
Fターム[3J102DB05]の内容
その他の軸受(磁気軸受、静圧軸受等) (9,013) | 磁気軸受の制御 (942) | 検出対象 (244) | 位置(変位)を検出 (209)
Fターム[3J102DB05]に分類される特許
1 - 20 / 209
磁気軸受
真空ポンプ
【課題】センサの取り付け位置調整をすることなく良好な計測信号を得ることが容易に可能な物理量計測装置、及び該物理量計測装置を備えた磁気浮上装置、真空ポンプを提供する。
【解決手段】コイルのインダクタンス変化によって振幅変調された高周波電圧に基づいて物理量を計測するセンサにおいて、コイルに被変調高周波電圧の周波数特性又は高周波電圧の周波数の可変手段を設けることによって、コイル又はそのコアの取り付け位置調整を必要とせずにセンサ感度の調整を可能にする。また、差動手段を設け、計測信号と調整可能な基準値信号の差を出力することにより、消費電力を低減し低飽和増幅器の採用を可能にする。更に、上記の調整手段を磁気軸受若しくは真空ポンプの機構部に配置することによって、機構部とコントローラの互換性を向上する。
(もっと読む)
磁気軸受制御システムおよび磁気軸受制御方法

【課題】ロータの機器浮上時において、補助軸受に支えられた状態から基準位置までロータを段階的に浮上させるようにして、ロータの急激な浮上を防止した磁気軸受制御システムおよび磁気軸受制御方法を提供する。
【解決手段】ロータの上下に配置され通電によりロータを基準位置に磁気的に浮上させるコイルと、ロータの上下に配置されロータ位置を検出する位置検出器と、前記位置検出器からの信号に基いて前記各コイルに電流指令を与えるサーボ制御器を備え、前記位置検出器からのロータ位置のフィードバックにより前記コイルへの通電を制御する磁気軸受制御システムにおいて、ロータの上下に配置されロータの磁気浮上前にロータを支える補助軸受と、ロータの磁気浮上時に、前記補助軸受の間でロータを上記基準位置まで段階的に浮上させるように前記サーボ制御器を制御する制御部を設けた。
(もっと読む)
磁気軸受
【課題】制御電流用コイルとバイアス電流用コイルとが別個に設けられた磁気軸受けにおいて、巻線工程を簡略化できるようにする。
【解決手段】円環状のバックヨーク(23)を設ける。バックヨーク(23)の内周沿いに、回転軸(13)と対向する複数のティース(24)を設ける。それぞれのティース(24)には第1コイル(Cd)(制御電流用コイル)を設ける。ティース(24)に波巻されて形成された第2コイル(Cb)(バイアス電流用コイル)を設ける。
(もっと読む)
磁気軸受及びそれを用いた圧縮機
【課題】磁気軸受において、制御電流と合成電磁力の線形性を保ちつつ、電磁石のコイルで消費する電力を低減できるようにする。
【解決手段】複数の電磁石(24)を有し、負荷(Ld)が変動する駆動軸(13)に、該複数の電磁石(24)の合成電磁力(F)を付与するステータ(21)を設ける。負荷(Ld)とは逆方向の電磁力を発生する電磁石(24)のコイル(23)に流す第1コイル電流(IU)(上側コイル電流)と、負荷(Ld)と同方向の電磁力を発生する電磁石(24)のコイル(23)に流す第2コイル電流(IL)(下側コイル電流)との電流差を制御して駆動軸(13)の位置制御を行う制御部(30)を設ける。制御部(30)では、第2コイル電流(IL)の平均値が低下するように、第2コイル電流(IL)を逐次調整する。
(もっと読む)
磁気軸受装置
【課題】回転体の磁気軸受装置において、その各電磁石の容量を自由に設計でき、負荷容量を過不足なく設定できる磁気軸受装置を提供する。
【解決手段】回転体の磁気軸受において、回転体の並進運動を制御する並進運動制御回路23と、該回転体の傾斜運動を制御する傾斜運動制御回路24を具備する磁気軸受制御装置において、ラジアル電位センサ部の信号を入力として、ラジアル電磁石のx、y方向の力に作用する不平衡消去回路36を並列接続した。
(もっと読む)
磁気軸受機構
