
Fターム[4C082AL02]の内容
Fターム[4C082AL02]に分類される特許
1 - 20 / 23
インナーガントリー
【課題】本発明は、粒子ビーム治療システムと共に使用するためのインナーガントリーに関する。
【解決手段】本システムは、患者サポートと、アウターガントリーであって、患者サポート上の患者の周囲の、ある範囲のポジションを通って加速器が移動することを可能とするよう、加速器が搭載されるアウターガントリーとを含む。加速器は、患者内のターゲットに達するのに十分なエネルギーレベルを有する陽子あるいはイオンビームを発生させるよう構成されている。インナーガントリーは、ターゲットに向かって陽子あるいはイオンビームを導くための開口部を具備してなる。
(もっと読む)
患者位置設定装置、患者台、搬送装置、粒子線治療装置及び患者位置設定方法

【課題】治療室にて短時間に患者の位置設定を行うことができる患者位置設定装置を得ることを目的とする。
【解決手段】着脱自在な天板5と、天板5を駆動する第1の駆動装置9b及び第2の駆動装置9aと、天板5を搬送する搬送装置20を備え、第1の駆動装置9b及び第2の駆動装置9aは、それぞれの天板支持部3に天板5との位置関係を決定する位置決め部13を有し、搬送装置20は、位置決め部13を用いて所定の位置に天板5が設置された第2の駆動装置9aから、位置決めされた患者15及び天板5を、第1の駆動装置9bへ搬送し、第1の駆動装置9bは、位置決め部13を用いて所定の位置に天板5及び当該天板5に固定された患者15を設置し、第2の駆動装置9aにて位置決めされた駆動装置パラメータに基づいて、第2の駆動装置9aにて位置決めされた状態に天板5及び患者15を駆動する。
(もっと読む)
駆動式患者台、駆動式患者台の制御装置、駆動式患者台制御用プログラム及びこれらを用いた粒子線治療装置
【課題】治療計画時に策定した位置に合わせる位置決め作業を効率的に行うことができる駆動式患者台を得ることを目的とする。
【解決手段】固定座標系10に対して、X軸方向、Y軸方向、Z軸方向の各軸方向に天板8を並進させる並進手段3、4、5と、X軸周りのθ方向、Y軸周りのφ方向、Z軸周りのξ方向の各方向に天板8を回転させる回転手段6、7、8と、入力された希望回転中心点P及び希望回転角に基づいて並進手段3、4、5及び回転手段6、7、8を制御する制御装置とを備え、制御装置は、並進手段3、4、5と回転手段6、7、8の基準状態aから天板8を希望回転角に回転移動させる回転駆動信号を生成する回転駆動信号生成手段と、回転移動によって生ずる希望回転中心点Pの並進移動量が所定値以下となるように並進手段3、4、5を並進させる並進駆動信号を生成する並進駆動信号生成手段とを有した。
(もっと読む)
放射線治療装置
【課題】被検体に対する放射線照射野を治療部位の形状に精度よく設定できる多分割照射絞り装置を備えた放射線治療装置を提供する。
【解決手段】実施形態の放射線治療装置は、複数のリーフ体の各軌道面に設けた歯形に噛み合わせた複数の駆動ギアを定荷重バネに結合して、定荷重バネにより各リーフ体に対して常に閉方向へ歯形車に力を作用させることで、複数の駆動ギアによるバックラッシュを防ぎ、放射線照射野の設定精度を高め、不必要な放射線照射を防止する。
(もっと読む)
放射線治療装置
【課題】ダウンタイムの危険性を低減することができる放射線治療装置を提供する。
【解決手段】被検体が移動可能に載置される寝台10と、寝台10上に載置された被検体Pの病変部に放射線を照射する放射線照射部20と、寝台10及び放射線照射部20の点検を行うための点検スケジュールを予め設定された点検項目及びこの項目の点検頻度に基づいて作成する保守管理部30とを備え、保守管理部30は、作成した点検スケジュールに従う点検により得られた点検データが予め設定された許容誤差範囲内であり、且つ前記点検データに基づく管理データが許容誤差範囲に含まれる管理範囲から外れている場合に、前記点検データに対応する点検項目の点検頻度を高くした点検スケジュールに更新する。
