
Fターム[4C082AJ08]の内容
放射線治療装置 (15,937) | 放射の位置決め・確認・モニタリング (834) | 放射線の使用 (387) | X線CT (156)
Fターム[4C082AJ08]に分類される特許
141 - 156 / 156
透過断層撮影−放出断層撮影複合装置

【課題】十分に小型の構造様式において測定のために主たる構成要素を1つの断面内に配置することを可能にする。
【解決手段】本発明は、検査対象、とりわけ患者の断層撮影による断層画像を作成するために、固定のステータとステータに支持されかつ作動時に回転するロータとを有する支持構造を備え、共通のロータに少なくとも1つの放射放出装置と少なくとも1つの放射検出装置とが固定されている透過断層撮影−放出断層撮影複合装置に関する。本発明によれば、少なくとも1つの放射放出装置および少なくとも1つの放射検出装置が、放射放出要素および放射検出要素(6,8,10)と、それぞれ少なくとも1つの付属の電源要素(7,9,11)とに分割され、ロータ(5)の装備において全ての一次要素(6,8,10)が1つの回転面(14)内に配置され、全ての電源要素(7,9,11)がその回転面の外に配置されている。
(もっと読む)
放射線治療装置および放射線治療計画法

【課題】
本発明の目的は、動的追尾を行う放射線治療装置において、患部が認識できないために治療を続けられなくなった場合に、過去に照射した実績を考慮して、新規の治療計画への切り替えを実施することにより、患者に照射する放射線量を確実に把握し、過大な放射線の照射による副作用を防止する放射線治療装置を提供することである。
【解決手段】
本発明は、動的追尾照射および通常の照射に基づく2種類の治療計画をリンクさせて放射線を照射する放射線治療計画法に基づき、上記放射線治療計画による動的追尾照射および通常追尾照射のできる放射線治療装置により、治療に必要な線量を照射対象部分のみに確実に照射対象に照射する。
(もっと読む)
運動中の標的の動的追跡
運動(サイクルPの周期的運動である場合がある)を行う解剖学的領域内に位置する治療標的、例えば腫瘍又は病変部を動的に追跡する。解剖学的領域の非剛的運動及び変形について1組のCT又は他の3D画像から4D数学的モデルを構築する。4D数学的モデルは、解剖学的領域の部分の3D場所をP内における時間的位置の関数として追跡対象の標的に関連付ける。術前DRRと術中x線画像との非基準非剛体画像位置合わせ方式を用いて解剖学的領域の標的及び(又は)他の部分の絶対位置を突き止める。運動センサ、例えば表面マーカを用いてサイクルPを求める。1)非剛体画像位置合わせの結果、2)4Dモデル、3)P内における時間的位置を用いて放射線ビームを投与する。 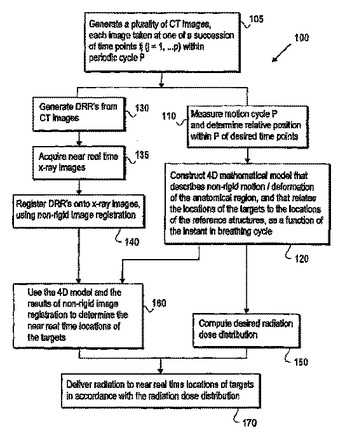 (もっと読む)
(もっと読む)
放射線検出器、超高圧放射線検出器および超高圧放射線検出器作成方法
高エネルギー放射線検出用の医療および産業アプリケーション、特に、断層治療(tomotherapy)、および他の画像誘導放射線治療システムで用いられる検知器。本検知器は、筐体に収容されているのが好ましい。複数の検知器要素が、筐体内にインストールされている。検知器要素は、基板(38)、基板の少なくとも1つの表面上に付着した読出し電極層(40)、読出し電極層の少なくとも1つの表面に付着したアモルファスセレニウム層(42)、およびアモルファスセレニウム層の少なくとも1つの表面に付着した高電圧電極層(44)を含んでいるのが好ましい。比較的簡単で、安価で、高効率な放射線検出器を提供する。 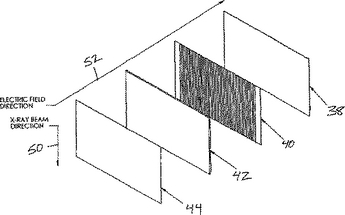 (もっと読む)
