
Fターム[5B050EA13]の内容
イメージ処理・作成 (84,044) | 画像処理 (22,430) | 画像操作(画素位置変換) (3,634) | 補正、変形(位置合せ、近似) (1,135)
Fターム[5B050EA13]に分類される特許
161 - 180 / 1,135
画像処理装置およびこれを備えた原稿読取システム
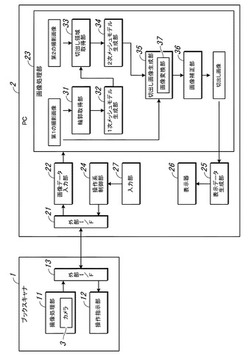
【課題】原稿の紙面上で指などの指示物で領域を直接指定する動作で切出し画像を取得することができるようにする。
【解決手段】指などの指示物のない状態で原稿の紙面を載置面とともに撮影した第1の撮影画像と、原稿の紙面上で切り出すべき領域を指し示す指示物を原稿の紙面とともに撮影した第2の撮影画像とを取得し、切出し領域取得部33にて、第2の撮影画像から指示物が指し示す点を検出して切出し領域を求め、切出し領域取得部33は指示物が指し示す1点の軌跡で表される指定領域に基づいて切出し領域を求める。
(もっと読む)
実在環境内においてデジタルモデルを視覚化する方法及び装置

【課題】ユーザーによる実在環境内における仮想モデルの視覚化を実現する方法及び装置を提供する。
【解決手段】強化されたビデオフローを形成するべく、実在環境を撮影するカメラのビデオフロー内に3D仮想オブジェクトの2D表現をリアルタイムで挿入し、複数のビデオフローを生成する複数のカメラを同時に使用することにより、異なる視角に応じて、実在環境内において仮想オブジェクトを視覚化可能である。特定のビデオフローを使用し、仮想モデル上における実在環境の効果を動的に生成している。例えば、仮想モデルは、デジタル複写であるか、又は実在複写の仮想的な強化であってよい。例えば、強化されたビデオフロー内に実在人物の表現などの仮想2Dオブジェクトを挿入可能である。
(もっと読む)
情報処理装置、オーサリング方法及びプログラム
【課題】専門知識を有しない一般のユーザでも容易にARコンテンツをオーサリングすることを可能とすること。
【解決手段】撮像装置を用いて撮像された実空間を映す入力画像を取得する画像取得部と、上記入力画像を表示装置の画面上に表示させ、上記画面上でユーザにより指定される指定位置を検出するユーザインタフェース部と、仮想オブジェクトの拡張現実空間内での3次元位置を、上記ユーザインタフェース部により検出される上記指定位置から計算する計算部と、上記計算部により計算される上記仮想オブジェクトの上記3次元位置を上記仮想オブジェクトと関連付けて記憶媒体に記憶させるオーサリング部と、を備える情報処理装置を提供する。
(もっと読む)
画像処理方法、画像処理装置および表示装置
【課題】より高い精度で立体視画像の視差を推定する。
【解決手段】画像処理方法は、第1の画像の1または複数の画素である第1の画素と、第2の画像において上記第1の画素群に対応する位置にある1または複数の画素である第2の画素とについて、上記第1の画像と上記第2の画像との間のバックマッチングによって第1の指標値を算出するステップ(ステップS103)と、上記第1の画素と上記第2の画素との間の相関性を示す相関性指標値を、上記第1の画素によって示される画像の複雑度を示す複雑度指標値を用いて正規化することによって第2の指標値を算出するステップ(ステップS105)と、上記第1の指標値と上記第2の指標値とをかけ合わせることによって第3の指標値を算出するステップ(ステップS107)とを含む。
(もっと読む)
骨格モデルの関節角度の曲がりにくさの制御装置,方法,及びプログラム
【課題】骨格モデルにおいて,関節の曲がりにくさを設定した場合に,不自然なポーズとなってしまうことを改善し,自然な姿勢が得られる骨格モデル制御方法を提供する。