(もっと読む)
マルチリーフコリメータおよび放射線治療装置
【課題】 放射線治療において、リーフの検出機構が簡素化、小型化され、リーフの検出精度が向上する放射線治療装置を提供することを目的とする。
【解決手段】 位置検出機構40は、発光素子41からのレーザー光等の光を、シリンドリカルレンズ(円柱レンズ)42を通して線状の公選へと変化させて、リーフブロック27の端面全体へ照射する。リーフブロック27の端面全体へ照射されたレーザー光の反射光は、光学レンズを通してCCDやCMOS等の撮像素子43で受ける。撮像素子43の画素はリーフ幅より小さいものであり、撮像素子43上に端面位置が図4の(c)のように描出され、パターン画像を画像処理により解析して、リーフブロック27の変位、つまり絶対位置を算出する。
(もっと読む)
患者を放射線に対して位置決めするためのデバイス
本発明は、患者を放射線に対して位置決めするための多関節ロボットデバイスであって:
水平移動のための少なくとも1本の線状レールと;
前記線状レールに対して並進運動が可能であり且つ前記線状レールに対して垂直な回転軸を中心にして旋回が可能であるコネクタと;
コネクタへと接続されているロボットアームであって、患者ホルダへ接続している交差回転軸を有するリストジョイントを備えている前記ロボットアームと;
を備えている、前記デバイスに関する。 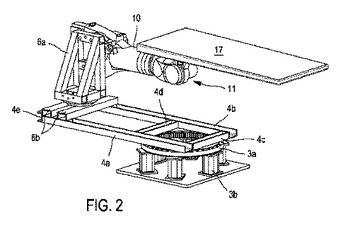 (もっと読む)
(もっと読む)
放射線治療装置用ベッド装置
【課題】
構造の簡素化および設置スペースの小型化を実現する放射線治療装置用ベッド装置を提供することにある。
【解決手段】
患者をのせる天板4と、天板4を互いに直交した3軸方向に移動させる平行移動装置と、天板4を回転させる回転移動装置8と、平行移動装置及び回転移動装置8を制御するベッド制御装置36を備え、回転移動装置8は、天板4を支持する複数の回転アーム9,10を有し、ベッド制御装置36は、回転アーム9,10の長手方向と、天板4の長手方向を平行に保って、回転アーム9を、床面と平行な平面内で上下方向であるZ軸と平行な軸のまわりに回転させることによって、上記課題を解決することができる。
(もっと読む)
治療計画のための連続的最適化
放射線治療計画のための方法および装置について記載する。本方法は、複数の放射線治療計画パラメータを受信することと、複数の放射線治療計画パラメータを連続的に最適化することとを含む。 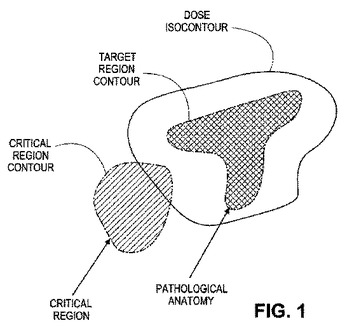 (もっと読む)
(もっと読む)
放射線治療における患者位置決め装置および患者位置決め方法
【課題】放射線治療における患者の位置決め繰り返し回数を低減し、治療時間の短縮化と患者の被爆量の低減化を図る放射線治療における患者位置決め装置および患者位置決め方法を得る。
【解決手段】患者位置決め装置は、患者が固定される治療台10と、患者のX線画像を撮像するX線撮像装置20と、患者のX線画像を取り込んで参照画像との画像照合を行い、位置ずれがある場合に治療台の移動量を演算して移動させる患者位置決め処理が実行される位置決め計算機30とを備え、患者位置決め処理は、位置決め開始前に、患者の過去の治療台位置決めデータに基づいて治療台の粗位置決め位置を学習させる粗位置決め位置学習処理と、学習させた粗位置決め位置に治療台を移動させる治療台初期移動処理とを実行する。
(もっと読む)
ジョーとガントリーとカウチの協調動作を利用した放射線療法の画像化及び送達
