
Fターム[5B050BA02]の内容
Fターム[5B050BA02]に分類される特許
21 - 40 / 108
監視カメラ画像を用いた連動表示計測システム
【課題】段階的な手段をとらなくとも一目で監視カメラ画像、三次元画像、平面図画像上での指定個所をそれぞれの画像上で正確に直に提供できる単眼視の監視カメラ映像を用いた連動表示計測システムを得る。
【解決手段】カメラ選択部31と、モード判定部32と、画角設定部33と、表示処理部34と、カメラ画像指定個所連像表示部11と、GIS画像指定個所連動表示部12と、平面図指定個所連動表示部13等を備えて、対象範囲が数キロに亘る広範囲で撮影されたカメラ画像を三次元地形モデルに対応付けて、その監視カメラが撮影した三次元GIS画像並びに平面図画像を連動表示すると共に、いずれかの画像(カメラ画像、三次元GIS画像若しくは平面図画像)上の指定位置(カーソル)を各々の画像上に連動表示し、かつその指定位置の三次元座標を知らせる。
(もっと読む)
分類画像作成装置

【課題】 分類図を作成する場合、あらかじめ画像から手動により教師データを作成する必要があり、事前の知識が必要であった。
【解決手段】 画像402と地図データ401を対応付け、地図データに基づいて対象領域を画像上で特定し、対象領域から特徴量を抽出する。さらに、特徴量を特徴量空間でクラスタリングし、代表特徴を求め403、求めた代表特徴で画像全体を分類する404。
(もっと読む)
捜索目標位置特定装置及び捜索目標位置特定方法並びにコンピュータプログラム
【課題】航空機から捜索した起伏の多い地表面の目標物を精度良く測定し、位置特定の精度を向上させることを可能にすること。
【解決手段】目標物3の位置を水平面に投影した位置は、捜索目標物3が水平面から高さHの位置に有るので、カメラ2から見て捜索目標物3の方向に延ばした直線L1と、水平面との交点からR1だけずれた位置となる。しかし、実際には、地表面4は高度情報を含む3次元地勢データのメッシュで区切られた階段状の高度7であるため、この位置は符号R1' で示す位置となり、誤差が生じている。そこで、捜索目標物3に近接する既知の位置情報を有するランドマーク5とランドマーク6との間のカメラ2から見た方向角を計測することにより、ランドマーク5及びランドマーク6の高度を各々計測し、この高度情報を用いて目標物3の高度情報を算出し、捜索目標物3の方向に延ばした直線との交点を求めて捜索目標物3の位置を特定する。
(もっと読む)
地理情報生成システム及び地理情報生成方法
【課題】建物形状を正確に抽出することができる地理情報生成システムを提供する。
【解決手段】空中写真から建物の形状を抽出する地理情報生成システムであって、プログラムを実行するプロセッサと、前記プログラムの実行に必要なデータを記憶するメモリと、前記空中写真を格納する記憶部と、を備え、前記プロセッサは、前記記憶部に格納された空中写真中の隣接する画素の特徴量に基づいて、画像のエッジを検出し、前記検出されたエッジの方向を解析することによって、建物の方向を抽出し、前記抽出された建物の方向の直線を用いて、該建物の外形のポリゴンを生成することを特徴とする。
(もっと読む)
立体画像生成装置
【課題】立体画像に対してより立体感を出せ、水系を容易にたどれる視覚化立体地図を得る。
【解決手段】DEMデータ作成部6と、DEM読込間隔設定部7と、パラメータ計算部8と、立体赤色マップ作成部20と、傾斜画像階調補正部22と、地上開度画像階調補正部23と、地下開度画像階調補正部21と、L*チャンネル化部26と、b*チャンネル化部25と、a*チャンネル化部27と、L*a*b*カラー式画像化部と、階調補正部29と、XYZ表色系変換部と、RGB表色系変換部31と、合成部32と、微調補正部33、傾斜スペクトラム算出部52と、地下開度スペクトラム算出部51と、地上開度スペクトラム算出部53等を備えて、画像を地下開度が高い谷や窪地をシアン色に、地上開度の大きい尾根や頂上を赤色に調整し、この地上開度−地下開度調整画像を、赤色立体地図と重ねあわせ合成することによって画像(KLi)を得る。
(もっと読む)
モザイク画像生成方法、装置及びプログラム
【課題】
高解像度航空写真から地上のモザイク画像を形成する際の処理負担を軽減し、ミスを低減する。
