
Fターム[5B050BA02]の内容
Fターム[5B050BA02]に分類される特許
41 - 60 / 108
地物輪郭線作成装置
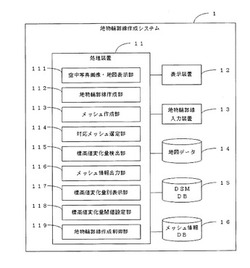
【課題】地物輪郭線の誤作成防止機能を備えた地物輪郭線作成技術を提供する。
【解決手段】メッシュ作成部113が、表示対象領域を一定間隔おきに格子状に区切ったメッシュを自動的に作成し、メッシュ情報データベース16内に格納する。DSMデータベース15に基づいて、選定された対象となるメッシュ内における任意地点の標高値とその周囲の地点との標高値から、標高値の変化量を算出得られた標高値変化量に基づいて、その値が閾値以上であるか否かを判定する。標高値変化量が閾値以上である場合にはこの領域が変化量が大きい領域であることを示す、第1の色調又は第1の輝度の少なくともいずれか一方で表示させる。メッシュ情報データベース16における、輪郭線作成可否フラグを“True”とし、輪郭線を作成することが可能であることを記憶させる。一方、変化量が小さい領域の第2の色調又は第2の輝度の少なくともいずれか一方で表示する。
(もっと読む)
区画データ作成システム

【課題】農地区画地図を作る際における負荷を低減し、コストを削減する。
【解決手段】予め用意された画像データを入力とし、エッジデータを抽出する。エッジデータから、区画データ得る。区画整形処理を行い、区画データを更新する。さらに、区画確信度データの一部を得る。最後に、区画データと区画確信度データとを入力として区画確信度判定処理を行い、区画データと区画確信度データとに更新する。主に確信度の図形的な要素が入力されたデータに加えて、ここでは色やテクスチャ情報の分析を行い詳細化する。また、周囲の区画との並びを考慮して一部形を修正し、農地地図としてより自然なデータを作成する。区画データと区画確信度データとは、このシステムの目的とするデータであり、利用しやすい簡潔な農地区画のデータに加えて、それらを確認する時に目安となる自己判定の値が確信度として表されている。
(もっと読む)
仮想画像を表示するための方法
本発明は、領域の各点に対して画素及び高さを記憶するために領域のステレオ記録を使用して領域における三次元物体の仮想画像を表示するための方法に関する。この方法は、異なる立体角の少なくとも三つの異なるステレオ記録からのステレオ記録が領域をカバーするために使用されること、各々の異なる立体角に対して画素点ごとのテクスチャ及び高さについてのデータを含む少なくとも一つのデータベースが確立されること、及び仮想画像を表示するためのデータが、仮想画像が表示される方向に依存して異なるデータベースから組み合わされることを特徴とする。 (もっと読む)
衛星画像の選択操作支援方法及び装置
【課題】 衛星画像の発注者が、撮影済み画像の中から最適な候補画像を簡便に選択することを支援するための方法を提供すること。
【解決手段】 衛星画像の検索装置が、発注者端末から撮影済み衛星画像の購入希望領域の指定情報を受付けたときに、購入希望領域を撮影済み領域内に含む撮影済み衛星画像のサムネイル画像を撮影済み画像データベースから検索し、検索結果の撮影済み衛星画像のサムネイル画像のうち購入希望領域をカバーしない部分はマスクする画像処理を実施したマスク加工済みサムネイル画像を生成して発注者端末に送信するステップと、
発注者端末が、検索装置から受信したマスク加工済みサムネイル画像を発注者端末の検索結果表示領域に一覧表示し、一覧表示されたマスク加工済みサムネイル画像の中から発注者が希望する購入希望領域を含むマスク加工済みサムネイル画像の選択操作を受付けるステップを備える。
(もっと読む)
交差点位置抽出方法、交差点位置抽出プログラムおよび交差点位置抽出装置
【課題】交差点情報を抽出するのに要する計算時間を短縮することの可能な交差点位置抽出方法を提供する。
【解決手段】回転角θごとにTb(θ;x,y)をI(x,y)の各画素に対してFFTを用いて畳み込むことによりH(θ;(x,y))を計算し(S201)、交差点モデルの各分枝の方向角θiに対応するH(θi;(x,y))を足し合わせることにより交差点モデルでのD(Mθ(x,y))を計算し(S202)、各画素において、D(Mθ(x,y))をθに関して微分し、微分値がゼロとなるθの値を求め、その中で最大のD(Mθ(x,y))をR(x,y)として抽出し(S203)、R(x,y)の極大値を検出し、画像データI(x,y)の極大値に対応する位置を交差点位置として抽出する(S104)。
