
Fターム[4C100AD11]の内容
Fターム[4C100AD11]の下位に属するFターム
Fターム[4C100AD11]に分類される特許
41 - 60 / 136
マッサージ機
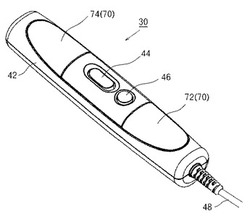
【課題】 被施療者の心拍や皮膚抵抗を、一つの検出体でリラックスした状態で正確に測定でき、ストレスや凝りの状態に応じたマッサージを可能にする。
【解決手段】 生体情報検出手段30は、皮膚抵抗を測定する皮膚抵抗検出部60と、心拍を測定する心拍検出部70を有し、皮膚抵抗検出部と心拍検出部は、被施療者が両手でその左右両端部を掴持することのできる棒状の検出体42に配備されており、検出体42の一端側に皮膚抵抗検出部として第1の電極62、心拍検出部として第2の電極72及びグランド用の第3の電極80が配置され、他端側に心拍検出部として第4の電極74が配置される。検出体の左右両端部を左右の手で掴むことにより、心拍と、皮膚抵抗がリラックスした状態で正確に測定でき、これら測定値から、ストレス度合いや凝り度合いを判定し、マッサージ手段を制御する。
(もっと読む)
筋硬度計

【課題】 筋硬度の計測精度を向上した筋硬度計を提供する。
【解決手段】 本発明の筋硬度計1は、人体を押圧する接触子2と、接触子2を人体に押込み押圧動作を行わせる押込駆動部3と、少なくとも一つ以上の上記押込み方向と直交する方向に接触子2を移動させる第2の駆動部と、上記接触子2に作用する力を検出する力検出部5と、力検出部5の検出結果から筋硬度の指標を算出する算出部と、を備えている。そして、上記力検出部5は各駆動部の駆動時に接触子2の動作方向に作用する力を夫々検出するものである。更に、上記算出部が少なくとも押込み方向と、押込み方向に直交する方向の二方向から夫々検出された力を用いて筋硬度の指標を算出するものである。これにより、筋硬度が少なくとも二方向からの検出結果から計測されるため、算出される筋硬度の指標から個体差による影響を除くことができ、筋硬度の計測精度を向上することができる。
(もっと読む)
マッサージ機
【課題】 生産費用及び重量を削減したマッサージ機を提供する。
【解決手段】 本発明のマッサージ機1は、座部13と、施療部を備えた背もたれ部12と、座部13を支持する箱形状のベースフレーム3と、背もたれ部12を支持する背もたれフレーム2と、を備えたものである。そして、背もたれフレーム2がベースフレーム3に取り付けてある。更に、背もたれフレーム2の一部がベースフレーム3の箱内部に臨んでおり、背もたれフレーム2のベースフレーム3に臨んだ上記部位がベースフレーム3の構造部材の一部を兼ねている。これにより、マッサージ機1の構造部材の全体数を減らすことができ、生産費用及び重量を削減することができる。
(もっと読む)
マッサージ装置及びマッサージ方法
【課題】施療子の位置を適切に維持することができるとともに、小型化が可能であり、製造コストを低く抑えることができるマッサージ装置を提供する。
【解決手段】マッサージ装置1は、マッサージ動作を行うとともに移動可能に構成された施療子41と、前記施療子41にマッサージ動作させ、あるいは前記施療子41を移動させる複数のモータ26〜28と、前記施療子41のマッサージ動作中に、該マッサージ動作をさせるモータ27とは異なる停止中のモータ26が作動した場合に、前記停止中のモータ26の動作を元に戻すように制御することにより前記施療子の位置調整を行う制御手段30と、を備えたことを特徴とする。
(もっと読む)
マッサージ機
【課題】 多様なマッサージ強さ調整を行うことができるものとする。
【解決手段】 人体に接触する施療子を備えて施療子の人体側への突出量を変化させて人体に対するマッサージ動作を行うとともにマッサージの強さを可変としているものにおいて、マッサージの強さの調整用の操作部を少なくとも二つ備え、各操作部によって個別に設定される強さ設定の組み合わせに応じて施療子の動作を制御する制御部を備える。複数の強さ調整用操作部の操作の組み合わせで最終的なマッサージ強さが決定される。
(もっと読む)
自走式背部マッサージ機構
【課題】自走式背部マッサージ機構を提供する。
【解決手段】背凭れフレームとマッサージ本体から構成され、背凭れフレームの両側辺にそれぞれ湾曲した湾曲レールが延び、二つの湾曲レールの外側辺の上下端にそれぞれ結合端が設けられ、結合端は湾曲レールに平行する端面に結合孔が貫設され、その上下端の結合孔に湾曲した押さえシートが螺着され、マッサージ本体は中央に駆動部材が設けられ、駆動部材の側辺に駆動端と受動端があり、その被動端と受動端の側辺に被動棒と受動棒が貫設され、被動棒の両側辺に偏心にマッサージ部品が設けられ、また、被動棒と受動棒の両側辺において適当な位置、駆動輪と案内輪が嵌設され、マッサージ本体は両側にある駆動輪で背凭れフレームの湾曲レール上で変位作動し、また、押さえシートにより、マッサージ本体が背凭れフレームへ向って押さえられ、駆動輪がより緊密に湾曲レールに密着する。