(もっと読む)
放射線治療装置およびその操作方法
【課題】 3次元図と比較して各断面図は容易に解明可能であり視覚化することができる。
【解決手段】 放射線治療装置は、治療用放射線の光源と、撮像用放射線の光源と、撮像用放射線による2次元画像の撮像装置と、撮像装置からの出力により断層撮影データを準備する演算手段と、を備え、治療用光源は断層撮影データからのフィードバックに基づいて制御可能となっており、演算手段は、撮像装置からの出力により複数の互いに交差する断面図を準備し、この断面図はポータル画像と類似するがコントラストがより良好であり断面図の細部は投影図の細部よりも細かくなっている。像のピクセルは、断面を横断して、通常は断面と直交して直線状に設けられた複数のボクセルの平均化により得られるものとなっている。オペレータに対して断面図を表示するディスプレイ手段が設けられていることが好ましい。オペレータからの指示に基づいて治療用光源を制御することができる。重ね合わせられた画像は、以前の検査または患者の治療のいずれかのものにより得ることができる。  (もっと読む)
(もっと読む)
放射線治療装置、放射線治療装置の患部追尾方法及びイメージング画像の画質向上方法
【課題】
本発明の目的は、治療放射線を確実に照射対象に照射することができる放射線照射装置および放射線治療装置における患部追尾方法およびイメージング画像の画質向上方法を提供することである。
【解決手段】
透視画像取得用の照射タイミングおよび治療用放射線の起動タイミングを制御することにより、微妙な濃淡差が確保された透視画像を取得する。これにより、治療放射線を確実に照射対象に照射して、治療時間を短縮して患者への負担軽減を図る。
また、時系列データに基づいて治療放射線照射時点での最も確からしい患部位置を予測することにより、患部に精度良く安全に放射線を照射する。
また、取得された照射対象の透視画像を特定の評価因子について基準画像と照合することにより、照射対象に対して信頼性の高い照射制御を行う。
(もっと読む)
放射線治療の処置計画の適合化
放射線治療方法において、治療対象の1枚以上の計画用画像が取得される(102)。この1枚以上の計画用画像において少なくとも悪性組織の特徴が輪郭表示され、1つ以上の当初の特徴輪郭が作成される。治療対象の1枚以上の処置用画像が取得される(114)。この1枚以上の処置用画像に基づいて前記1つ以上の当初の特徴輪郭が更新される(122)。この更新された1つ以上の特徴輪郭に基づいて放射線処置パラメータが最適化される(126)。この最適化されたパラメータを用いて治療対象の放射線処置が実行される(130)。 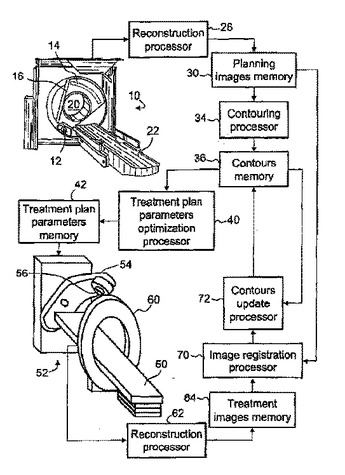 (もっと読む)
(もっと読む)
領域が競合する変形可能なメッシュ適合に基づくセグメント化
画像セグメント化方法は画像内の複数の画像特徴をセグメント化する。複数の画像特徴は同時にではなく続けてセグメント化される。各々の画像特徴をセグメント化することは、当初のメッシュを該画像特徴の境界に適合させることを含む。各々の画像特徴をセグメント化することは更に、適合されたメッシュが先に適合されたメッシュの何れかと重なることを防止することを含む。 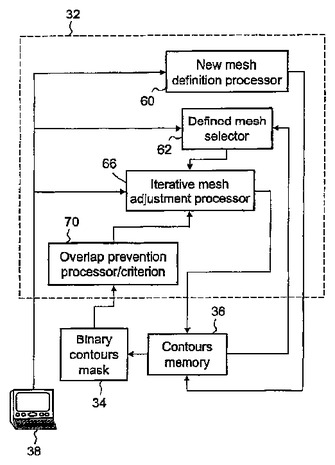 (もっと読む)