(もっと読む)
空撮画像の位置合わせ装置およびプログラム
【課題】画像中の地物の濃淡の不変度が保証されない場合、事前にほぼ同一領域を撮影したデータを持っていない場合にも空撮画像の位置合わせを行える。
【解決手段】機体より所定の時間間隔で地表の空撮対象領域を撮影して空撮画像を得る画像空撮手段、その撮影時刻、位置、姿勢データを空撮情報として得る空撮情報検出手段、撮影時に空撮対象領域内を移動する特定車両に搭載され車両位置と位置取得時刻を得る現在位置記録手段、特定車両の屋根の色彩を入力保持する色彩入力手段、撮影ごとの空撮対象領域を空撮情報に基づく仮位置合わせ、その空撮画像から特定車両と同じ色彩の色彩物を検出、検出色彩物から同時刻の特定車両の位置に近い色彩物を算出、算出色彩物の位置と対応する特定車両の位置から仮位置合わせした空撮対象領域の位置を補正する位置合わせ計算手段を備える。
(もっと読む)
道路地図データ作成装置
【課題】高度上空から地表を撮影した観測画像に基づき、ユーザの負担を軽減し、幅員情報を含む道路のベクトルデータを作成する。
【解決手段】幅員推定処理部は、記憶装置の道路領域データ記憶領域から道路領域データを読み込む。次いで、各道路ベクトルに対し、道路ベクトル長を計算する。次に、各道路ベクトルの道路ベクトル長と統合数とから幅員を推定する。本実施の形態では、道路追跡処理部103において道路ベクトルを抽出する際に、画像全体に対して均等に開始点を設定しているため、道路の面積が大きいほど多くの道路ベクトルが抽出される。そのため、道路統合処理部104において重複した道路ベクトルを統合する際には、道路の面積が大きいほど統合される道路ベクトルの本数も多くなる。面積は道路の長さと幅員とから概算することができるため、道路ベクトル長と道路ベクトルの統合数とから幅員を推定することができる。
(もっと読む)
選択可能な補筆機能に基づくボイド修復を提供する地理空間的モデリング・システムおよび関係する方法
地理空間的モデリング・システム(30)が地理空間的モデル・データ記憶装置(31)およびプロセッサ(32)を含む。プロセッサ(32)は、地理空間的モデル・データ記憶装置(31)と協働して、地理空間的モデル周波数領域データ・セット(55)の参照サンプル(110r)を選択して対応する参照サンプル(110r)地理空間的モデル空間領域データ・セットに変換し、複数の異なる補筆機能のうちからの初期の選択された補筆機能に基づいて前記地理空間的モデル周波数領域データ・セット(50)の少なくとも一つのボイド中にデータを補筆しうる。前記プロセッサ(32)はさらに、補筆された地理空間的モデル周波数領域データ・セット(55)の試験サンプルを選択して対応する試験サンプル(110t)地理空間的モデル空間領域データ・セットに変換し、前記参照サンプル地理空間的モデル空間領域データ・セット(50)と前記試験サンプル(110r)地理空間的モデル空間領域データ・セットを比較して前記補筆を前記複数の補筆機能のうちからの別の補筆機能を使って繰り返すかどうかを決定しうる。  (もっと読む)
(もっと読む)
空間情報データベース生成装置及び空間情報データベース生成プログラム
【課題】高い測量精度を実現することができる空間情報データベース生成装置及び空間情報データベース生成プログラムを提供する。
【解決手段】正射投影作成部18が光学カメラ10により取得された地表面の光学画像から正射投影図を作成し、DSM生成部20が正射投影図からDSMを生成する。また、レーザ点群データ生成部22が、レーザ測量装置による地表面のレーザ測量結果に基づき、三次元点群データを生成する。オブジェクト生成部24は、DSMの高さデータ及び三次元点群データの高さデータを、建物等のオブジェクト毎に一塊化する。合成部26は、上記一塊化したDSMの高さデータ及び三次元点群データから同一のオブジェクトを抽出し、それぞれの座標情報に基づいて対応付けを行って、各オブジェクト毎に、光学画像の高さ情報を、三次元点群データの高精度な高さ情報に置き換える。
(もっと読む)
領域の3次元マップ表現を提供するための装置及び方法
【課題】領域の3次元マップ表現を提供する装置と方法を提供すること。
