
Fターム[5B057BA15]の内容
Fターム[5B057BA15]に分類される特許
21 - 40 / 344
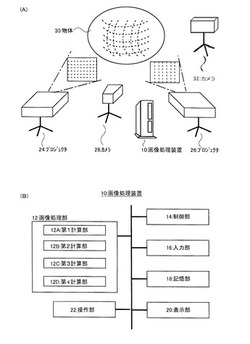
3次元形状の取得装置、処理方法およびプログラム
【課題】動きのある対象の形状を高密度かつ高フレームレートに計測可能な画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】画像処理装置10と、カメラ28、32と、プロジェクタ24と、プロジェクタ26とで、3次元空間中に存在する物体30の2次元画像を撮影し、撮影された2次元画像から物体の3次元形状を復元している。プロジェクタ24は物体30に対して横方向のパターンを照射し、プロジェクタ26は物体30に対して縦方向のパターンを照射している。そして、これらのパターンが物体30で反射したパターン光をカメラ28、32で撮影することで2次元画像を取得し、この2次元画像から画像処理装置10により3次元画像を復元している。さらに、カメラ28と32の整合性を調べることで3次元形状の精度向上が実現される。
(もっと読む)
画像処理方法および装置

【課題】高密度かつ高速に運動する物体の形状計測を可能にするための画像処理方法および装置を提供する。
【解決手段】投影装置により観測対象上に投影される、周期パターンからなる投影パターンを撮影装置により撮影し、投影パターンを含む入力画像から形状復元を行う画像処理方法において、投影装置より投影された投影パターンを撮影装置により撮影された入力画像から検出するステップと、検出された投影パターンの相対位相を検出するステップと、検出された投影パターンの絶対位相を、基準位置からの相対的な位相と、基準位置の絶対的な位相との和により表すと、複数の投影パターンの絶対位相により計算した奥行きが一致するという第1条件が検出された投影パターンの各画素について成立することに基づき基準位置の絶対的な位相を計算するステップとを備える。
(もっと読む)
画像信号処理装置、撮像システム、及び電子内視鏡システム
【課題】被写体を表示形態の異なる複数種類の画像で表示する画像信号処理装置において表示対象である狭帯域光画像のコントラストが低いこと。
【解決手段】画像信号処理装置を、所定の狭帯域光で照射された被写体を撮影した撮像装置からの画像信号が入力する画像信号入力手段と、撮影された被写体の表示モードを複数種類の表示モードの中から指定する表示モード指定手段と、各表示モードで用いられる複数種類のカラーマトリクス係数を記憶するカラーマトリクス係数記憶手段と、指定された表示モードに対応する複数種類のカラーマトリクス係数をカラーマトリクス係数記憶手段から取得するカラーマトリクス係数取得手段と、取得された各カラーマトリクス係数を用いて画像信号に対して夫々異なる色変換処理を行う色変換処理実行手段と、夫々異なる色変換処理が行われた各画像信号を合成して各画像信号に対応する画像が一画面内に並んで配置される合成画像を生成する合成画像生成手段と、から構成する。
(もっと読む)
画像生成方法及び装置、プログラム、記録媒体、並びに電子カメラ
【課題】ピントの合っていない領域が美しいボケになるようボケ画像を生成する。
【解決手段】画像処理部25は、ボケ処理部36、フォーカススタック像算出部37、PSFカーネル算出部38、及び画像先鋭化処理部39で構成されている。ボケ処理部36は、複数の多焦点画像に対して所望のピント位置から比例したボケ半径の円形開口、又はガウシアン等の任意のボケカーネルを用いてコンボリューション処理を行う。フォーカススタック像算出部37は、ボケ処理部36で処理を行った複数の画像に対して強度平均像又は強度平均の和のフォーカススタック像を算出する。画像先鋭化処理部39は、予め決めたフォーカススタックPSFカーネルに基づきフォーカススタック像をデコンボリューション処理して任意のボケ画像を生成する。
(もっと読む)
画像処理装置、撮像システム、画像処理システム
【課題】デジタル画像を利用した検体観察において、検体の奥行き方向の情報を維持し、且つコンピュータによる画像解析処理に適した画像を生成するための技術を提供する。
【解決手段】画像処理装置が、構造物を含む検体を焦点位置を変えながら撮像することにより得られた複数の原画像を取得する画像取得手段と、前記複数の原画像をもとに、原画像よりも構造物の像のボケが低減された第1の画像を生成する画像生成手段と、前記第1の画像に対し画像解析処理を適用することによって、前記第1の画像に含まれる構造物に関する情報を取得する解析手段と、を備える。前記画像生成手段は、前記検体から得られた前記複数の原画像の内から、前記検体の厚さよりも小さい深度範囲内に焦点位置が含まれる原画像を選択し、前記選択された原画像を用いて前記第1の画像を生成する。
(もっと読む)
画像処理装置および画像処理方法、プログラム
【課題】多視点画像データに基づいて自然なボケ味のある出力画像を出力する。