患者の治療区域に放射線療法治療計画を送達する方法。治療計画は、患者を支持するための可動式支持台と、支持台に対して動かすことができるガントリーとを含む放射線療法システムを使用して送達される。ガントリーは、放射線源と、或るジョー幅を有するジョーのセットと、治療計画の送達中に放射線を変調するためのマルチリーフコリメーターとを支持している。支持台は、治療区域への治療計画の送達中に動かされ、ジョーの幅は、治療区域への治療計画の送達中に動的に調節される。 (もっと読む)
昇降機構および昇降寝台並びに撮影装置
【課題】小型で昇降幅が大きい昇降機構を実現させる。
【解決手段】ベース331と、上部昇降台332と、下端がベース331に、上端が上部昇降台332にそれぞれ接続されており、上下方向に伸縮自在である伸縮構造体335と、第1のリンク333と第2のリンク334とを有し、第1のリンク333の一端333aをベース331に回動可能に結合し、第2のリンク334の一端334aを上部昇降台332に回動可能に結合し、第1のリンク333の他端333bと第2のリンク334の他端334bとを回動自在に結合してなる、くの字形のリンク機構部337と、第1のリンク333の一端333aを中心に回動させる回動駆動部336とを備える構成とする。
(もっと読む)
絞り装置及び絞り装置を用いた放射線治療装置
【課題】照射領域の照射精度の向上が可能な放射線の照射領域を調整する絞り装置を提供すること。
【解決手段】放射線治療装置のX線を照射する照射ヘッド内に設けられた絞り装置1は、一対の絞りブロック10と、線源126から絞りブロック10を通る延長上に設けられ、一対に設けられたマルチリーフコリメータ20とを備え、マルチリーフコリメータ20は、複数の板状リーフ21と、これら板状リーフ21を2箇所で板状リーフ21のY方向及びZ方向に保持可能に形成された複数のエアベアリング22と、それぞれの板状リーフ21を独立して線源126を中心に回動可能に形成された歯車機構23と、板状リーフ21を厚み方向に案内する案内部24とを有する構成とする。
(もっと読む)
患者位置決めアセンブリ
【課題】支持装置の位置及び配向を必要に応じて調整することができるような、支持装置の動作を制御する動的動作制御機構を含む患者位置決めアセンブリを提供する。
【解決手段】治療的放射線処置用のロボット患者位置決めアセンブリは、処置中に患者を移動しかつ支持するためのロボット位置決め装置と、ロボット位置決め装置の位置を検出するセンサ・システムと、ロボット位置決め装置の位置データを受信するためにセンサ・システムに動作可能に接続されかつロボット位置決め装置の動作を制御するロボット位置決め装置に動作可能に接続された制御装置を含む。制御装置は、ように、ロボット位置決め装置に装着された患者内の処置標的が治療的放射線処置システムの放射線源と適切に位置合わせされるように、センサ・システムから受信したロボット位置決め装置の位置を表す情報に応じてロボット位置決め装置の動作を制御するように構成されている。
(もっと読む)
放射線治療用患者位置決めシステム
【課題】放射線治療装置の位置決めシステムの乾酪化、小型化と、位置決め精度の向上を実現する。
【解決手段】患者支持台1の駆動機構2を、治療室床面50に設置された回転駆動部3と、該回転駆動部に保持された鉛直方向駆動部4と該鉛直方向駆動部に保持された水平方向駆動部5によって構成するとともに、第1X線撮像装置10Aの受像装置11を支持部材13によって回転駆動部3に支持する。また、第1X線撮像装置10Aを回転駆動部3の回転軸20上に同軸的に配置し、鉛直方向駆動部4を回転駆動部3の回転軸20を横切る位置に配置し、かつ患者支持台1を、回転軸20をはさんで対抗した位置にある水平駆動部5及び該鉛直方向駆動部の支持部4aによって保持する。
(もっと読む)
