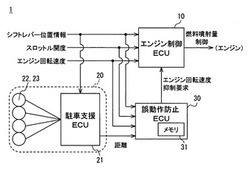
【課題】車両が意図しない方向に進行した場合であっても、車両の周囲に位置する障害物への突入事故の発生をより低減することのできる運転支援システムを提供する。
【解決手段】誤動作防止ECU30は、車両Cの走行時には、メモリ31に記憶保持されている対応マップT1を用いて、駐車支援装置20によって検出される障害物までの距離に基づき、エンジン回転速度の限界値を設定する。一方、誤動作防止ECU30は、車両Cの発車時には、上記対応マップT1を用いて、メモリ31に記憶保持されている障害物までの距離に基づき、エンジン回転速度の限界値を設定する。そして、誤動作防止ECU30は、実際のエンジン回転速度が、設定したエンジン回転速度の限界値よりも大きいと判断する場合に、車両Cの駆動力を、その判断時の実際のエンジン回転速度に基づいて定まる駆動力よりも抑制する旨の指示を、エンジン制御ECU10に与える。
(もっと読む)
運転支援装置

【課題】本発明は、交差点のより安全な通行を支援することができる運転支援装置を提供する。
【解決手段】本発明に係る運転支援装置1は、交差点P入口の一時停止線Sの位置を検出するナビゲーションシステム3と、一時停止線Sの手前において運転者によるアクセル操作を無効化するエンジンECU8と、一時停止線Sにおける車両Aの停止後、運転者が交差点P周囲の交通状況を確認するための所定の確認動作を検出する確認動作判断部13と、確認動作判断部13による確認動作の検出後、運転者によるアクセル操作を有効化するエンジンECU8と、を備える。この運転支援装置1によれば、一時停止後アクセル操作による加速の前に運転者に確認動作を確実に行わせることができるため、交差点のより安全な通行を実現することが可能になる。
(もっと読む)
エンジンの燃料供給を制御するためのシステム
【課題】車両の重量が大幅に変化する場合であっても、当該車両を常に円滑に発進させることができるシステムを提供するを提供する。
【解決手段】エンジンのスロットルセンサに選択的に通信するコントロールユニットを含み、コントロールユニットは、車両の推定重量が得られるように構成され、スロットルセンサからの信号を受信し、車両を発進させる際に、エンジンに対してスロットル位置が予め定められた位置を越えた場合に決定される高スロットル要求が、高目標エンジン速度に到達したことを検出し、コントロールユニットは、高スロットル要求を検出した場合に、車両の推定重量に基づくエンジン速度に関連して、予め設定された高スロットル傾斜率を調整する。
(もっと読む)
自動変速機の制御のための方法
【課題】運転者の希望(に基づく操作)と自動車の反応との間の遅延(時間差)が最小化され、とりわけ発進過程においての走行快適性が改善されるような自動変速機の制御方法、を提供すること。
【解決手段】本発明は、自動車のパワートレイン(駆動力伝達系)における自動変速機の制御方法であって、ある発進過程が、運転者の発進の希望が検出された時に、当該パワートレインにおける駆動エンジンと変速機との間でトルクを伝達するために、クラッチ制御部及び変速機制御部を制御するための少なくとも一つの変速機制御ユニットを介して実施されるようになっており、前記発進の希望の検出時に、駆動エンジンが活動状態であるか否かが検証されると共に、開放状態のクラッチがトルク伝達のための接触点へと調整されることを特徴とする方法である。
(もっと読む)
ハイブリッド車両を発進させるための方法と装置
本発明は、第1の駆動ユニット(1)および第2の駆動ユニット(2)を有し、該第1の駆動ユニット(1)は2つの部分伝動装置(T1,S1;T2,S2)を有するダブルクラッチ伝動装置の第1の部分伝動装置(T2)に配置されている、ハイブリッド車両を発進させるための方法に関する。この方法においては、第1の駆動ユニット(1)を用いてハイブリッド車両を発進させる際に、ロールバックを阻止するために、ダブルクラッチ伝動装置を含むパワートレーン(3)に掛っているテンションを途切れさせることなく前記第2の駆動ユニット(2)を始動させる。  (もっと読む)
(もっと読む)
車両の制御装置
【課題】EGR弁閉じ異常時において失火発生抑制のためスロットル弁開度を大きくすることに起因する内燃機関の出力トルクの増大に伴って発生する問題に対処すること。
【解決手段】車両停止中において、EGR弁閉じ異常の発生を受けて失火抑制制御によりスロットル弁開度が大きくされた場合、急発進抑制制御により自動変速機の減速比が小さくされる。この結果、駆動輪の駆動トルクが減少し、失火抑制制御に起因するエンジン出力トルク増大により車両発進時の加速度が過剰となる事態の発生が抑制される。急発進抑制制御が実行された状態で車両発進後、車体速度が所定速度に達した場合、車速抑制制御により自動変速機の減速比が大きくされる。この結果、車体速度が、減速比が大きい変速段の場合におけるエンジンの最大運転速度に対応する速度以下に制限されるから、エンジン出力トルク増大により車両走行時での車体速度が過剰となる事態の発生が抑制される。
