
Fターム[4C082AJ13]の内容
放射線治療装置 (15,937) | 放射の位置決め・確認・モニタリング (834) | その他の画像の使用 (148)
Fターム[4C082AJ13]の下位に属するFターム
MRIの使用 (68)
Fターム[4C082AJ13]に分類される特許
41 - 60 / 80
病変部位の解像および確認のための方法と装置

【課題】放射線治療のプランニングを目的とした病変または器官の解像、位置測定および治療位置の確認のための方法と装置を提供する。
【解決手段】位置感知システムの使用を通じて診断映像システムの座標空間に関する超音波映像の位置測定を確保するために、超音波映像システムと診断映像システムの組合せを使用する。本方法は、位置測定超音波映像内の病変の位置と患者が治療ユニットの処置台に横たわっている間に撮られる超音波映像内の病変の位置を比較し、病変をその対象治療位置に配置するための正しい方策を示唆し、かつ有資格者から得られる確認による補正を実行する。
(もっと読む)
医療用画像処理システム

【課題】放射線治療の効果のより正確な診断に貢献することができる医療用画像処理システムを提供する。
【解決手段】医療用画像処理システムの演算処理装置は、以下の処理を実行する。放射線治療開始前のPET画像情報及びX線CT画像情報、及び放射線治療終了後のPET画像情報及びX線CT画像情報を入力する。次に、各画像情報における各注目領域が三次元の注目領域の画像情報に変換される。注目領域の情報は入力装置から演算処理装置に入力される。放射線治療前及びその終了後の各X線CT画像情報における各注目領域毎の重量が算出される。各X線CT画像情報間での注目領域の重量の変化量が求められる。放射線治療前及びその終了後の各PET画像情報における各注目領域毎の代謝量を算出する。各PET画像情報間での注目領域の代謝量の変化量を求める。そして、代謝量の変化量に対する重量の変化量の比が求められる。
(もっと読む)
医療装置
【課題】 照射線出射部などを長期間に亘り高位置精度で回転させることができる医療装置を提供する。
【解決手段】 中心軸線を略水平方向に位置させた状態で立設された支持フレーム12と、支持フレーム12の両側面のそれぞれに設けられた円形軌道体72と、円形軌道体72上を摺動するスライド部70を介して支持フレーム12に対して相対的に回動する走行ガントリと、走行ガントリを回動させる回動駆動装置とを備えるとともに、走行ガントリは、支持フレーム12の両側面から挟み込むように配置される第1側部59aおよび第2側部59bと、第1側部59aと第2側部59bとを連結する連結部66とからなるラーメン構造によって構成される。
(もっと読む)
放射線治療計画装置及び放射線治療計画の提供方法
【課題】
がん患部において、処方された線量より線量が高い領域/処方された線量より線量が低い領域や、危険臓器や正常組織において、予期せず線量が高くなってしまった領域(ホットスポット)/線量が低くなってしまった領域(コールドスポット)の有無を容易に特定することができる放射線治療計画装置を提供することを課題とする。
【解決手段】
被験者の体内線量分布を求める線量分布計算手段と、線量分布計算手段により求めた体内線量分布に基づいて、被験者の関心領域に関する線量体積ヒストグラムを作成する線量体積ヒストグラム作成手段と、線量体積ヒストグラム作成手段により作成された線量体積ヒストグラムと、表示すべき被験者の線量分布の線量値の範囲を指定するための線量値指定手段とを同時に表示する表示手段とを備えた放射線治療計画装置。
(もっと読む)
放射線治療システム
【課題】放射線の線量をより高精度に制御すること。
【解決手段】高周波源5から加速管64に高周波を伝送する導波路の一部を変形する自由導波管74、75、86、87と、導波路のうちの加速管64と自由導波管74、75、86、87との間に介設される非可逆回路素子77とを備えている。加速管64は、高周波を用いて治療用放射線23を生成するための荷電粒子57を加速する。本発明による放射線治療システム1は、非可逆回路素子77が導波路を高周波源5から加速管64に向かって進行する高周波進行分に比較して導波路を加速管64から高周波源5に向かって進行する高周波反射分を減衰させるときに、その高周波の打ち消しあいおよび波形歪みの発生を防止し、その伝送効率の変動を低減させることができ、治療用放射線23の線量をより高精度に制御することができる。