【解決手段】
高解像度航空写真データ24の解像度を落とした低解像度航空写真データ26を用意する。前処理では、低解像度航空写真データ26に対し、機能38、42、44により、オルソ画像の生成、接合線探索及びモザイク合成を実行し、低解像度モザイク画像を生成する。色調補正係数決定機能46は、低解像度モザイ画像から各モザイク片の色調補正係数を決定する。本処理では、正射変換機能38が、高解像度航空写真データ24の、接合線探索で探索された暫定接合線に従う合成候補域から高解像度オルソ画像を生成する。色調補正機能48が、色調補正係数に従い高解像度オルソ画像の色調を補正する。接合線探索機能42及びモザイク合成機能44が、高解像度オルソ画像から高解像度モザイク画像を生成する。
(もっと読む)
レーダー画像処理装置
【課題】レーダー画像の相関値を利用して変化検出を行なう場合、有意な地上変化以外の要因によって相関値が低下することを抑え、有意な地上変化による相関値低下との区別を可能にする。
【解決手段】相関値算出部12で算出した相関値を、観測幾何補正部16で観測条件の相違による影響を補正し、データベース部17において、上記補正を行なった相関値と地理情報等の環境情報とを関連付けたデータベースを作成する。変化検出を行う際には、観測領域相関値推定部23において上記変化検出処理範囲の環境情報を元にデータベース用いて相関値を推定し、これを用いて変化域判定部24において、変化検出処理範囲内における変化域を検出する。
(もっと読む)
画像をカラー化する地理空間モデリングシステム及び関連する方法
地理空間モデリングシステムは、地理的エリアのカラー化3次元(3D)モデルを格納する地理空間モデルデータベースと、前記地理空間モデルデータベースと協働するプロセッサとを有する。前記プロセッサは、前記カラー化3Dモデルに基づき収集されたモノクロ画像に対応する推定されたモノクロ画像を生成し、前記推定されたモノクロ画像と前記収集されたモノクロ画像との間のモノクロ差分画像を生成し、前記モノクロ差分画像に基づき前記収集されたモノクロ画像に対応するカラー化画像を生成するよう構成される。 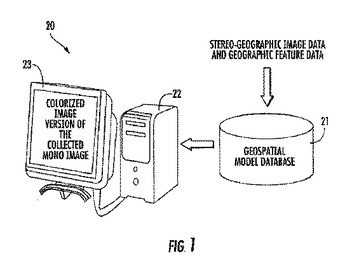 (もっと読む)
(もっと読む)
画像表示処理装置及び画像表示処理方法
【課題】高空から撮影した3バンド以上を有する画像に対して、画像に写っている複数の目的物をそれぞれ異なった表示方法で表示する。
【解決手段】画像300は、5つのそれぞれ異なる波長領域帯を撮影した多バンド301〜305に対応し重ねられる画像から構成する。また、画像300は位置情報を有している。その上に領域データ310がフィルタとして重ねる。領域データ310も位置情報を有しており、その位置情報を元に画像の位置情報を介して画像300と関連付けし、図示するように位置合わせして重ねる。領域データ310は、その中に地上の被覆分類を示すデータ、例えばデータ311から314までを有する。ここでは、311が湖領域、312が森領域、313が都市領域、314が海領域である。これらの領域データは、画像データの一部として直接画面上に表示されるものではないが、領域データの内容を変更したり、確認したりする場合は表示する。
(もっと読む)
シーン補間及び登録性能評価のための2D電子光学的画像及び3D点群データの融合
共通シーンの改善された可視化及び登録処理の成功裏の補間のための3D点群と2D画像を組み合わせる方法及びシステムについて開示している。結果として得られた融合データは、オリジナルの3D点群からの情報及び2D画像からの情報の組み合わせを有する。オリジナルの3D点群データは、カラーマップタグ化処理に従ってカラー符号化される。異なるセンサからのデータを融合することにより、結果として得られるシーンは、戦争空間認識、目標識別、レンダリングされたシーンにおける変化検出及び成功裏の登録の決定に関連する有用な複数の属性を有する。  (もっと読む)
(もっと読む)
2D電子光学的画像データに対する3D点群データの登録