(もっと読む)
放射線治療計画装置及び放射線治療計画方法
【課題】位置決めによる誤差の影響を小さくするためのマージンを簡便に設定することができる。
【解決手段】放射線を照射する標的となる患部領域を指定し、指定された患部領域に対応する照射パラメータを設定し、患部領域の位置ずれ量を入力し、患部領域、及び患部領域の位置を入力された位置ずれ量だけずらした第2患部領域に照射した場合の線量分布を設定されたパラメータを用いてそれぞれ計算し、計算された線量分布から所定の線量以上が照射される複数の領域を抽出し、抽出された複数の領域を包含するように照射領域を設定する。
(もっと読む)
順応性腔内近接照射療法アプリケーター
本発明は、照射腫瘍学者によって操作され得る遠隔から制御される半径方向および長軸方向移動放射活性供給源管腔シールドを備えた、新規な順応性のあるCT互換性近接照射療法アプリケーターであり、近接照射療法手順のために、標的および正常組織構造への用量分与を最適化する。この近接照射療法アプリケーターは、放射活性供給源管腔、この放射活性供給源管腔にともなう少なくとも1つのシールド、および上記放射活性供給源管腔に対して少なくとも1つの方向で、上記少なくとも1つのシールドの動きを制御し得る、上記少なくとも1つのシールドに連結された機械的機構を備える。 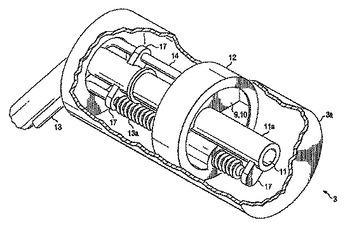 (もっと読む)
(もっと読む)
患者内のターゲットを治療するための統合放射線治療システム及び方法
【課題】治療の効率及び効力を高めるために患者評価、治療計画、シミュレーション、設定、治療、及び/又は検証の手順を統合するシステム及び方法を提供する。
【解決手段】統合放射線治療方法は、位置測定モダリティを用いて患者内に位置決めされたマーカの位置を定期的に測定することにより患者内のターゲットのパラメータに関する第1の客観的ターゲットデータを取得する段階を含む。この方法は、定期的にマーカの位置を測定することによりターゲットのパラメータに関する第2の客観的ターゲットデータを取得する段階で継続される。第1の客観的ターゲットデータは、患者を治療するための電離放射線ビームを発生させる放射線送出装置を収容する第2のエリアから離れた第1のエリアで取得することができる。位置測定モダリティは、第1及び第2のエリアの両方で同じとすることができる。他の実施形態では、第1の客観的ターゲットデータは、マーカを識別するために第1のエネルギタイプを使用する第1の位置測定モダリティを用いて取得することができ、第2の客観的ターゲットデータは、マーカを識別するために第1のエネルギタイプとは異なる第2のエネルギタイプを使用する第2の位置測定モダリティを用いて取得することができる。
(もっと読む)
患者位置決めアセンブリ
【課題】支持装置の位置及び配向を必要に応じて調整することができるような、支持装置の動作を制御する動的動作制御機構を含む患者位置決めアセンブリを提供する。