昇降装置およびその制御方法、並びに撮影装置
【課題】流体制御による昇降装置において、下降動作時の衝撃を抑えつつ低コストを実現する。
【解決手段】ポンプ253とシリンダ231とが流路で接続されるとともに、シリンダ231とリザーバ254とが流体を一定流量で流す定流量弁258を介して流路で接続される。ポンプ・弁制御部260は、テーブル部101の下降動作を行う際に、ポンプ253による流体の吐出流量と定流量弁258を流れてリザーバ254に戻る流体の流量とを平衡させ、その後、ポンプ253による流体の吐出流量を上記一定流量より小さくしてシリンダ231に収容される流体の量を小さくする。高価な比例制御弁は使用しない。
(もっと読む)
粒子放射線で増強された治療を供給するシステム及び方法
標的組織の遠位の健常組織での作用を低減しつつ、標的での作用を優先させる、剤204の選択的標的化を増強するシステム及び方法。1つ又は複数の剤204が、標的組織への送達のために、ナノスケールの構造体/粒子202と組み合わされ得る。陽子放射線等の加速粒子放射線での適当な衝撃が、標的部位での剤204の放出を誘発する。ナノ担体が、治療剤及び/又は画像化増強剤204と組み合わされ得る。標的組織の画像化が、送達された粒子放射線の線量の検証を提供し得る。ナノ担体には、体内環境での生体適合性及び耐久性に関して選択されると共に、処理環境におけるフィードバックメカニズムを提供することにより剤204の放出を加速し、且つ放出のために必要とされる総放射線線量を低減するようにさらに選択される、外側のシェルが設けられ得る。 (もっと読む)
照射治療装置と方法
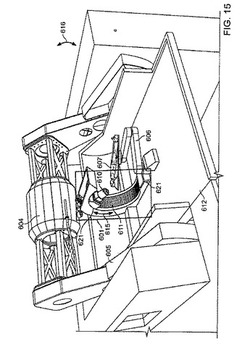
【解決手段】 本開示は、一般に垂直な患者支持面と、患者を患者支持面と固定された関係に確保するように配置された患者固定メカニズムと、患者支持面の一端に固定され患者支持面を一般に垂直な軸の回りに回転させ選択的に患者支持面を一般に垂直な軸に直交する面に対して少なくとも部分的に平行移動するように配置された回転プラットフォームと、撮影装置が固定ビーム照射源からの照射を遮断する第一のモードと撮影装置が固定ビーム照射源からの照射を可能にする第二のモードを示す撮影装置と、患者支持面と連通され、患者支持面を一般に垂直な軸に沿って搭載位置から照射位置まで平行移動するように配置された垂直平行移動メカニズムとを、有する照射治療装置を提供する。 (もっと読む)
テーブル駆動システム
【課題】患者配置システム用の単純及びコンパクトで信頼性、実用性及び費用効率の高い駆動システムを提供する。
【解決手段】支持テーブルを第一の方向に移動させるように構成されている第一の駆動アセンブリ(805)と、支持テーブルを第二の方向に移動させるように構成されている第二の駆動アセンブリ(810)と、第一の駆動アセンブリ(805)及び第二の駆動アセンブリ(810)に結合されている駆動モータ(815)とを含むテーブル駆動システム(800)を提供する。駆動モータ(815)は、第一の駆動アセンブリ(805)及び前記第二の駆動アセンブリ(810)を駆動するように構成される。
(もっと読む)
温熱治療システム
【課題】単に被治療者が湯に浸かるだけでは得られないより高い治療効果を期待することができるとともに、被治療者に負担のかからない温熱治療システムを提供すること。
【解決手段】治療槽2と、治療用溶液を、温度調整回路装置で所定の温度にする給湯管を介して上記治療槽に注入する循環機構3と、被治療者を載置するキャリア25と、該キャリア25を上記治療槽2の内と外とに交互に移動させる被治療者の搬送機構4とを備え、キャリア25は、必要に応じて脱着可能であり、単独にて移動可能としたことを特徴とする。
(もっと読む)
1 - 20 / 23
[ Back to top ]