(もっと読む)
放射線治療装置
【課題】放射線治療装置において、治療精度を向上すると共に、患者の放射線被爆量を抑える。
【解決手段】放射線治療装置10は、治療用放射線を照射する照射ノズル12と、患者13を乗せて照射ノズル12から照射される治療用放射線15の照射位置にその患者13の患部を位置決めする治療台14と、診断用放射線を照射して患部周辺を撮影する画像取得装置18と、患者の体表面を撮影するテレビカメラ22と、画像取得装置18により撮影した透視画像とテレビカメラ22により経時的に撮影したカメラ画像とを用いて、患部を含んだ患部周辺の合成透視画像を経時的に作成する画像処理装置と、画像処理装置で作成した合成透視画像を表示するディスプレイとを備える。
(もっと読む)
オンラインIMRT検証の方法および装置
本発明は、標的への放射線治療のデリバリー中、放射線治療装置のエラーを監視および/またはシグナリングする方法に関し、前記放射線治療装置は、ビーム形成装置(MLC)を用いる所定の放射線治療に対して構成される。前記方法は、前記放射線治療の測定される検出器応答(70)を供給し、前記ビーム形成装置と前記標的との間に放射線透過アレイ検出器(T2D)を設けるステップと、前記放射線治療の連続回数に対して予測される検出器応答(60)を決定するステップと、前記放射線治療の対応する連続回数に対して放射線ビームによって生じる、前記測定される検出器応答(70)を測定するステップと、前記測定された検出器応答(70)と前記対応する予測された検出器応答(60)との間で比較を行うステップ(S300)と、前記比較で所定の閾値を越える差が得られた場合、短い応答時間でエラーをシグナリングするステップ(S400)とを具備する。 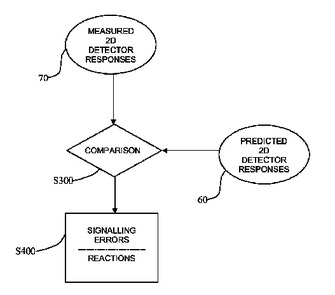 (もっと読む)
(もっと読む)
患者モニタ
患者の動きまたは異常な呼吸を検出する患者モニタが開示される。患者(20)の画像が立体視カメラ(10)によって取得される。それらの画像は次いで3D位置決定モジュール(25)によって処理される。3D位置決定モジュールは、患者の少なくとも一部分の諸位置を示す諸測定値を決定する。得られた測定値は次いでモデル生成モジュール(32)に渡される。モデル生成モジュールは、呼吸サイクルの間の患者の前記少なくとも一部分の位置の変動の呼吸モデルを生成する。その後は、異常な呼吸または患者の動きは、立体視カメラ(10)によって得られるさらなる画像を処理して患者の少なくとも一部分の位置を示すさらなる諸測定値を決定することによって検出できる。その際、これらの測定値は、比較モジュール(36)によって、記憶されている呼吸モデル(34)と比較される。異常な呼吸または患者の動きが検出されると、比較モジュール(36)は信号を治療装置(16)に送って正常な呼吸が再開されるまで治療を中断させるか、あるいは信号を機械的な台(18)に送って検出された動きに対処するよう患者の位置を直させる。 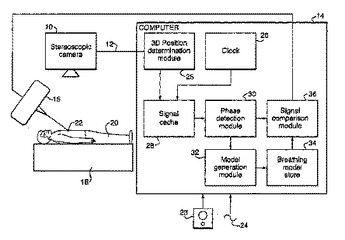 (もっと読む)
(もっと読む)
柔軟な針の制御された操作
【課題】軟らかい組織への挿入中の柔軟な針を、該針の位置を明らかにする画像を用いて閉ループ操作する、コンピューター制御された新規のロボットシステムと、これを用いる方法とを提供すること。