【解決手段】複数の骨が1つ以上の関節によって連結されている骨格モデルの関節角度を制御する方法であって,関節の現在の角度パラメータθpを取得する現在角度取得ステップと,前記関節角度の曲がりにくさ係数wが設定されていない状態で,前記関節角度の補正されていない角度パラメータθnを算出する未補正角度算出ステップと,前記現在の角度パラメータθpと前記未補正角度パラメータθnとに基づいて,予め定められた規則を適用して前記曲がりにくさ係数wを決定し,前記曲がりにくさ係数wを前記関節に適用した場合の,補正された角度パラメータθmを決定する補正済角度決定ステップと,を有する方法によって実現される。
(もっと読む)
骨格モデルの捻りの制御装置,方法及びプログラム
【課題】骨格モデルで,骨に対して所望の量の捻りを加える操作を,少ない計算量で高速に実行する。
【解決手段】複数の骨が1つ以上の関節によって連結されている骨格モデルにおいて,捻り軸に対するエフェクタの捻りの角度を制御する方法であって,前記エフェクタは,前記関節又は前記骨の端点であり,三次元空間における位置及び向きのうち少なくともいずれか一方を所望の状態に制御する対象であり,前記方法は,前記骨格モデルにおける1つ以上の固定点の各々の位置を特定する,固定点特定ステップと,前記エフェクタの位置と前記1つ以上の固定点の各々の位置とに基づき,前記捻り軸を決定する,捻り軸決定ステップと,前記捻り軸に略垂直な平面上の第1の閉経路に沿って,前記エフェクタを動かす,第1閉経路移動ステップと,を有する。
(もっと読む)
画像生成装置および画像生成プログラム
【課題】複数の画像に基づいてモーフィング画像を生成する。
【解決手段】画像生成装置は、設定値を3枚以上のソース画像のそれぞれに対応づけて割り当てる設定値割当手段と、全ての設定値の和に対する各設定値の割合を求めてソース画像毎の貢献度を算出する貢献度算出手段と、各ソース画像の特徴ベクトルに対して、各ソース画像の貢献度の値を積算することにより積算ベクトルを求めて全てのソース画像の積算ベクトルを足し合わせることにより、モーフィング画像の特徴ベクトルを生成する特徴ベクトル生成手段と、モーフィング画像の特徴ベクトルと、各ソース画像と、各ソース画像の特徴ベクトルとに基づいて、各ソース画像をワープ画像に変形するワープ画像変形手段と、変形された各ワープ画像の画素値の合成を貢献度に応じて調整することによりモーフィング画像を生成するモーフィング画像生成手段とを備える。
(もっと読む)
画像変換処理装置
【課題】デジタル写真画像をスケッチ風の絵画調画像に変換して自然な感じで画面表示し又は印刷出力する画像変換処理装置を提供する。
【解決手段】読み込んだデジタル写真画像をその上下が画面の上下と一致するように画面表示する。トリミングしないときは、そのまま、横長の齣にトリミングしたときはそのまま拡大して画面に全面表示し、斜め左下がりの通常運筆のスケッチ風絵画調画像に変換する。縦長の齣にトリミングしたときは左右いずれかへ90°回転させてから拡大して画面に全面表示し、斜め右下がりの逆運筆のスケッチ風絵画調画像に変換し、変換後の画像の上下を天地に合わせて見たとき、斜め左下がりの通常運筆のスケッチ風絵画調画像に見えるようにする。
(もっと読む)
オブジェクト修正処理装置、方法及びプログラム
【課題】マウスやタブレット等の比較的単純な入力デバイスを用いて、オブジェクトに対する形状、位置、その他の属性の変更を、ユーザに直感的に理解しやすい手法で実行することができる装置、方法及びプログラムを提供する。
【解決手段】固有の属性を持つ複数のサンプルオブジェクトを、表示画面の異なる位置に配置するステップと、ユーザによって指定できるデバイスから指定された表示画面のポイント位置を取得するステップと、ターゲットオブジェクトの属性を変更するステップと、変更された属性に基づいてターゲットオブジェクトに修正を加えるステップを有する方法。
(もっと読む)
画像処理装置、立体画像印刷システム、画像処理方法およびプログラム
【課題】立体ベクトルを用いて、より自然で立体視しやすい立体画像を生成する画像処理装置を提供する。
