
Fターム[3J552RB22]の内容
伝動装置(歯車、巻掛け、摩擦)の制御 (81,513) | 車両走行状態 (2,755) | 登坂時 (182)
Fターム[3J552RB22]に分類される特許
121 - 140 / 182
鞍乗型車両

【課題】選択された運転モードに関係なく、簡単な操作で急加速することができる鞍乗型車両を提供することである。
【解決手段】制御装置10は、複数の運転モード(A、B)を相互に切り替える第1制御と、複数の運転モード(A、B)のうちの少なくとも2つの運転モードの各々において、シフトダウン操作子30の操作に応じて、当該運転モード(A、B)の変速比をLow側にシフトするキックダウン状態(A1、B1)に移行させる第2制御とを実行することを特徴とする、鞍乗型車両100である。
(もっと読む)
車両、車両の制御装置および車両の制御方法

【課題】駆動装置の保護と駆動要求の達成とが両立された車両を提供する。
【解決手段】車両1は、車輪38に駆動力を与える駆動装置11と、車輪38に制動力を与える制動装置88と、駆動装置11と制動装置88を制御する制御装置50とを備える。制御装置50は、車両1の進行方向と駆動力の作用する方向が逆方向である場合に、駆動力要求(Acc)どおりの駆動力を駆動装置11で発生させても駆動装置11が動作禁止領域で動作しないときには、駆動力要求(Acc)どおりの駆動力を駆動装置11で発生させる。制御装置は、駆動力要求(Acc)どおりの駆動力を駆動装置で発生させると駆動装置が動作禁止領域で動作するときには、駆動力要求(Acc)に応じて制動装置88を作動させる。
(もっと読む)
車両用駆動力制御装置
【課題】実際の自車速と運転者の意思に基づいて設定される目標車速に基づいて自車速を制御する場合に、走行環境や運転者の意思による車両の操作量が様々な状況である場合においても、運転者の意思に合う制御が行われることが可能な車両用駆動力制御装置を提供する。
【解決手段】実際の自車速と、運転者の意思に基づいて設定される目標車速とに基づいて、自車速を制御する車両用駆動力制御装置であって、横加速度に応じて車速制御態様を変更する手段508と、実際の自車速と前記目標車速との相対車速に基づいて、前記横加速度に応じた車速制御態様の変更度合いを変更する手段とを備えている。
(もっと読む)
車両の駆動制御装置
【課題】無段変速機(CVT)を有する車両の駆動制御装置において、キックダウンのときにエンジンの回転速度をより急激に上昇できるようにすること。
【解決手段】キックダウンのときにエンジン2の出力軸3に慣性力Ifを付与するためのゼロイナーシャユニット8が設けられている。ゼロイナーシャユニット8は、遊星ギヤ機構24とフライホイール25とを含んでいる。遊星ギヤ機構24を介したフライホイール25とエンジン2の出力軸3との間の動力の伝達のオン/オフが、第2のクラッチ26によって行われる。キックダウンのときに、フライホイール25の回転速度ωfがゼロまたはゼロに近似した値となることを条件として、第2のクラッチ26がオフにされる。
(もっと読む)
自動変速機の変速制御装置
【課題】通常、起こり得ないダウンシフトが起こる場合にのみ運転者へ警告する、違和感のない警告システムを備える自動変速機の変速制御装置を実現する。
【解決手段】マニュアルモードを備えた自動変速機の変速制御装置において、自動変速機のオイル温度検出手段と、マニュアルモード選択時にオイル温度が設定値より高い場合に使用される、通常温度用変速マップとは異なる変速点を備えた高温用変速マップとを設け、マニュアルモードが選択され、かつ高温用変速マップが使用されている状態において、自動的にダウンシフトされる領域にあるとき、この領域が通常温度用変速マップでは同じパターンのダウンシフトが発生しない領域であると判定された場合には、運転者に警告する警告手段を備えている。
(もっと読む)
無段変速機