(もっと読む)
車両の制御装置
【課題】ホイールブレーキ装置の不調時であっても、車両のヒルホールド制御を行うことができる車両の制御装置を提供する。
【解決手段】制御装置17は、ヒルホールド制御手段の不調を検出する不調検出部23と、不調検出部23によってヒルホールド制御手段の不調が検出されると、ヒルホールド制御を行うべきときに、複数の摩擦締結要素のうち、車両の発進時に必要な変速段を形成するための所定の摩擦締結要素、及びこの所定の摩擦締結要素以外の摩擦締結要素に締結トルク容量を付加して自動変速機3をインターロックさせるインターロック部27と、を備える。
(もっと読む)
車両の制御装置
【課題】安全性を維持しながら、エンジンの自動停止の頻度を増やして燃費を向上させることができる車両の制御装置を提供する。
【解決手段】車両停止時且つホイールブレーキ63の液圧が所定のしきい値以上であるときにエンジン1を自動停止させ、また、所定の条件下でエンジン1を自動始動するエンジン自動停止始動制御手段と、エンジン1が自動停止しているとき、ホイールブレーキ63の液圧を保持するようになっているブレーキ自動制御手段と、エンジン1を自動始動させるとき、エンジン1が自動停止しているときの変速段を形成するのに必要な所定の摩擦締結要素及び所定の摩擦締結要素以外の摩擦締結要素に締結トルク容量を付加することにより自動変速機3をインターロックさせるインターロック手段と、を有する制御装置57とする。
(もっと読む)
車両用過給装置
【課題】この発明は、電動発電機とエンジンとを一方向クラッチ付きプーリを用いてベルト結合し、コンプレッサを、低速域では発電電動機で駆動し、高速域ではエンジンで駆動できるようにして、インバータおよびバッテリの大容量化を抑え、さらにインバータが故障しても、コンプレッサをエンジンで駆動できる安価な車両用過給装置を得る。
【解決手段】電動発電機10とエンジン1とがクランク軸2に装着されたクランクプーリ3と、回転軸13に装着された一方向クラッチ付きプーリ22とに掛け渡された第1ベルト4により連結されている。そして、電子制御ユニット40が、エンジン回転数が所定値以下の場合に、電動発電機10を電動機として駆動して、コンプレッサ7を電動発電機10により駆動させる。
(もっと読む)
車載装置
【課題】駐車場などの施設内において、自車両の急発進を抑止する車載装置を提供する。
【解決手段】自車位置検出部11で検出した自車位置と、地図データ記憶部12から、自車両が施設に進入したと判定されると、ナビゲーション装置1はエンジン制御装置3に対して、燃料噴射量の上限を、自車両が急発進しない程度の量である所定の量に制限するよう指示する。指示を受けたエンジン制御装置3は、燃料噴射量の上限を所定の量に設定する。自車両から道路までの距離が所定の距離以下になり、方向指示器4の点滅が行われたことを示す信号が車体制御装置2からナビゲーション装置1へ送信されると、ナビゲーション装置1は、燃料噴射量の制限を解除する。
(もっと読む)
走行制御装置
【課題】ドライバによる人為的な誤操作があったとしても、ドライバの意図せぬ車両の走行(具体的には車両の急発進)を効果的に防ぐことができる走行制御装置を提供する。
【解決手段】走行制御装置は、シフトポジションが前進から後退に切り替わったことを検知した場合、アクセル開度を一時的に制限してエンジントルクを一時的に絞ることにより、車両の走行を制御する。また、走行制御装置は、シフトポジションが前進から後退に切り替わったことを検知していない状態において、車両が後退走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御する。
(もっと読む)
車両の制御装置及び制御方法
【課題】本発明は、車両の制御装置及び制御方法において、加速ピーク後の立ち下がり時の加速度を制御することで、立ち下がり時のトルク感のある加速度波形(G波形)を演出して、車両の加速感を高めることができる車両の制御装置及び制御方法を提供することを目的とする。
【解決手段】S7では、この目標加速度Gの時系列データをもとに、エンジン出力をフィードバック制御で制御する。具体的には、車両の実加速度Gが目標加速度Gとなるように、スロットル開度や点火タイミング等を変化させてエンジン出力を制御する。
(もっと読む)
車両の制御装置及び制御方法
【課題】本発明は、車両の制御装置及び制御方法において、加速ピーク後の立ち下がり時の加速度を制御することで、運転者の走りの意図を踏まえて、トルク感のある加速度波形(G波形)を演出して、運転者の要求を満足できる車両の制御装置及び制御方法を提供することを目的とする。
【解決手段】S7では、加速度Gデータの履歴と運転者の意図から目標加速度Gの時系列データを設定する。この目標加速度Gの時系列データは、図示しないマップデータで算出するようにしている。この目標加速度Gの時系列データは、運転者の意図に応じて変化するように設定している。