二次元画像データセット及び点群データを有する三次元画像の登録のための方法及びシステムについて開示している。本発明の方法は、シーンにおいて地表面を有する点群データの一部を除去するように、三次元画像データを有する点群データの三次元ボリュームをクロッピングするステップと、三次元ボリュームをm個のサブボリュームに分割するステップとにより始まる。次に、その方法は、二次元画像データをエッジ強調するステップを有する。次に、サブボリュームを各々適格化するために、フィルタ処理された濃淡画像を生成し、エッジ強調された前記二次元画像データ及び前記フィルタ処理された濃淡画像に基づいて、二次元相関表面を演算し、前記二次元相関表面のピークを求め、前記二次元画像における前記ピークの対応する位置を決定し、対応点セットを規定し、そして点セットリストにおける前記対応点セットを記憶するステップを有する。最終的には、点セットリストに含まれる複数の相関点セット間の誤差を最小化する変換が決定される。  (もっと読む)
(もっと読む)
地盤高抽出装置、地盤高抽出方法、地盤高抽出プログラム、記録媒体
【課題】簡易に3次元標高データから3次元地盤高データを求める。
【解決手段】本発明の地盤高抽出装置は、分割部、区画標高抽出部、対象外区画検出水理解析部、降雨水理解析部、3次元補正標高データ更新部を備える。分割部は、算定範囲を区画に分割する。区画標高抽出部は、区画ごとに3次元補正標高データを求める。対象外区画検出水理解析部は、初期浸水を与えた場合の所定の時間後の区画ごとの水深を、水理解析によって求め、所定より深い水深となった区画を補正対象外区画と判断する。降雨水理解析部は、3次元補正標高データに対して、雨を降らせた場合の水深を水理解析によって求める。3次元補正標高データ更新部は、水深が所定より浅い区画の標高データを、当該区画から所定の範囲内の区画であって、補正対象外区画と判断されていない区画の標高データの中で最も低い標高データに変更することで、3次元補正標高データを更新する。
(もっと読む)
ステレオマッチング処理装置、ステレオマッチング処理方法およびプログラム
【課題】ステレオマッチング処理の速度と精度を向上する。
【解決手段】画像データ入力部10は、複数の異なる位置から所定の領域を撮影した複数の画像の画像データを取得する。基準視差設定部12は、複数の画像に対応して基準の視差を設定する。探索範囲設定部13は、基準視差設定部12で設定された基準の視差を与える画像の点を基準に、画像の範囲よりも小さい所定の範囲をステレオマッチングの探索範囲に設定する。ステレオマッチング部11は、複数の画像の一つの画像内の任意の点について、基準視差設定部12で設定された基準の視差を与える他の画像の点を基準に、探索範囲設定部13で設定された探索範囲で、他の画像の対応する点を探索する。
(もっと読む)
目標物位置特定装置および目標物位置特定方法
【課題】機上で撮影した映像の3次元処理を機上で行うには重量および動作環境の点で問題があり、また撮影した被災地点の空間的な位置を簡単に特定できる目標物位置特定装置を得る必要があった。
【解決手段】ヘリコプタに搭載した送信局100と地上の受信局200で構成され、送信局は、映像入力装置111で撮影した映像を地上に送信すると共に、ヘリコプタのフライト情報、および機上の操作者が入力装置132で指定した目標物の座標情報と指定した時点の時刻情報のデータを地上に送信し、受信局は受信した時刻情報をキーに映像解析装置230で過去の撮影映像から3次元モデルを生成し、指定された目標物の3次元位置を特定するようにした。
(もっと読む)
傾斜性地理的位置決め及び測定システム
【課題】捕捉された傾斜画像から表示し、地理的位置決めし、そして計測を行うコンピュータ化システムはコンピュータシステムによりアクセス可能はデータファイルを有する。そのデータファイルは、複数の捕捉された傾斜画像に対応する複数の画像ファイルと、それらの画像に対応する位置データとを有する。
【解決手段】画像表示及び解析ソフトウェアは、データファイルを読み取り、捕捉された傾斜画像の少なくとも一部を表示するシステムにより実行される。そのソフトウェアは、表示画像における1つ又はそれ以上のユーザにより選択された点についての位置データを検索し、いずれかの2つ又はそれ以上の選択された点間の離間距離を演算する。その離間距離の演算は、選択された点間の直線距離、選択された点で囲まれた面積、選択された点間の相対的仰角、選択された点間の高さ方向差分を含む種々のパラメータを決定するようにユーザにより選択可能である。