【課題】磁気軸受機構において、部品点数や消費電流の増加を抑制しつつ、ロータに外力方向逆側の力を作用させる。
【解決手段】外力が作用するロータと、ロータの外周面を覆う筒部、筒部の軸方向両側のうち外力方向に形成される第1端壁部、及び筒部の軸方向両側のうち外力方向逆側に形成される第2端壁部を有するステータコアと、第1端壁部からロータに作用する上記外力方向への吸引力、及び上記第2端壁部から上記ロータに作用する上記外力方向逆側への吸引力の双方を発生させるようにステータコアの筒部内に固定される永久磁石とを備えた磁気軸受機構について、上記ステータコア及びロータの一方又は両方を、永久磁石に起因する上記外力方向逆側への吸引力が、永久磁石に起因する上記外力方向への吸引力よりも大きくなるように構成する。
(もっと読む)
ターボ機械
【課題】
機能性を損なうことなくターボ機械の製造費用を削減する。
【解決手段】
機械ハウジング(1)と、少なくとも1つのインペラ(3)を支持するロータシャフト(2)と、少なくとも1つの能動型磁気軸受(5A,5B)を備える軸受装置と、少なくとも1つのギャップセンサ(6A,6B)と、このギャップセンサ(6A,6B)に接続された、能動型磁気軸受(5A,5B)を制御するための制御機器(8)とを有するターボ機械であって、ギャップセンサ(6A,6B)によって位置決定をするために、ロータシャフト(2)に、ギャップセンサ(6A,6B)と協働するターゲット面(7A,7B)が配設されている形式のものにおいて、ターゲット面(7A,7B)として、ロータシャフト(2)のベース材料上に形成された銅層を設ける。
(もっと読む)
磁気浮上式真空ポンプ、振れまわり推定方法、ロータバランス検査方法および磁気軸受制御ゲイン調整方法
【課題】高速回転状態での振れまわり測定を行うことなく、波形振幅値を用いて振れまわりを容易に推定することができる振れまわり推定方法の提供。
【解決手段】磁気浮上式真空ポンプの振れまわり推定方法は、ロータ30を目標浮上位置に磁気浮上させる磁気浮上工程と、目標浮上位置に磁気浮上しているロータ30を複数の回転位置に順に停止させ、各停止時における2対の電磁石の電流をそれぞれ計測する電流計測工程と、2対の電磁石の少なくとも一方の対に関して、対を成す電磁石の電流の差分を複数の回転位置の各々について算出する差分算出工程と、ロータ30が一回転する間の差分の変化の振幅値を算出する振幅値算出工程と、予め得られている振れまわり量と振幅値との相関関係および振幅値算出工程で算出された振幅値に基づいて、ロータ30の振れまわり量を推定する推定工程と、を有する。
(もっと読む)
磁気軸受装置及び該磁気軸受装置を搭載した固液分離機
【課題】電磁石の電源が入っているときには所定の剛性を維持でき、電源が切られた際にはベアリングにタッチダウン可能で、かつ制御方向に直角な偏心に対しても有効に作用しつつこの偏心方向には磁束の漏れが少ない磁気軸受装置及び該磁気軸受装置を搭載した固液分離機を搭載した固液分離機を提供する。
【解決手段】固定子コア29の下面には2つの電磁石鉄心29a、29bが突設されている。この2つの電磁石鉄心29a、29bの間に一つの環状スロット49が形成されている。この環状スロット49と電磁石鉄心29aの内側及び環状スロット49と電磁石鉄心29bの外側とにそれぞれ巻線を配設する。一方、回転子コア35の上面には、この電磁石鉄心29a、29bに対峙するように回転軸を中心として環状に磁性体51、53が突設されている。この磁性体51、53の間に環状の永久磁石55が固着されている。
(もっと読む)
磁気浮上式真空ポンプ
【課題】コストアップを抑えつつ、回転体が過熱判定温度を超えたことを検知することができる磁気浮上式真空ポンプの提供。