(もっと読む)
無段変速機の制御装置
【課題】エンジンの空吹けを抑制する無段変速機の制御装置を提供する。
【解決手段】インヒビタスイッチ56によって、セレクトレバー51がNレンジからDレンジへ変更されてと判定された場合に、疑似D判定用基準時間t_false_refの間に、プライマリプーリ回転速度センサ41dからパルス信号が出力されなかった場合には、マニュアルバルブ57と前進クラッチ32とが連通状態となっていないと判定し、エンジン回転速度をアイドル相当のエンジン回転速度に規制する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 エンジンの動力を用いた発進を実現しつつ、エンジンストールを防止できるハイブリッド車両の制御装置を提供すること。
【解決手段】 モータジェネレータMGと駆動輪RL,RRとを断接する締結要素(第2クラッチCL2)と、上記締結要素に所定の締結トルク容量TCL2を付与してスリップ締結しつつエンジンEとモータジェネレータMGとを直結状態としてエンジンEを動力源に含みながら発進する発進制御手段(発進制御処理部410)と、低温時であるか否かを判定する低温時判定手段(ステップS2)と、を備え、発進制御手段は、エンジン回転数Neが所定値(図6参照)となるようにモータジェネレータ出力トルクTmを制御し、低温時と判定されたときは、エンジン出力トルクTeを増大させ、その分ΔTeだけTmを回生側に増大させることとした(ステップS4)。
(もっと読む)
車両の駆動力制御装置
【課題】サイドブレーキやパーキングブレーキの操作を解除したときに、車両が後方にずり下がってしまうのを防止しつつ、モータの三相のうちの一相に電流が集中するのを防止する。
【解決手段】車両の駆動力制御装置は、インバータ9を制御する4WDコントローラ24と、サイドブレーキ51及びパーキングブレーキ52のオン及びオフ状態を検出するブレーキ操作検出部53と、電動モータ3と後輪1RL,1RRとの間を接続及び遮断する電磁クラッチ11とを備える。4WDコントローラ24は、サイドブレーキ51又はパーキングブレーキ52がオン状態であり、かつ電磁クラッチ11が接続状態にある場合、インバータ9を三相短絡にする。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】停車保持の指示に基づく停車時からの発進性能を向上させる。
【解決手段】登坂路などで停車した後にブレーキペダルを戻してもブレーキを保持する停車保持制御を解除して発進する際には(S400,S450)、実行用トルクT*の絶対値が値0を含む所定トルクTref未満の範囲内を変化するときにギヤ機構の歯打ち音などを抑制するために十分に小さく設定された第2レートΔT2より大きくなるように、且つ、通常の走行時に用いる比較的大きな第1レートΔT1以上になるように、第3レートΔT3を設定し(S490,S500)、この第3レートΔT3を用いて要求トルクTr*に向けてレート処理により実行用トルクT*を設定して(S510)、実行用トルクT*が出力されるようモータMG2を制御する。これにより、ブレーキホールドスイッチがオンとされ開始された停車保持制御を解除して発進する際の発進性能を向上させることができる。
(もっと読む)
車両用走行制御装置及びその方法
【課題】運転者の発進操作に合致させて自車両を自動発進させる。
【解決手段】走行制御装置は、先行車両の走行状態を検出する先行車発進判定部24と、自車両のブレーキペダルの操作状態を検出するブレーキ操作状態判定部25と、自車両の制動力及び駆動力の少なくとも何れかを制御するとともに、先行車発進判定部24が先行車両の発進を検出した後、ブレーキ操作状態判定部25がブレーキペダルが踏み込み状態から戻され始めたことを検出すると、先行車両の走行状態を基に自車両が発進可能な制駆動力を制御する目標追従発進加速度算出部26と、を備える。
(もっと読む)
車両の発進制御装置
【課題】 駆動輪側のイナーシャ変化によらず第2締結要素の締結ショックを回避可能な車両の制御装置を提供すること。
【解決手段】 発進制御手段によるスリップ締結から完全締結への移行時において、駆動輪の慣性が所定値よりも小さいときは、所定の締結トルク容量を低下させることとした。
(もっと読む)
追従走行制御装置
【課題】追従走行の発進時に、制御のもたつきや先行車の挙動に起因にした変動のない、スムーズで滑らかな発進を実現する。
【解決手段】判断部22により先行車の発進と判断すると、検出部21の検出に基づき、先行車に対する自車1の追従状況に応じて時々刻々変化するFF制御の目標値を設定部23が設定する。そして、FF制御部24の走行制御により、設定された目標値に基づき、先行車の時々刻々の発進状況に応じたFF制御で自車がもたつきや変動のない、スムーズで滑らかな発進を実現する。
(もっと読む)
161 - 180 / 433
[ Back to top ]