(もっと読む)
物体情報取得装置
【課題】2次元地図情報及び高さ情報に基づいて、物体情報を安定した精度で効率良く取得することができる物体情報取得装置を提供する。
【解決手段】2次元地図情報内の物体情報を取得する物体情報取得装置1であって、地図情報を所定の大きさの領域に分割する領域分割部11と、領域内に静止物が存在するか否かを判定する静止物判定部12と、領域内に点在する所定箇所での高さを取得する高さ取得部13と、所定箇所での高さに基づいて領域の高さを推定する第1推定部15及び第2推定部16と、を備え、静止物判定部12により領域内に静止物が存在すると判定した場合には、第1推定部15により領域の高さを推定して物体情報とし、静止物判定部12により領域内に静止物が存在しないと判定した場合には、第2推定部16により領域の高さを推定して物体情報とすることにより、領域の高さを安定した精度で効率良く取得することができる。
(もっと読む)
最適斜め写真提供方法及び最適斜め写真提供システム並びに最適斜め写真提供装置
【課題】地理情報検索の様々な検索用途の目的にあわせて、様々な手段により撮影された写真の中から、希望する撮影方向、希望する大きさで、かつ複数の地物が存在していても検索対象地物を容易に見つけることができる最適写真提供方法を得る。
【解決手段】会社、自宅のパソコン又は携帯電話器等の利用者端末1とサービス提供センター2とを通信ネットワーク3に接続して、サービス提供センター2が、利用者端末1に地図を提供して、この地図上で選択された対象地物を、ユーザが要望した場所(道路、公園、河川、線路・・・)に接する面を写している撮影方向の写真、俯角判定による最適な写真、オクルージョン率による最適な写真を提供する。
(もっと読む)
画像判読支援方法および装置
【課題】
正確な画像判読結果が容易に得られる画像判読支援方法および装置を提供する。
【解決手段】
観測センサ102から得られるリモートセンシング画像を判読して得られた、複数個の同一種の地物に対して、判読支援装置112の自動分類手段113は、分光特性、放射特性、散乱特性、テクスチャ、形状のいずれか、あるいは、これらの組み合わせによって自動分類を行い判読結果データベース106に蓄積する。判読結果修正候補抽出手段107は、自動分類結果である尤度の比較を行うことで判読結果修正候補を抽出する。この判読修正候補に対して再判断を行い、判読結果更新手段110により、判読結果データデース106を更新する。これにより、効率よく判読作業の修正作業を行うことができる。
(もっと読む)
数値地図データ処理方法、数値地図データ処理プログラム及び数値地図データ処理装置。
【課題】数値地図に基づいて地形を複数の要素からなる地貌指数で表し、可視性に優れた地図を作成する数値地図データ処理方法を提供することを目的とする。)
【解決手段】数値地図データ50から、各格子点Eにおける標高値kを読み取る。中心格子点を囲繞する複数の格子点Eにより構成される範囲を近傍範囲NAとして、近傍範囲NA内の全格子点Eの標高値kの中から接峰標高値kmax及び接谷標高値kminを読み取り、R=(k−kmin)/(kmax−kmin)の式から比標高Rを算出する。次に、各格子点Eの標高値kに基づき、各格子点Eの斜面の傾斜角θを算出する。そして、全格子点Eについて、T=log(k×tanθ×R)の式から地貌指数Tを算出する。そして、地貌指数Tから全ての格子点Eについて色画像データを算出し、色画像データを各格子点Eに貼り付ける等によって対応させることにより地貌図を作成し、表示部5に表示し、出力部6で出力する。
(もっと読む)
地物抽出装置
【課題】 航空写真から地物を精度良く抽出する。
【解決手段】 ネットワークデータベース220に基づいて道路を表すポリゴンを設定し、航空写真と重ね合わせることによって、航空写真から道路に該当する部分を削除する。こうして道路で区切られた処理区画を設定し、処理区画ごとにエッジ抽出、2値化を行って地物枠を抽出する。2値化を行う際には、複数の閾値を順次用い、地物の輪郭部分の明度に適した閾値を使い分ける。また、壁面が道路に平行に存在するなどの抽出ルールを適用する。こうすることによって、地物の抽出精度を向上させることができる。
(もっと読む)
21 - 40 / 108
[ Back to top ]