【解決手段】画像処理装置は、立体画像を構成する立体画像データを外部から入力するための立体画像データ入力手段と、立体画像データから被写体を抽出する被写体抽出手段と、立体画像データに含まれる視点の異なる複数の平面画像データから被写体の立体ベクトルを算出する立体ベクトル算出手段と、立体ベクトルと立体画像データとを関連付けて記録する立体画像データ記録手段と、を有する。
(もっと読む)
レイアウトテンプレート生成装置および画像レイアウト装置
【課題】コマ割りの異なる複数のレイアウトテンプレート候補をユーザに提示して一つを選択させる際に、ユーザの選択肢が制限されず、かつ所望のレイアウトテンプレートを容易に選択できるようにする。
【解決手段】図4(b)の数値列DSのうち[1233233]部分と同図(a)の数値列DSの[122122]部分とは、木構造は異なるものの見かけ上のレイアウトが同じになる木構造を示しているので、[1233233]を一般化した数値列[k,(k+1,(k+2),Na)Nb]を被置換数値列Za、[122122]を一般化した数値列[(k,(k+1)Nb)Na]を置換数値列Zbと定義し、各順序木の数値列DSから被置換数値列Zaを含むDSを識別し、識別された数値列の被置換数値列Zaを置換数値列Dbに置換して生成されたクエリ数値列と一致する数値列DSを同一グループに分類する。
(もっと読む)
電子装置、硬さ算出方法、及びプログラム
【課題】音波を用いることにより、物体の硬さを検出する。
【解決手段】発振部110は、センサ用音波を発振する。検出部120は、物体で反射したセンサ用音波を検出する。距離算出部130は、発振部110がセンサ用音波を発振してから検出部120がセンサ用音波を検出するまでの時間に基づいて、物体までの距離を算出する。硬さ算出部140は、検出部120が検出したセンサ用音波の強度、及び距離算出部130が算出した距離に基づいて、物体の硬さを算出する。
(もっと読む)
文書コンテンツの順序付け
【課題】プリミティブエリアの集合に分割されているページについて、プリミティブエリアの集合を順序リストに編成するための新規の方法を提供する。
【解決手段】プリミティブエリアの集合に分割されているページについて、プリミティブエリアの集合を順序リストに編成するための方法である。順序リスト内のプリミティブエリアはまず、ページの座標系におけるプリミティブエリアの始点を比較する始点順序関係順序付けを用いてソートされる。順序リストにおけるプリミティブエリアの順序は次いで、比較されるプリミティブエリアに局所的な座標系に従ってプリミティブエリアを互いに比較する文脈的順序関係順序付けを用いて改良される。次いで、正しくなく順序付けされたプリミティブエリアを文脈的順序関係に従って入れ換えることによって新たな順序リストが生成される。
(もっと読む)
画像処理装置及びその制御方法、及びプログラム
【課題】画像に含まれる複数の部分領域の位置関係を維持したマルチ表示画像を生成する。
【解決手段】画像と、当該画像に含まれる予め定められた複数の部分領域の位置及び解像度の情報とを受信し、受信された画像に含まれる複数の部分領域のうち、2以上の部分領域を選択する。そして当該選択された2以上の部分領域それぞれに含まれる画像を受信された画像から切り出す。さらに当該2以上の部分領域の水平位置及び垂直位置の少なくともいずれかの位置関係を維持するように、切り出された2以上の部分領域の画像を配置したマルチ表示画像を生成する。
(もっと読む)
自由視点画像生成装置
【課題】カメラコストを抑えた高品質な仮想視点画像を生成する自由視点画像生成装置を提供する。
【解決手段】画像取得部において、入力画像は、解像度の異なる画像とする。画像処理コンピュータにより、高解像度画像Bを低解像度画像Cの画像サイズに合わせたサブサンプリング画像を生成し(S305)、低解像度画像とのマッチングにより被写体の奥行き画像を生成する(S310)。該奥行き画像をもとに、該高解像度画像を優先して参照し、操作入力部に対応した仮想視点画像を生成する(S315)ことで、高解像度の仮想視点画像が得られる。よって小型でカメラコストを抑えた自由視点画像生成装置が得られる。
(もっと読む)
3次元地図描画システム