(もっと読む)
マッサージ機
【課題】コストアップを招くことなく肩位置判別機能を備えたものとする
【解決手段】マッサージ用の施療子の上下位置を変更する上下位置変更手段と、施療子のマッサージ動作における上下方向動作の制御のためのセンサとを備えたマッサージ機であり、施療子の上下位置変更時に上記センサ出力から被施療者の肩位置の上下方向位置を判別する判別手段を備える。マッサージ動作のために設けた上下方向動作の制御のためのセンサの出力から肩位置を判別する。
(もっと読む)
マッサージ機
【課題】使用者の体格を問わずに使用することができる上に全高を低く抑えることができるものとする。
【解決手段】マッサージ機構14を背もたれ1内に配した椅子型のマッサージ機である。背もたれ1は腰サポート部分が湾曲して背もたれ1前面と座部2の上面とが曲線で連続する形状となっている。座部と背もたれの境界がなく、使用者の着座位置がずれても背もたれに背を預けた時、背もたれ前面に背から腰にかけてを密着させることができる。
(もっと読む)
椅子型マッサージ機
【課題】非使用時には、背凭れ部の側部又は後部までスライドさせることのできる腕用マッサージユニットを搭載した椅子型マッサージ機を提供する。
【解決手段】被施療者の腰掛ける座部20と、座部の後端に配備され、被施療者が凭れる背凭れ部30と、座部の左右から背凭れ部の側部まで延びて配備され、被施療者の肘を置く肘掛け部50と、肘掛け部上に配備され、被施療者の前腕にマッサージを施す腕用マッサージユニット60と、を有する椅子型マッサージ機において、肘掛け部には、肘掛け部に沿って配備され、後端が背凭れ部の側部又は後部まで延びるスライド機構70を有しており、腕用マッサージユニットは、スライド機構にスライド可能に配備されたスライド部材76に搭載され、腕用マッサージユニットは、肘掛け部に対して、背凭れ部の側部又は後部まで後退可能とした。
(もっと読む)
マッサージ装置
【課題】 下肢に対して多様なマッサージ動作を広範囲に行うマッサージ性の向上したマッサージ装置を提供する。
【解決手段】 マッサージ装置1は、下肢の側部を両側から挟持して施療する対をなす施療子5、5を有する下肢用施療手段2と、前記下肢用施療手段2を下肢に沿って移動させる移動手段10と、を備えたものである。そして、前記下肢用施療手段2の動作と、前記移動手段10による前記下肢用施療手段2の移動と、を組み合わせて行う制御手段が設けてある。更に、下肢用施療手段2の施療動作と、移動手段10によう下肢用施療手段2の移動と、を組み合わせることで、多様なマッサージ動作を広範囲に行うことを可能とした。
(もっと読む)
椅子型マッサージ機
【課題】大腿部の背面側を伸長するストレッチを行うことができる椅子型マッサージ機を提供する。
【解決手段】被施療者が着座する座部1と、該座部1に着座した被施療者の上半身を後方から支持しつつリクライニング動作可能に設けられた背凭れ部3と、該座部1の前部に上下回動可能に設けられた脚載部2と、該背凭れ部3をリクライニング動作させるアクチュエータ40と、該背凭れ部3内に設けられて昇降動作及び前後動作可能であり、被施療者の上半身を後方から施療する施療機構7と、前記アクチュエータ40及び施療機構7の動作を制御する制御部6とを備えた椅子型マッサージ機である。前記制御部6は、前記脚載部2を上方に回動させた状態で、前記アクチュエータ40による背凭れ部3の起立動作に連動して前記施療機構7を上昇動作及び前進動作させ被施療者の上半身を前屈させる前屈動作を行うよう制御する。
(もっと読む)
マッサージ機
【課題】従来よりも短い時間で効果的なマッサージを施すことが出来るマッサージ機を提供する。
【解決手段】本発明に係るマッサージ機は、被施療者の生体情報を取得する生体情報取得部2と、該生体情報取得部2によって取得された生体情報に基づいてマッサージ動作を制御する制御回路3とを具え、生体情報取得部2は、被施療者のEDAを検知するEDAセンサー22を具え、制御回路3は、EDAセンサー22センサーによって検知されたEDAの時間変化量を表わすEDA判定値と、EDAに含まれるEDRの振幅値を表わすEDR判定値とに基づき、リラックス、ニュートラル、ポイントのコリ感、エリアのコリ感、及び痛いを含む複数の心理状態を推定し、その結果に応じてマッサージ動作を調整する。
(もっと読む)
小型マッサージ機
【課題】マッサージを適切な温度状況下で行う。
【解決手段】揉み、叩き、指圧の少なくとも一つのマッサージ動作を発生させるマッサージ部2と、マッサージ部2を収納した状態で据え置きを可能にするケーシング3とを有するものであって、マッサージ部2は、モータ10と、このモータ10からの駆動をマッサージ動作に変換するメカ部11と、ケーシング3の表面に配置されてメカ部11により発生される動作を行う動作体4と、動作体4がケーシング3の表面に配置された領域を覆う覆い体12とを有したものとされており、この覆い体12の裏面であって動作体4の周囲に温風又は冷風を供給する温冷風供給部が設けられている。