【解決手段】この装置は、画像生成ユニット204及び処理ユニット206を備え、画像生成ユニットは時間記録画像を生成するように構成される。画像生成ユニットは、前記領域の少なくとも一部分を覆う、少なくとも部分的にオーバラップする複数の画像を供給するように構成される。処理ユニットは、3次元マップ表現を提供するために、画像生成ユニットによって生成された少なくとも部分的にオーバラップする任意数の画像の組を立体処理するように構成される。この装置は、ナビゲーションユニット205が、画像生成ユニットに関係する時間記録されたナビゲーション状態を出力するよう構成され、処理ユニットが、立体処理されることになるそれぞれの時間記録画像に対して、対応する時間記録に関係するナビゲーション状態を関連づけるよう構成されている。
(もっと読む)
画像表示装置および画像表示方法
【課題】立体オブジェクトを仮想空間において写実的に表現する。
【解決手段】画像表示装置は、仮想空間内にある仮想地球202の表面に貼り付けるべき画像として、球座標マップ画像とキューブマップ画像をそれぞれ保持する。視点から立体オブジェクトまでの距離である観察距離が境界値よりも大きいときには、キューブマップ画像を仮想地球202にマッピングし、観察距離が境界値以下であるときには、球座標マップ画像を仮想地球202にマッピングする。
(もっと読む)
モノクロ陰影点群図およびその作成方法
【課題】 3次元計測点群から得られたグラウンドデータの簡単な作成と、正確性が要求され、結果、正確な等高線図を得ること、正確なDEM化が強く求められている。
【解決手段】 本発明は、3次元計測点群から、モノクロ陰影図を作成する工程と、グラウンドデータとを作成する工程を含み、前記モノクロ陰影図に前記グラウンドデータをレイヤー表示する工程を含むモノクロ陰影点群図の作成方法とこのように得られたモノクロ陰影点群図および前記モノクロ陰影点群図の活用を提供する。
(もっと読む)
地図変化検出装置、地図変化検出方法およびプログラム
【課題】ステレオ画像から得られる3次元データを用いて2次元地図上の家屋、建築物などの変化を検出する。
【解決手段】地図に記載される対象となる地物の変化を検出する変化検出装置100であって、複数の異なる位置から所定の領域を撮影した複数の画像を入力として、所定の領域の表層を3次元座標で表したデジタル表層モデルデータを抽出するステレオ処理部50と、ステレオ処理部50で抽出したデジタル表層モデルデータから、地表面の標高を差し引いた地物高さを抽出する地物高さ計算部60と、地物高さ計算部60で抽出した地物高さデータと地図データとを比較して、対象となる地物の変化を検出する滅失判定部80又は新築判定部90と、を備える。高所領域抽出部70は、地物高さデータのうち所定の値以上の高さを有する地点の集合である高所領域を抽出し、該高所領域と地図データとを比較して、対象となる地物の変化を検出してもよい。
(もっと読む)
地理空間データのデータ間引きを提供する地理空間モデリングシステム及び関連する方法
地理空間モデリングシステムは、関連する各自の高度を有する地理空間データポイントを格納する地理空間データベースを有する。本システムはさらに、前記地理空間データポイントから識別ポイントを選択することによって、前記地理空間データポイントをデータ間引きするプロセッサを有する。より詳細には、前記プロセッサは、(a)複数の離間した現在の地理空間データ境界ポイントを有する現在パッチを特定し、(b)前記現在の地理空間境界ポイントに対する各自の高度差を決定するため、前記地理空間データポイントを順次投入し、前記高度差と閾値範囲とを比較することに基づき前記現在パッチによる現在の識別ポイントを選択し、(c)前記現在の識別ポイントを含む複数の離間した新たな地理空間境界ポイントを各パッチが有する複数の新たなパッチを特定し、(d)さらなる新たな識別ポイントが選択されなくなるまで、前記新たなパッチのそれぞれについてステップ(b)及び(c)を繰り返す、ことに基づき、識別ポイントを選択するようにしてもよい。  (もっと読む)
(もっと読む)
盗難車両検索システムおよび盗難車両検索システムにおける検索方法
【課題】航空機や人工衛星から撮像した画像を用いて盗難車両の検索を可能にする。
【解決手段】車両5に固有な識別コードを図形パターンで表現した識別情報担持手段11を車両5の上方から光学的に読取可能となるように車両5に設ける。航空機または人工衛星のような飛行物体3に搭載された撮像手段4で地上の画像が撮像され、航空機や人工衛星から撮像された画像が画像記憶手段1に蓄積される。端末装置6が識別コードを検索キーに用いて車両5を検索すると、端末装置6とは広域網7を介して通信可能な検索手段2が、検索キーとして与えられた識別コードに対応する図形パターンを含む画像を抽出する。また、検索手段2は、当該画像と画像内での車両5の位置情報とを端末装置6に画面表示させる。