【課題】3軸構造の無段変速機において、前進時及び後進時に十分な駆動力を発生する。
【解決手段】本発明は、3軸構造の無段変速機において、前後進切替機構(3)がサンギア(13)、第1のピニオンギア(23)、第2のピニオンギア(24)及びリングギア(15)を備え、さらに車両の前進時にリングギア(15)の回転を係止するフォワードブレーキ(29)と、車両の後進時にキャリア(14)の回転を係止するリバースブレーキ(31)と、車両の前進時にキャリア(14)と出力側とを連結するフォワードクラッチ(26)と、車両の後進時にリングギア(15)と出力側とを連結するリバースクラッチ(28)とを備える。
(もっと読む)
自動変速機の制御装置
【課題】登坂路走行、降坂走行、牽引走行などの走行抵抗が大きく変化しても最適な全開アップ変速が得られるように変速点の学習を行う、車両用自動変速機の変速制御装置を提供する。
【解決手段】基準エンジン回転加速度算出手段74により基準エンジン回転加速度A2が算出され、推定最大エンジン回転速度推定手段72により前記基準エンジン回転加速度A2と変速出力時点におけるエンジン回転加速度A1との関係に基づいて推定最大エンジン回転速度NEcが推定され、学習補正値算出手段80により、前記推定エンジン回転速度NEcと、変速出力時点における目標最大エンジン回転速度NEdとの差分ΔNEとに基づいた学習により、変速点の補正が行われるため、加速度が通常状態よりも異なる場合、すなわち、牽引(トーイング)時や登坂路走行時においても、加速度の大きさに関わらずその変速の際に学習および変速点の補正を行うことができる。
(もっと読む)
車両用自動変速機の制御装置
【課題】変速制御手段(定速走行制御手段)130による制御の終了と登降坂変速制御手段134による制御の開始が同時になされるべき状況において、自動変速機16の高速段への移行を禁止し、両手段による制御を連続的に行うことができる車両用自動変速機の制御装置を提供する。
【解決手段】路面の勾配に関する値を車両走行状態の値を用いて算出する勾配値算出手段140と、ブレーキ操作の有無を判定するブレーキ操作判定手段144と、変速制御手段130による変速制御中であってブレーキ操作が判定されるとブレーキ操作判定直前の路面勾配に関する値を登降坂変速制御手段134に出力し、登降坂変速制御を実行する登降坂変速実行手段136とを設ける。
(もっと読む)
自動車の走行抵抗を検出する方法
【課題】
走行抵抗F-fw の変更が変更中に早期に検出できて、変速の場合によっては必要な修正を適宜に実施できる走行抵抗F-fw を検出する方法を提供すること。
【解決手段】
この発明は、自動車が自動変速機の変速部と接続していて負荷ギアから目標ギアへ変速され、第一走行抵抗値F-fw-1が変速の開始前に検出され、第二走行抵抗値F-fw-2が遅延時点に検出されて走行抵抗値の大きな変更ΔF-fw =F-fw-2−F-fw-1の際に変速の修正を行う自動車の走行抵抗を検出する方法に関する。
変速中に走行抵抗値F-fw の変更を早期に検出するために、第二走行抵抗値F-fw-2が変速中に検出され、変速の無牽引力位相を維持する時間間隔Δtにわたり自動車の現実加速aの複数の不連続値aiが把握され、この加速値aiから牽引変速の際に加速最小値a-minが決定され、推力変速の際に加速最高値a-maxが決定され、加速( a-min或いは
a-max )と車両質量の極値により第二走行抵抗値(変速中の走行抵抗)F-fw-2が
式F-fw-2=−m*a-min或いはF-fw-2=−m*a-maxにより算出されることが企図されている。 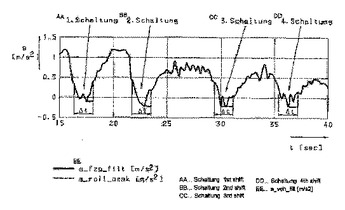 (もっと読む)
(もっと読む)
車両の制御装置
【課題】走行ノイズが周囲に与える影響が大きいタイミングで走行ノイズを抑制する。