【解決手段】軟らかい組織への挿入中の柔軟な針を操作するロボットシステムは、前記針の位置を明らかにする画像を用いる。途中で危険な障害物を避けつつ所望の目標位置に到達する、前記針の先端部の軌道を制御装置が計算する。逆運動学のアルゴリズムを用いて、前記先端部を前記軌道に従わせるために前記針の基部に必要とされる動きが計算され、ロボットが、制御された前記針の挿入を行う。柔軟な針の変形可能な組織への挿入は、仮想バネにより支持された線形の梁としてモデル化され、前記仮想バネの弾性係数は前記針に沿って変化する。前記針の順運動学及び逆運動学が解析的に解かれ、リアルタイムの経路計画及び修正が可能となる。X線透視画像において行われる画像処理により前記針の形状が検出される。検出された前記針の形状から前記組織の剛性が計算される。
(もっと読む)
3次元医用画像の描画
3次元医用画像で関心ボリューム構造を描画する方法及び装置。この装置は、3次元画像を格納するためのデータ記憶デバイス、及び3次元画像の関心ボリューム構造を描画するためのディジタル処理デバイスを含む。 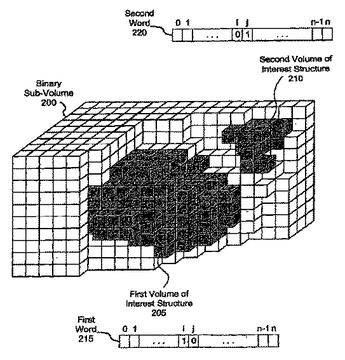 (もっと読む)
(もっと読む)
放射線照射対象部位の位置決め装置および位置決め方法
【課題】放射線照射対象部位の位置決めを3次画像を用いて的確に行う。
【解決手段】患者などの放射線照射対象部位についての3次元参照画像を入力する参照CT画像入力部102と、前記3次元参照画像から位置姿勢情報に基づいて擬似透視画像を生成する擬似透視画像生成部106と、位置決めされる放射線照射対象部位についての照合透視画像を入力する照合X線透視画像入力部104とを備え、前記擬似透視画像と前記照合透視画像との相関値が所定の値を超えた時の位置姿勢と前記3次元参照画像撮像時の位置姿勢の変化量を放射線照射対象部位の並進量と回転量として、前記放射線照射対象部位を位置決めする最適化計算部110を含む位置決め手段を設けた。
(もっと読む)
トモシンセシス技術を用いた患者の位置決め
対象物の位置を決定するためのシステムは、X線源および撮像子を有する撮像システムと、該撮像システムを用いて対象物のトモシンセシス画像を取得し該トモシンセシス画像を用いて対象物の位置を決定するように構成されたプロセッサとを有する。対象物の位置を決定するための方法は、対象物のトモシンセシス画像を取得するステップと、該トモシンセシス画像を用いて放射線機器に対する対象物の座標を決定するステップとを有する。対象物の位置を決定する方法は、対象物の画像を取得するステップと、該対象物の基準画像を取得するステップと、該基準画像を該画像と比較するステップと、少なくとも部分的にその比較結果に基づいて、該対象物の座標を決定するステップとを有し、該基準画像は、該画像の平面に平行な平面を有する。 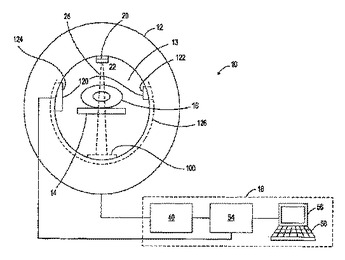 (もっと読む)
(もっと読む)
複数のコリメータの自動選択
複数の治療ノードのそれぞれにおけるビーム・パラメータを自動的に決定するためのシステム及び方法が開示される。ビーム・パラメータは、ビーム形状、ビーム寸法及び/又はビーム配向を含んでよい。また、放射線治療システムにおいて複数のコリメータを自動的に選択するためのシステム及び方法が開示される。 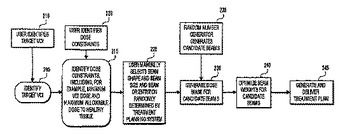 (もっと読む)
(もっと読む)
放射線治療装置及び放射線照射方法
【課題】治療計画情報の絞り開度に対応した照射野と実際の照射野とを一致させた放射線照射を確実に実施して安全性を向上すること。
【解決手段】医用ライナック本体4から照射され、絞り装置5を通過した放射線をFPD6により撮影し、この放射線の照射野を撮影した画像データに基づいて実際の放射線の照射野を求め、この照射野と治療計画情報に含む照射野とを照合し、この照合結果に基づいて医用ライナック本体4による放射線治療を実施又は中断する。
(もっと読む)
改良型の放射線治療計画手順
改良型の放射線治療計画手順が提案される。この手順は、特定の細胞変質を示すマーカーが検出及び定量化される生体外検査によって、細胞変質の絶対的な程度を特定及び決定するステップと、相対的な細胞変質の同様程度を有する領域の生物学ベースのセグメンテーションを確立するステップと、細胞変質の絶対的な程度を、生物学ベースのセグメンテーションデータに適用して、改良型の放射線治療計画手順を確立するステップとを備える。さらには、本発明は、改良型の放射線治療計画手順のためのシステム、及び癌の診断及び/又は治療管理の手順でのその使用を提案する。 (もっと読む)