【解決手段】ユーザはリフォーカスパラメータ設定することができる。多視点画像データとリフォーカスパラメータとに基づいて、画像データを画像合成可能な領域(合成領域)と画像合成不可な領域(非合成領域)とに分割し、画像中の各ブロックごとに合成可能領域か合成不可領域かを設定する。画像合成可能な領域に対して、画像合成処理を行う。
(もっと読む)
内視鏡システム、プロセッサ装置及び画像補正方法
【課題】励起光と蛍光の配光分布の違いによって生じる観察画像内の色むらを低減する。
【解決手段】照射部は、青色のレーザ光を発光するレーザ光源と、レーザ光によって励起されて、緑色〜赤色の蛍光を発光する蛍光体とからなり、蛍光と蛍光体を透過する青色レーザ光の一部の混色により白色の照明光を照射する。レーザ光は指向性が高く、蛍光は拡散性が高いため、両者の配光分布には違いが生じる。観察画像に対して画像処理を施すことにより、両者の配光分布の違いによって観察画像に生じる色むらを補正する。
(もっと読む)
画像復元装置およびその方法
【課題】 撮像光学系の設計上の光学特性、および、撮像光学系の実際の光学特性を考慮した画像復元処理を実現する。
【解決手段】 画像復元装置は、撮像光学系の設計データより求まる光学特性に基づいて作成された画像復元フィルタを保持する。そして、設計データより求まる光学特性と実際の撮影に使用する撮像光学系の光学特性との差異情報から、設計データに基づく画像回復フィルタを再構成した補正フィルタを用いて画像復元処理を行う。
(もっと読む)
外観投影装置を用いてロボットの動作を決定するロボットシステム
【課題】ワークの位相を容易に検出して、ワークの位相を補正する。
【解決手段】ロボットシステムは、周方向に延びる側面を有する被検出物(4)を把持する把持機構を備えたロボット(1)と、被検出物をその中心軸線の方向に挿入可能な開口部(7)、および被検出物を挿入する挿入方向において開口部から半径方向外側に向かって広がる鏡面加工された湾曲した内面(8)を含む外観投影装置(5)と、被検出物が開口部に挿入されたときに湾曲した内面に投影された被検出物の像を撮像する撮像装置(12)と、撮像装置により撮像された被検出物の像を画像処理して、被検出物の側面に備えられた位相特徴部(6)を検出するか、または被検出物の側面を検査する画像処理部(21)とを含む。
(もっと読む)
画像処理装置、画像認識装置及び方法
【課題】適用範囲が広く、ステレオ画像認識処理に必要なステレオキャリブレーションの自動化に有効な画像処理装置を提供する。
【解決手段】本実施形態によれば、画像処理装置は、画像取得部と、特徴量抽出部と、対応検出部と、算出部とを備えた構成である。画像取得部は、複数のカメラから共通撮影領域に対応する画像データを取得する。特徴量抽出部は、前記カメラ毎の画像データから前記共通撮影領域の特徴量情報として、前記共通撮影領域に存在する同一の実像に基づいた少なくとも2つの平面上パターンを算出する。対応検出部は、前記2つの平面上パターンにおいて前記カメラ毎の画像データ間の対応関係を検出する。算出部は、前記対応検出部により算出された対応関係情報に基づいて、前記カメラ毎の画像間の画像変換パラメータ情報を算出する。
(もっと読む)
通行監視システム
【課題】複数の監視カメラを用いることなく監視カメラの死角を解消することにより、立入制限エリアへの非許可者の不正侵入を確実に監視し得る通行監視システムを得る。
【解決手段】通行監視システムは、所定の出入口の近傍領域を第1方向から撮影するカメラ1と、カメラ1の画角内において、第1方向とは異なる第2方向から出入口の近傍領域が映るように配置された鏡11と、カメラ1によって撮影された映像内の鏡11に映し出された第1映像と、カメラ1によって第1方向から出入口の近傍領域を撮影した第2映像とに基づいて、出入口を通行する人物が一か複数かを判定する処理部4とを備え、処理部4は、第1映像に基づき第1のアルゴリズムを用いて人物の単複判定を行い、第2映像に基づき第1のアルゴリズムとは異なる第2のアルゴリズムを用いて人物の単複判定を行う。
(もっと読む)
画像処理装置、その処理方法及びプログラム
【課題】
対象物体が表示されたボディマーク上に、異なる形状で撮像された当該対象物体における注目領域を合成して表示できるようにした技術を提供する。
【解決手段】
画像処理装置は、第1の形状の対象物体を表すボディマーク上に該対象物体における注目領域の位置を表示する。ここで、画像処理装置は、第1の形状とは異なる第2の形状の対象物体の画像を取得する画像取得手段と、第2の形状の対象物体における注目領域の位置を、第1の形状の前記対象物体における対応位置に変換する変換手段と、当該変換された注目領域の位置をボディマーク上に表示する合成手段とを具備する。
(もっと読む)
目視される物体の表面に関する3次元データの品質の指示を表示するための方法およびデバイス
【課題】目視される物体の表面に関する3次元データの品質の指示を表示するための方法およびデバイスを提供する。