【解決手段】目標変速比を設定するステップ(S100)と、騒音レベルNを検知するとともに、騒音レベルNを表示するステップ(S102)と、現在時刻Tおよび現在位置Pを検知するステップ(S108)と、現在時刻Tが深夜帯に含まれ(S110にてYES)、現在位置Pが人口密集地であり(S112にてYES)、騒音レベルNが許容値より大きいと(S114にてYES)、走行ノイズが周囲に与える影響が大きいことを運転者に知らせる警報を発生するステップ(S116)と、アクセルペダルの操作反力を大きくするステップ(S122)と、目標変速比を小さくするように変更するステップ(S128)とを含むプログラムを実行する。
(もっと読む)
自動変速機の変速制御方法
【課題】上り坂と下り坂が繰り返される傾斜路を走行する時に、頻繁な変速を防止して乗車感と燃費効率を向上させる自動変速機の変速制御方法を提供する。
【解決手段】本発明の自動変速機の変速制御方法は、走行路の勾配の有無を判断する勾配判断ステップと、前記勾配判断ステップで走行路が勾配路であると判断される場合、走行路の勾配をリアルタイムで計算する勾配計算ステップと、前記勾配計算ステップで計算された勾配をフィルタリングする勾配フィルタリングステップと、前記勾配計算ステップで求めた勾配と前記勾配フィルタリングステップで求めた勾配の大きさを比較して、大きい勾配に応じて変速を制御する変速制御ステップとを含む。
(もっと読む)
運転指向推定装置
【課題】車両の走行環境によって発生する運転者の意図と運転指向の推定値との乖離を改善することが可能な運転指向推定装置を提供する。
【解決手段】人工知能システムを用いて運転指向を推定する運転指向推定装置であって、前記人工知能システムで処理される運転者の操作量及び車両の状態量の少なくともいずれか一方のパラメータと、運転者の意思とが異なる予め設定された特定状況であるか否かを検出する手段と、前記特定状況である場合(S002−Y、S003−Y)に、前記パラメータを修正する手段(S004、S005)とを備えている。
(もっと読む)
自動変速機の制御装置
【課題】ニュートラル制御時のヒルホールド状態から坂道発進する際の制御等、自動変速機のブレーキ要素締結制御を、フェーシング温度によるブレーキ要素摩擦面の摩擦係数の変動に応じて的確に行えるようにする。
【解決手段】ヒルホールド制御において、ヒルホールド用ブレーキ要素のフェーシング温度をブレーキ要素の摩擦面を通って排出される潤滑油の温度を検出するよう配設した油温センサによって検出する。そして、フェーシング温度とブレーキ差回転に基づいて摩擦係数(μ)を算出し、摩擦係数(μ)と路面勾配に基づいて締結油圧(ブレーキ油圧)を設定する。
(もっと読む)
車両制御方法
【課題】従来の手法の抱える不都合を回避しつつ急停車後の再発進性を良化する。
【解決手段】エンジンが出力する駆動力をトルクコンバータを介してCVTに入力し駆動輪に伝達するようにしたものにおいて、前進レンジ若しくは後進レンジでの停車時に、CVTの変速比が所定閾値以下となっているかまたはその直前の走行状態から停車に至る過程での減速度が所定閾値以上であったことを判定し、前記変速比が所定閾値以下または前記減速度が所定閾値以上であると判定した場合にエンジン出力を増大させてクリープ力を補償する制御を行う。
(もっと読む)
車両用ベルト式無段変速機
【課題】すばやく正確に坂道判定を行い、ベルト滑りを防止することができる車両用ベルト式無段変速機を提供する。
【解決手段】坂道検出部65は、ブレーキがOFFとなった後、最初に車速が検出されるまでの判定時間Δt1にもとづいて補正後判定時間P(t)を算出し、該補正後判定時間P(t)が坂道判定基準値Y(t)以下である場合に車両が坂道にいるものと判定する。これにより、車速が検出された時点で即座に車両がいる位置が坂道であるかどうかを判断でき、判断結果にもとづいてプーリ圧制御部64がプライマリ圧を増圧することによってベルト滑りを確実に防止することができる。またこの判断において油圧値を参照することがないので、油圧にばらつきがあったとしても、車両のいる位置が坂道であるかどうかを正確に判断することができる。