心臓かん流造影のためのルビジウムジェネレータならびにその構成および維持する方法
82Sr/82Rbジェネレータカラムは、容器を流体密封状態で閉じるためのカバーを有し、容器内に流体を送達するための導管の接続用の注入口と、容器から流体を伝導するための導管の接続用の排出口とをさらに有する、流体不浸透性円筒容器を使用して作られる。イオン交換材料は該容器を満たし、イオン交換材料が1平方インチにつき1.5ポンドの流体圧力(10kPa)で少なくとも5ml/分の速度で溶出することを可能にする密度まで容器内に圧縮される。ジェネレータカラムは、82Srを繰り返し再充填することが可能である。ジェネレータカラムは、3次元または2次元いずれかのポジトロン放出断層撮影システムと適合する。 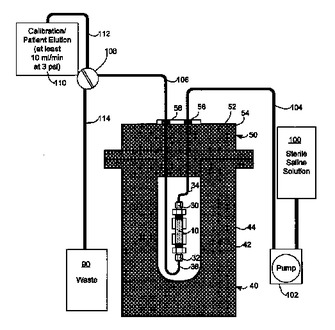 (もっと読む)
(もっと読む)
撮像装置及び撮像システム
【課題】より正確にSN検出が可能な撮像システム及びそれに用いられる撮像装置を提供すること。
【解決手段】ガンマ検出器101及び該ガンマ検出器に配置されるコリメータ102を有するガンマカメラ1、該ガンマカメラに固定され、光検出器を有する光学カメラ2、ガンマカメラに固定されるレーザー装置3と、を有する撮像装置と、ガンマ線検出器からの信号に基づきガンマ画像データを取得するガンマ画像データ取得部401、光検出器からの信号に基づき光学画像データを取得する光学画像データ取得部403、ガンマ画像データに基づいて射影変換を行い射影変換後ガンマ画像データを作成する射影変換部406、光学画像データと射影変換ガンマ画像データを合成して合成画像データを作成する合成画像データ作成部407、を有する処理装置と、合成画像データを表示する表示装置5と、を有する撮像システムとする。
(もっと読む)
病変部位の解像および確認のための方法と装置
【課題】放射線治療のプランニングを目的とした病変または器官の解像、位置測定および治療位置の確認と修正のための方法と装置を提供する。
【解決手段】位置感知システムの使用を通じて診断映像システムの座標空間に関する超音波映像の位置測定を確保するために、超音波映像システム008とMRI,CTまたはPETを含むグループから選択される診断映像システム002の組合せを使用する。位置測定超音波映像内の病変の位置010と患者が治療ユニットの処置台に横たわっている間に撮られる超音波映像内の病変の位置を比較し、病変をその対象治療位置に配置するための正しい方策を示唆し、かつ有資格者から得られる確認による補正を実行する。
(もっと読む)
仮想画像を使用した患者トラッキング
仮想画像を使用して患者をトラッキングする装置及び方法。  (もっと読む)
(もっと読む)
動物体の事前選択された解剖学的部分に対して放射線治療を行う装置と方法
【課題】安全で効果的な治療と治療過誤の危険を減じ、患者の不快感を最小化する放射線治療を提供する。
【解決手段】1箇所以上の計画位置に挿入されるn本の中空治療経路からなる一群と、mを2以上、nを1以上として、n本の中空治療経路群のうち対応するm本に接続されるm本の送出経路36a,36bからなる一群と、m本の送出経路36a,36bのどれがn本の中空治療経路のどれに接続しているかを同定する同定手段とを有する。同定手段は追跡経路に収容された追跡要素と、エネルギー放出源を対応するソース経路33a,33bに保管するための保管手段と、エネルギー放出源をそれぞれのソース経路から相互接続された送出経路36a,36bと治療経路10のうちの対応する1本を経由して計画位置の1つに向かって一時的に挿入するための送出手段と、m本の送出経路の少なくとも1本を中空治療経路の対応する1本に連結するための連結手段とを備える。
(もっと読む)
41 - 60 / 80
[ Back to top ]