【解決手段】磁気浮上式真空ポンプでは、ロータ30とロータシャフト33とが一体化された回転体はモータ36により回転駆動され、その回転体はラジアル磁気軸受37およびスラスト磁気軸受38を備える磁気軸受装置によって所定位置に磁気浮上している。そして、真空ポンプは、回転体を構成するロータシャフト33に熱的に接触するように設けられ、回転体を構成するロータ30の過熱判定温度に対応したキュリー温度Tcを有する磁性体41と、磁性体41を吸引して回転体に対して軸方向の力を作用する永久磁石40と、スラスト磁気軸受38の励磁電流を検出する電流センサと、電流センサで検出される励磁電流Iの変化から、回転体を構成するロータ30の温度が過熱判定温度を超えたか否かを判定する判定回路と、を備えている。
(もっと読む)
回転シャフトの軸方向位置検出装置とそのターボ分子ポンプ用途
【課題】線形性を向上させ、かつ製造コストを減少させた回転機械の回転シャフトの軸方向位置の検出装置を提供する。
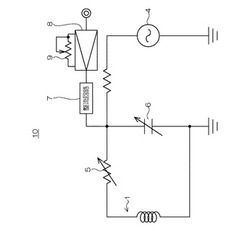
【解決手段】回転シャフト10の端部11に設置された強磁性材料のターゲット12と、エアギャップ60を残しつつ回転機械の構造に固定され、ターゲットと対向配置された固定磁気回路32に接続された誘導コイル31と、誘導コイルに給電するための給電回路とを含む装置であり、給電回路が、誘導コイルの第1端部と基準電圧(0V)に位置する領域との間に接続されたAC電源と、誘導コイルの第1端部と第2端部との間に接続された少なくとも1つのコンデンサと、第2端部と基準電圧に位置する領域との間に挿入された検出器デバイスとを、第2端部と基準電圧に位置する領域との間を流れる電流の大きさについての情報をライン上に供給するために有し、情報は、所定の公称値e0を有するエアギャップの幅の変更値xを表す装置である。
(もっと読む)
封入磁石アセンブリ及びその製造方法
【課題】腐食環境下でも良好な磁気軸受を提供する。
【解決手段】本発明は、封入磁石アセンブリを提供し、このアセンブリは、少なくとも1つの壁164を含み且つ少なくとも1つのアパーチャを画定するハウジング内に設けられた磁石158と、ハウジングカバーとを含む。ハウジングカバーは、磁性材料からなる第1部分154と非磁性材料からなる第2部分152を含み且つアパーチャを密閉するように構成されており、第1部分が第2部分に固定して取り付けられ、ここで取り付け部分が熱処理されている。ハウジングの壁164は、非磁性材料で形成され、ハウジングカバーの第2部分に固定して取り付けられている。
(もっと読む)
磁気浮上制御装置
【課題】質量の大きな物体の非接触支持が可能な磁気浮上制御装置を提供する。
【解決手段】浮上体30に対向する磁極から浮上体を磁気浮上させる磁束を発生する支持力発生用永久磁石21と、支持力発生用永久磁石21の浮上体30に対向する側で、前記磁極と同一の磁極が互いに向き合い、反対の磁極が向き合わないように配置された複数の磁力制御用永久磁石13、14と、磁力制御用永久磁石13、14の向き合う磁極の間隔を、浮上体に作用する磁力を強めるときには狭くし、弱めるときには拡げるように磁力制御用永久磁石を動かすアクチュエータ15、16とを備える。磁力制御用永久磁石の間隔を狭くすると、浮上体に達する支持力発生用永久磁石の磁束が集中し、浮上体に作用する磁力が強くなる。逆に、磁力制御用永久磁石の間隔を広くすると、磁束の集中が緩和され、浮上体に作用する磁力が弱くなる。
(もっと読む)
磁気軸受装置、および回転機械
【課題】曲げ振動モードの固有周波数を安定化できる磁気軸受装置と、このスラスト磁気軸受を備えた回転機械を提供する。
【解決手段】シャフト5と一体に回転するスラストディスク27と、磁力によりスラストディスク27のスラスト力を支持するスラスト磁気軸受25と、スラストディスク27の傾きを検出する第1ラジアルセンサ23aおよび第2ラジアルセンサ23b(傾斜検出手段)と、第1ラジアルセンサ23aおよび第2ラジアルセンサ23bに検出された傾きに起因する所定周期の振動によって、スラスト磁気軸受25の磁力を制御するコントローラ21(制御部)と、から構成され、スラスト磁気軸受25は、周方向に複数に分割された第1電磁石26aおよび第2電磁石26b(磁力発生部)を有し、コントローラ21は、第1電磁石26aおよび第2電磁石26bを各々制御することを特徴としている。