(もっと読む)
車両の変速制御装置
【課題】例えば上り坂または下り坂等の道路勾配あるいは車両の積載荷重等に対応したギヤ段にシフトアップされる車両の変速制御装置を提供する。
【解決手段】エンジンの出力を車輪に伝達するギヤ式トランスミッションを備え、予め設定された変速マップに基づき運転状態に応じてトランスミッションのギヤ段を自動的にシフトアップする車両の変速制御装置において、エンジン回転加速度を検出するエンジン回転加速度検出手段(ステップ11)と、エンジン回転加速度に応じてシフトアップするギヤ段を変更するギヤ段変更手段(ステップ13〜16)とを備え、例えば上り坂または下り坂等の道路勾配あるいは車両の積載荷重等に対応したギヤ段にシフトアップされるようにした。
(もっと読む)
車両用駆動力制御装置
【課題】運転者の減速意図が検出されたときに車両の走行環境パラメータに基づいて、減速装置の係合・解放手段による係合または解放によって減速度を発生させる車両用駆動力制御装置において、運転者の減速意図を検出してから、実際に減速度が発生するまでの遅れを抑制することが可能な車両用駆動力制御装置を提供する。
【解決手段】車両の走行環境パラメータに基づいて減速装置を作動させる必要があると判断したときに運転者の減速意図に基づいて前記減速装置を作動させて減速度を発生させる車両用駆動力制御装置において、前記減速装置は、係合・解放手段を有し、前記減速装置が作動したときに前記係合・解放手段の係合または解放によって減速度を発生させるものであり、前記減速装置を作動させる必要があると判断したときに、前記係合・解放手段を、前記減速装置が実質的に作動する直前の待機状態に移行させる動作を行う。
(もっと読む)
自動変速機の制御装置
【課題】路面の勾配状況に関わらずニュートラル制御を確実に実行し、燃費向上を達成する自動変速機の制御装置を提供する。
【解決手段】ニュートラル制御の実行を許可するブレーキ圧のしきい値P(S)が、路面勾配の傾斜度Gと予め記憶されたマップとに基づいて設定される。マップには、しきい値P(S)が、登坂路であって傾斜度Gが大きいほど小さくなるように、かつ車両後方に働く重力加速度による力よりも大きなブレーキ力を発生させるブレーキ圧になるように、記憶される。
(もっと読む)
車両用駆動力制御装置
【課題】運転者が自動変速力の介入自体を嫌う傾向にある状況においては、自動減速力の介入をなるべく避けることが可能となる車両用駆動力制御装置を提供する。
【解決手段】車両の走行環境パラメータに基づいて現在の変速段よりも低速段側の変速段への変速を実行すべきか否かを判断する手段(S50)と、運転者の減速意図が検出されたことをトリガー条件として前記低速段側の変速段への変速を実行する手段(S60)と、運転者の運転指向を検出する手段(S30)とを備え、前記運転者の運転指向がスポーツ走行指向である場合(S30−N)と、前記スポーツ走行指向ではない場合(S30−Y)とでは、前記トリガー条件である前記運転者の減速意図が異なるものに設定される。
(もっと読む)
車輌の変速制御装置
【課題】エンジン出力トルクに基づき算出される平坦路を基準とする基準加速度と、車速に基づき算出される実加速度とを比較して、道路勾配を判定して自動変速機の変速パターンを変更するものにおいて、アクセル操作により、基準加速度が変化するため、上記道路勾配判定を中断するが、ディレイが、なまし処理により遅れてディレイタイマ時間が長くなる。
【解決手段】アクセルペダルが踏込まれてスロットル開度が増加すると、基準加速度に対するなまし処理は、制御サイクル毎の前回の係数を大きくしてゲインが小さくなるように変更される。これにより、スロットル開度による基準加速度への影響が小さくなる。
(もっと読む)
121 - 140 / 182
[ Back to top ]