【解決手段】治療的放射線処置のためのロボット患者位置決めアセンブリは、処置中に患者を移動しかつ支持するためのロボット位置決め装置と、該ロボット位置決め装置の位置を検出するためのセンサ・システムと、及び該ロボット位置決め装置の位置データを受信するために該センサ・システムに動可可能に接続されかつ該ロボット位置決め装置の動作を制御するために該ロボット位置決め装置に動作可能に接続された制御装置とを含む。制御装置は、ように、該ロボット位置決め装置に装着された患者内の処置標的がs治療的放射線処置システムの放射線源と適切に位置合わせされるように、該センサ・システムから受信した該ロボット位置決め装置の位置を表す情報に応じて該ロボット位置決め装置の動作を制御するように構成されている。
(もっと読む)
外部ビーム照射療法用の治療計画の全体的最適化のためのシステム及び方法
外部ビーム照射ユニットを使用して、処方された照射線量を予め定められた患者内の目標体積に伝達するための、最適な治療計画を提供するためのシステム及び方法が提供される。一つのそのような方法は、(1)処方された照射線量、予め定められた目標体積及び外部ビーム伝達ユニットに関連付けられたパラメータに関連した情報を受け取ることと、(2)全体的システムを定義する前記情報に対応する複数の変数に基づいて治療計画最適化モデルを開発することと、(3)前記治療計画最適化モデルと前記情報に基づいて最適な治療計画を出力することを含む。 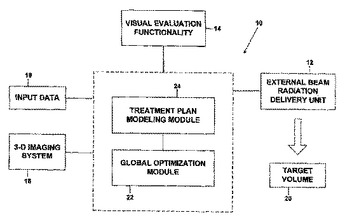 (もっと読む)
(もっと読む)
生体内マーカを使ったターゲットの位置特定
本発明は、生体内マーカの画像化のための方法及び装置に関係するものである。一実施形態では、本方法は、第一の画像化様式で、体内に常駐する複数のマーカを画像化することを含むことができる。本方法はまた、第一のビームアイソセンタに対する、その複数のマーカの第一の座標を特定することも含むであろう。本方法はまた、第二の画像化様式で、その複数のマーカを画像化すること、及び第二のビームアイソセンタに対する、その複数のマーカの第二の座標を特定することも含むであろう。 (もっと読む)
データを処理するシステムおよび方法
【解決手段】放射線処理においてデータを処理する方法は、操作データを得る工程、および操作データを画像データのセットのフォーマットに合わせる工程を含み、操作データは、ガントレー角度、患者の位置、患者の向き、放射線量率、放射線量割合、ビームパルス繰返し数、ビームエネルギー、ビームの始動時間、ビームの停止時間、および必要であれば画像の読み取りの間のビームの変動のひとつまたはこれらの組み合わせである。機械の軸線の情報、機械の状態の情報、たとえばRPMシステムのような他のシステムからの操作データが含まれてもよい。放射線処置においてデータを処理する方法が、操作データを得る工程、画像データを得る工程、および操作データと画像データとを実質的にリアルタイムで組み合わせる工程を含む。 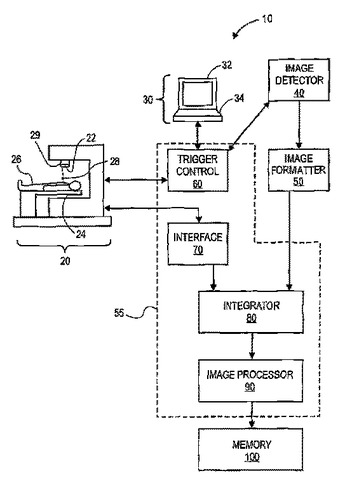 (もっと読む)
(もっと読む)
医療処置をゲーティングするための装置及び方法
【解決手段】医療処置の生理的同期を実行する方法は、標的領域の少なくとも第1及び第2画像を有する画像のシーケンスを取得する工程と、第1及び第2画像に基づいて第1の合成画像を決定する工程と、合成画像に基づいて医療処置をゲーティングする工程とを含む。医療処置を実行する方法は、各々がひとつの画像及び治療データを有する複数のテンプレートを与える工程と、入力画像を取得する工程と、入力画像をひとつのテンプレートに記録する工程と、入力画像が記録されたひとつのテンプレートの治療データに基づいて医療処置を実行する工程とを含む。 (もっと読む)
141 - 156 / 156
[ Back to top ]