【課題】 縮尺を保持した3次元地図を提供する。
【解決手段】 道路,建物などの地物を,3次元的に描画した地物データを予め用意し,このデータに基づいて3次元地図を描画する。地物データは,透視投影ではなく,現実の地物CST2を,投影方向PRJに沿う平行線で投影面PL2に投影する方法,つまり平行投影によって生成する。地物データは,平行投影した投影図を描画する2次元のラスタデータまたはポリゴンデータで備えられる。こうして用意された地物データを描画するだけで,レンダリングなどの負荷の大きい処理を行うことなく3次元的な地図を描画することができる。
平行投影では,透視投影と異なり,建物同士の位置関係や形状の縮尺が保持されるため,縮尺を保持した3次元地図を提供することができる。
(もっと読む)
情報処理プログラム、情報処理システム、情報処理装置および情報処理方法
【課題】仮想オブジェクトがあたかも現実空間に存在して移動しているという現実感をユーザに与えること。
【解決手段】移動オブジェクトと、高さが異なる部分を有する地形オブジェクトが仮想空間に配置され、移動オブジェクトは、地形オブジェクト上を移動するように制御される。撮像装置から実世界画像が取得され、当該実世界画像におけるマーカの位置および姿勢が検出される。当該検出結果に応じて仮想空間に仮想カメラが配置され、当該仮想カメラに基づいて移動オブジェクトおよび地形オブジェクトが描画される。このとき、撮像装置から取得された実世界画像が、地形オブジェクトのテクスチャとして用いられる。描画された移動オブジェクトおよび地形オブジェクトは、実世界画像上に合成されて、表示装置に表示される。
(もっと読む)
プログラム、情報記憶媒体、画像生成システム及びサーバシステム
【課題】立体視システムにおける適切なタイミング判定処理を実現できるプログラム、情報記憶媒体、画像生成システム及びサーバシステム等の提供。
【解決手段】画像生成システムは、移動体の制御を行う移動体制御部と、移動体を用いたタイミング判定処理を行う判定部と、立体視用画像を生成する画像生成部を含む。画像生成部は、タイミング判定処理に用いられる判定基準タイミングにおいて移動体の画像の視差が所定視差になるように、移動体が表示された立体視用画像を生成する。
(もっと読む)
被写地物の位置特定方法とそのプログラム、及び表示地図、並びに撮影位置取得方法とそのプログラム、及び撮影位置取得装置
【課題】本願発明の課題は、測量技師など人が被災地に立ち入ることなく地物位置(例えば、被災位置)や地物形状(例えば、被災規模)を把握する方法とそのプログラムを提供するとともに、撮影した写真によって写真撮影位置を特定できる方法と装置とそのプログラムを提供することにある。
【解決手段】本願発明の被写地物の位置特定方法は、被写地物の形状から4点以上の特徴点を選出するとともに、これら特徴点に対して座標を付与し、地表モデルを投影したモデル形状から特徴点に相当する点を4点以上選出するとともに座標を付与し、被写地物の特徴点とモデル形状の特徴点に相当する点とを対応させることで、写真平面内の任意座標系とモデル形状を表す平面内の任意座標系とを関連づけ、数値標高モデルに基づいて、被写地物に空間情報を付与し、当該被写地物の位置又は/及び形状を特定する方法である。
(もっと読む)
画像処理装置及び画像処理方法
【課題】より小さな回路規模で且つ小メモリー容量で視差生成を行なう。
【解決手段】1水平帰線区間を時分割して、左眼用画像1ラインL1が入力されると、ライン・メモリーmem0に一時的に格納する。同じ水平帰線区間の後半では右眼用画像1ラインR1が入力されると、この右眼用画像1ラインR1をそのまま出力すると同時に、ライン・メモリーmem0から左眼用画像1ラインL1の読み出しを行ない、多視点変換回路に出力する。サイド・バイ・サイド方式の信号であれば、ライン・メモリーを数本だけ持つことで、左眼用画像Lと右眼用画像Rのタイミングを合わせることが可能である。
(もっと読む)
161 - 180 / 1,135
[ Back to top ]