【解決手段】目視される物体202の表面210の画像500を獲得して、表示するステップであって、画像500の複数のピクセル231、232、233、234は、目視される物体202上の複数の表面ポイント221、222、223、224に対応する、ステップと、複数の表面ポイントに対応する複数のピクセルの各ピクセルに関して、ピクセルに対応する表面ポイントに関する3次元座標が利用可能性であるかどうかを判定するステップと、ピクセル231に対応する表面ポイント221に関する3次元座標が利用可能でない各ピクセル231に関する第1のオーバーレイ250を表示するステップとを備える方法。
(もっと読む)
Hilbert位相画像処理のためのシステムと方法
【課題】細胞内で起こる高速現象を測定する装置を提供する。
【解決手段】ヒルベルト位相顕微鏡を使用し、透光性物体に関連した高解像度位相情報から、一フレーム毎の形状、体積のようなパラメータを得、ミリ秒の時間スケールで取得した多数の画像をもとに、ダイナミックな変動をナノメートルオーダーの分解能で定量化する。
(もっと読む)
撮像装置および方法、並びにプログラム
【課題】光学ブロック部の歪曲収差および色収差の補正にあたり、必要とされるラインメモリのライン数を低減する。
【解決手段】レンズなどを構成する光学ブロック部11を設計する際、歪曲収差を最小、または最小近傍に設定することにより、歪曲収差の補正に必要とされるフィルタタップ数を最小、または、最小近傍にすることができる。このため、フィルタタップ数に比例してラインメモリのライン数を低減させることができる。結果として、ラインメモリのライン数を低減させることができる分だけ、装置コストを低減させることが可能となる。本技術は、撮像装置に適用することができる。
(もっと読む)
認識対象物、対象物認識装置およびプログラム、対象物認識システム
【課題】撮像される認識対象物の予め定められた位置に設けられ、共通平面上に位置する一の識別部と、他の識別部と、を有し、一の識別部を撮像可能な前記共通平面の法線方向に対して予め定められた角度範囲の一部からは他の識別部が撮像されることを抑制する、認識対象物を提供することにある。
【解決手段】撮像される認識対象物であって、予め定められた位置に設けられ、共通平面上に位置する少なくとも3の第一識別部からなる第一識別部群と、前記第一識別部群の位置に基づいて定められる位置に設けられた少なくとも1の第二識別部と、を備え、前記第一識別部は、前記共通平面の法線方向に対して予め定められた角度範囲0〜θ1度にて撮像され、前記第二識別部は、前記共通平面の法線方向に対して予め定められた角度範囲0〜θ2度にて撮像され、θ1とθ2とは、θ1>θ2の関係を有する、ことを特徴とする認識対象物。
(もっと読む)
瞳孔径検出装置
【課題】眼瞼の下垂等による瞳孔径の欠けがあっても正確な瞳孔径を検出できる瞳孔径検出装置を提供する。
【解決手段】眼球に向けて光を発して患者の眼球を撮影し(ステップS1)、眼球画像から瞳孔部分を抽出し(ステップS2)、抽出された瞳孔を含む画像領域を水平方向に走査して情報をライン毎に記録し(ステップS3)、極大値を検出し(ステップS4)、瞳孔径を検出する前に開瞼した状態で撮像した検出前眼球画像と、瞳孔径を検出するために撮像された検出用眼球画像とを比較して、瞳孔径を推定する。
(もっと読む)
画像処理装置、画像処理プログラム、画像処理方法及びそれを用いた撮像装置
【課題】製造ばらつきによって回転非対称に発生する像面湾曲を補正して高画質な画像を取得することが可能な画像処理装置および画像処理方法を提供する。
【解決手段】撮像画像に対して画像処理を行う画像処理装置20は、色ずれ量を検出する色ずれ検出部22と、画像の原点に対して対称な位置における色ずれ量と前記画像の原点に対して対称な位置における像面湾曲に関するぼけ量、との関係を記憶する記憶部24と、前記記憶部に記憶された前記関係から、前記検出部が検出した前記色ずれ量に対応する前記像面湾曲に関するぼけ量を取得する非対称特性取得部23と、非対称特性取得部が取得した像面湾曲に関するぼけ量を補正するように原点に対して非対称に画像処理を行うフィルタリング処理部27と、を有する。
(もっと読む)
撮像装置
【課題】高い解像度を確保しつつ、コントラストおよび精鋭度の低下を防止することが可能な撮像装置を提供すること
【解決手段】撮像装置は、前記光学像と前記撮像素子の一方が他方に対して移動した後に撮像素子から画像信号を取得し、複数回の撮像によって取得した複数の画像信号を統合して各画像信号よりも高解像度の画像信号を生成し、撮像素子の開口部と画素ピッチのサイズはそれぞれ制限されている。
(もっと読む)
微細非周期パターン投影装置および方法とそれを用いた三次元計測装置
【課題】ユニークな特徴をもつ非周期パターンを投影して、なめらかな表面をもつ物体の三次元形状を計測する。
【解決手段】2種の菱形で構成した非周期パターン模様をワークに投影しステレオカメラで計測する。
(もっと読む)
21 - 40 / 344
[ Back to top ]