(もっと読む)
地理空間モデルの周波数領域データにおける空隙の非線形修復を提供する地理空間モデリング・システム、及び関連した方法
地理空間モデリング・システム(20)は、地理空間モデル・データベース(21)、及びプロセッサ(22)を含み得る。特に、プロセッサ(22)は、少なくとも一空隙から少なくとも一空隙にコンター・データを伝播することに基づいて、地理空間モデル周波数領域データ(101)における少なくとも1つの空隙(102)にデータを修復し、地理空間モデル周波数領域データを、修復後に、地理空間モデル空間領域データ(110b)に変換するために地理空間モデル・データベース(21)と協調することができる。  (もっと読む)
(もっと読む)
画像提供システム
【課題】航空機や人工衛星から撮像した画像の付加価値を高める。
【解決手段】建物8などの特定領域に画像内での表示方法を指定する表示方法情報を図形パターンで表現した情報担持手段11を設ける。情報担持手段11は、図形パターンが上方から光学的に読取可能となるように設ける。航空機または人工衛星のような飛行物体3に搭載された撮像手段4で地上の画像が撮像され、航空機や人工衛星から撮像された画像が画像記憶手段1に蓄積される。画像選択手段2は、端末装置6から広域網5を通して画像の提供が要求されると、指定された場所を含む画像を画像記憶手段1から抽出し、画像内に含まれる情報担持手段11の表示方法情報に従って加工した画像を端末装置6に表示させる。
(もっと読む)
人口推定装置およびプログラム
【課題】地図上で指定された範囲内の人口を推定する。
【解決手段】画像取得部14は、空中写真画像記憶部50からユーザによって指定された範囲の空中写真画像を選択する。建物抽出部16は、選択された空中写真画像を画像処理して地上の建物を抽出する。照合部20は、指定された範囲の空中写真画像を同範囲の用途地域図画像と比較し、特定の用途地域にある建物を非住宅と判定する。内包判定部22は、建物の平面形状に基づいて建物を住宅と非住宅とに分類する。住宅確率算出部24は、画像処理によって建物の輪郭線を抽出し、輪郭線で囲まれた面積と外周長とを算出し、面積と外周長との関係に応じて建物が住宅である確率を算出する。居住人数算出部30は、住宅の容積を推定し、容積に用途係数と住宅確率とを乗じることで各住宅における居住人数を算出し、指定範囲内の全ての住宅についての居住人数を合計する。
(もっと読む)
3次元電子地図データの生成方法
【課題】建造物の3次元モデリングの効率化を図る。
【解決手段】3次元モデリングの対象となる領域について、航空機からのレーザ計測によって、数mのメッシュ単位で高さデータを取得する。この高さデータから、2次元の地図データに記憶された建造物領域内に存在するデータのみを抽出し、度数分布を解析して、低階層(白抜き)、タワー低(ハッチング)、タワー高(クロスハッチ)のように、各階層に属するメッシュを特定する。次に、各メッシュの領域を、高さデータに応じて立ち上げることにより、建造物の3次元モデルを生成する。こうすることにより、複雑な形状の3次元モデルを比較的軽い負荷で精度良く生成することができる。
(もっと読む)
FMCW方式合成開口レーダ、偏流角検出方法、プログラムおよび記憶媒体
【課題】GPS/INSや角度計測可能な高級なGPSシステムなどの高価な姿勢センサを併用することなく、偏流角を簡単に取得することが可能なFMCW方式合成開口レーダを提供する。
【解決手段】FMCW方式合成開口レーダを搭載した飛翔体の偏流角を検出するための偏流角検出信号として、FMCW信号の送信頻度に比して十分に低い頻度で、偏流角検出信号送信部2から予め定めた一定周波数の連続信号であるCW信号をFMCW信号の間に挿入して送信し、または、偏流角検出信号送信部2AからFMCW信号に比し十分に小さい周波数傾きを有する三角状の信号からなるUP信号・DOWN信号を送信し、ターゲットにて反射された受信信号の中から、FMCW信号の間に挿入されたCW信号またはUP信号・DOWN信号の受信信号を抽出して、偏流角算出部12、12Aにて飛翔体の偏流角を算出する。
(もっと読む)
41 - 60 / 108
[ Back to top ]