(もっと読む)
マッサージ機
【課題】骨盤周りのストレッチ感を向上させることができるマッサージ機を提供する。
【解決手段】背もたれ部13に備えられる左右対のエアバッグ20a,20bと、座部12に備えられる左右対のエアバッグ21a,21bとが互いに時間差を有して協調動作するように制御され、反らし、ひねり(回旋・側屈)、前傾・後傾といった使用者の骨盤周りのストレッチが行われる。
(もっと読む)
マッサージロボット及びその制御プログラム
【課題】 マッサージの対象となる部分に対して、施術者が行うマッサージに近い正確なマッサージを自動的に行うこと。
【解決手段】 マッサージロボット10は、使用者Hの顔面Fに接触する接触子17と、接触子17を保持しながら所定空間内を移動させるアーム19と、アーム19の動作を制御する制御装置15とを備えて構成されている。制御装置15は、顔面Fの所定領域内で接触子17が移動するマッサージ軌跡を作成する軌跡作成機能24と、マッサージ軌跡に沿って接触子17を移動しながら接触子17で顔面Fを押圧するマッサージ動作をさせるマッサージ動作制御機能25とを備えている。軌跡作成機能24は、顔面Fにおける任意の複数位置に接触子17を接触させたときに、当該各位置の座標をマッサージ軌跡上の設定点として記憶する記憶部28と、前記設定点をスプライン曲線で補間することでマッサージ軌跡を求める軌跡決定部30とを備えている。
(もっと読む)
マッサージ器
【課題】 この発明は、二組の柄をバンドで連係することにより柄をテコとして使用し、柄を両手で操作するだけでふくらはぎにマッサージや指圧を容易に施せるようにした、マッサージ器を提供する。
【解決手段】 柄(1)(2)と柄(1)(2)の端側に施療子(3)(4)を設け、柄(1)(2)に取り付け穴(5)(6)を設け、取り付け穴(5)(6)に吊具(7)(8)を装着し、吊具(7)(8)にバンド(9)を取り付け、バンド(9)に面ファスナー(10)を設けたことを特徴とする。
(もっと読む)
マッサージ機
【課題】機械的マッサージとエアマッサージとが組み合わされた効果的なマッサージを実行することができるマッサージ機を提供すること。
【解決手段】機械的マッサージを行う揉み玉を設けた背もたれ部と、エアマッサージを行うエアバッグを設けた座部と、を備え、前記エアバッグを膨張状態に維持して使用者の臀部を持ち上げた状態で、当該臀部を前記揉み玉により機械的にマッサージ可能な椅子型のマッサージ機とした。
(もっと読む)
椅子型マッサージ機
【課題】 1基の駆動源によって、被施療者のリラックスした姿勢を維持したまま、背凭れ部と座部のリクライニングを行ない、且つリクライニング中に衝撃や衝撃音が発生することのない椅子型マッサージ機を提供する。
【解決手段】 リンク機構でもって、背凭れ部20を起立状態から傾倒状態まで揺動させるときに、座部30前端が途中までは上昇してその後下降する構成とし、リンク機構を構成するリンク片55,57同士を接続する枢軸74と、該枢軸の外周に嵌めこまれ、両リンク片の枢軸の周囲の相対する面同士に対して、枢軸方向の互いに反発し合う力を与える弾性体(90)とを具え、弾性体により、両リンク片の枢軸と直行する方向の動きに規制を与えて、座部前端が上昇から下降に転ずる際の枢軸周りのがたつきを防止する。
(もっと読む)
マッサージ機
【課題】操作性が極めて良好で、使用者が直観的に操作することが可能な操作部を備えたマッサージ機を、コスト増のおそれなく提供すること。
【解決手段】座部に対して前後揺動自在に取付けられた背もたれ部と、前記背もたれ部に上下昇降可能及び前後進退可能に配設した施療部と、この施療部及び/又は前記背もたれ部を操作する操作部と、この操作部と有線又は無線により接続され、当該操作部による操作に応じて前記施療部及び/又は前記背もたれ部の動作を制御する制御部と、を備えたマッサージ機において、前記操作部はモーションセンサを備え、前記制御部は、前記操作部の動きに対する前記モーションセンサの検知結果に応じて、前記施療部及び/又は前記背もたれ部に所定の動作を実行させるマッサージ機とした。
(もっと読む)
椅子型マッサージ機
【課題】 被施療者にとって十分なストレッチ感が得られるような椅子型マッサージ機を提供する。
【解決手段】 椅子型マッサージ機1が備える制御部50は、アクチュエータ37による背凭れ部3の後傾に連動して、エアセル(押圧部)7cにより背凭れ部3に支持された被施療者の腰部付近を押し上げるように押圧すべく構成されている。
(もっと読む)
41 - 60 / 136
[ Back to top ]