(もっと読む)
モータ制御装置
【課題】制御遅延や電流応答遅延が発生しても遠心力低減効果が低下せず、適切な軸位置指令値を求めるのに大きな負担を必要としないモータ制御装置を提供する。
【解決手段】振れ回り抑制制御部30において、ローパスフィルタLPFによって軸変位検出値dqから軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50によって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値α*,β*を演算する。そして、前記振れ回り抑制制御部30で演算された軸変位指令値α*,β*を軸支持制御部20に入力する。
(もっと読む)
モータ制御装置
【課題】複数のユニットを有するモータ制御装置において、大きな負担を必要とせずに、モータ軸の振れ回りを抑制する。
【解決手段】軸変位検出値α1,β1,α2,β2から、軸変位検出値の並進運動成分αp,βpと回転運動成分αr,βrとを求め、前記並進運動成分αp,βpと回転運動成分αr,βrのそれぞれについて、ローパスフィルタLPF1によって、軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50a,50bによって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値の並進運動成分αp*,βp*と回転運動成分αr*,βr*を演算する。そして、軸支持制御部20において、軸変位指令値の並進運動成分αp*,βp*と回転運動成分αr*,βr*に基づいて、各モータの軸変位指令値を算出する。
(もっと読む)
反発力と吸引力による磁気浮上装置
【課題】反発力と吸引力で、電磁石を用いて強磁性体の磁気浮上を可能とする。
【解決手段】2個以上の電磁石3を、サークル状に極を同じに揃えて配置し、位置センサー2と各電磁石の磁力を制御装置4でコントロールする事で、強磁性体1の磁気浮上を可能とした。
(もっと読む)
磁気浮上装置
【課題】 ゼロパワー制御により電磁石への励磁電流を常にゼロに収束させる方式において、定常的な外力に起因する浮上体の位置変動を抑制することができ、且つ動的な外力が作用した場合でも良好な追従性を得る。
【解決手段】 浮上体10と、浮上体10に永久磁石及び電磁石による磁気回路を形成する磁石ユニット23と、磁石ユニット23を固定する可動枠22と、可動枠22を支持する固定枠21と、固定枠21に対して可動枠22を支持すると共に固定枠21と可動枠22との距離を調整可能な可動枠支持機構27と、浮上体10と磁石ユニット23との相対変位を測定する第1のセンサ24と、固定枠21と可動枠22との相対変位を測定する第2のセンサ25と、第1及び第2のセンサ24,25の各出力に応じて電磁石の電流を制御することにより浮上体10を安定的に非接触支持する制御部と、を備えた。
(もっと読む)
磁気浮上型回転導入機
【課題】磁性流体シールを使用する必要がない磁気浮上型を採用し、しかも装置としてのアキシャル方向の長さを極力短くすることができるようにする。
【解決手段】回転動力を出力する回転子12を備え、回転子12は、回転子12のラジアル方向に配置されて該回転子12のラジアル方向変位を非接触で制御する2組以上のラジアル磁気軸受40と、回転子12の周囲に3組以上に分割配置されて該回転子12のアキシャル方向変位を非接触で制御するアキシャル磁気軸受50によって、所定の位置に非接触で回転支承され、ラジアル磁気軸受40のラジアル電磁石44とアキシャル磁気軸受50のアキシャル電磁石54は、略同一平面上に配置されてケーシング部14に固定されている。
(もっと読む)
1 - 20 / 209
[ Back to top ]