
Fターム[5B057DA15]の内容
Fターム[5B057DA15]に分類される特許
181 - 200 / 897
車両周辺監視装置
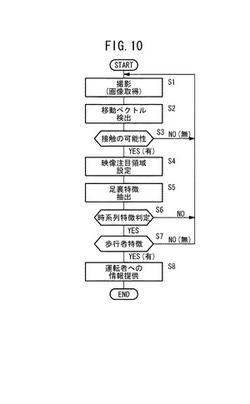
【課題】背景と歩行者との間の輝度差が小さく、グレースケール画像上でコントラスト差が小さい高温環境下での赤外線グレースケール画像及びその2値化画像上で、歩行者の認識精度を向上する車両周辺監視装置を提供する。
【解決手段】車両12の赤外線カメラ16により取得されるグレースケール画像を2値化画像に変換し、該2値化画像から対象物である歩行者を認識する際、高外気温下でも輝度の高い歩行者の足裏特徴を記憶する足裏特徴記憶手段と、前記2値化画像中の対象物が、前記足裏特徴を含むかどうかを判定する類似性判定手段と、該類似性判定手段により前記足裏特徴が含まれていると判定されたとき、前記対象物を歩行者であると認識する歩行者認識手段と、を備える。
(もっと読む)
眠気検出装置、眠気検出方法、及びプログラム

【課題】下方視を覚醒度低下(眠気)と誤検出する可能性を減らすことで、眠気検出の精度を向上させる。
【解決手段】眠気検出装置10は、対象人物の目が眠り目であるか否かを判断する第1判断部12と、対象人物のまぶたの動きが生じた直後に、顔向き角度の変化が生じたか否かを判断する第2判断部13と、第1判断部12及び第2判断部13の判断結果に基づいて対象人物の眠気を検出する眠気検出部14と、を備える。そして、対象人物の眠気を検出した場合には警報を発する。
(もっと読む)
動体検出装置および照明装置
【課題】検知エリアの照度が低い場合でも人体の検出を確実に行う。
【解決手段】動体検出装置2は、所定のエリアAに入った動体を検出する検出手段8と、少なくとも所定のエリアA内に放射光を照射する光源9と、検出手段8が動体を検出したときに光源9を点灯させる点灯制御装置10と、所定のエリアAの輝度分布を画像として出力するイメージセンサ11と、前記画像に基づいて、検出手段8で検出された動体が予め設定された検出目的物であるか否かを判断し、当該判断結果を出力する画像処理装置12を具備している。
(もっと読む)
車両検出装置、車両検出プログラム、および車両検出方法
【課題】 ミリ波レーダと画像センサを併用することにより、自車両周囲の前方車及び対向車を検出することを可能とする車載型の車両検出技術を提供する。
【解決手段】
発明の一態様は、撮像装置で取得した画像内において前記位置取得センサから取得した複数の車両候補点に対応する位置を算出し、その周囲を画像処理領域とし、位置取得センサより出力される距離情報と所定の車種パターンに基づいて種々のサイズのウィンドウを画像処理領域内に作成し、該ウィンドウに対し、車両形状モデルを用いて識別処理を行い、車両の存在を示す候補ウィンドウを判定し、候補ウィンドウを所定の条件と照合し車両領域を確定し車両位置を出力することを特徴とする。
(もっと読む)
省電力化装置および省電力化方法ならびに制御装置および防犯装置
【課題】 客と店員の判別が可能で、かつ複数の省電力化対象装置の電源制御が可能な省電力化装置の提供。
【解決手段】 省電力化装置1は、カメラ10および画像認識部11を用いて認識される人物の服装画像と、メモリ12に記憶される人物の服装画像とを比較して、省電力化対象装置の電源制御を必要とする人物と必要としない人物とを判別し、その判別結果に基づいて電源制御コマンドを送信する制御部13と、制御部13からの電源制御コマンドを受信し、その電源制御コマンドに基づき省電力化対象装置の電源制御を行う操作部52とを含む。
(もっと読む)
外界認識装置
【課題】処理負荷の低減と検出精度の向上を図ることができる外界認識装置を提供する。
【解決手段】車両10に設置された複数のカメラ201〜203で撮像される車両周囲の画像を利用して認識対象Pを認識する外界認識装置は、入力されるパラメータに応じて、前記各画像の座標変換と合成を行い、合成画像を作成する合成変換部104と、合成変換部104で作成された合成画像に対して画像処理を行い、認識対象を認識する認識部と105と、認識部105によって認識された認識結果に基づいてパラメータを生成するパラメータ生成部108を有する。
(もっと読む)
移動体検知装置および移動体検知方法
【課題】光量が十分でない環境において非発光の移動体を検知する装置および方法を提供する。
【解決手段】移動体検知装置は、画像取得部、差分画像生成部、算出部、および警告出力部を備える。画像取得部は、カメラにより撮影された1または複数の画像から生成される第1の画像、および前記カメラにより前記1または複数の画像よりも後に撮影された第2の画像、を取得する。差分画像生成部は、前記第1の画像の各画素値から前記第2の画像の対応する各画素値をそれぞれ引算して差分画像を生成する。算出部は、前記差分画像において所定の閾値レベルを越える画素値を有する画素の数に基づいて隠蔽パラメータを算出する。そして、警告出力部は、前記隠蔽パラメータが所定の条件を満たすときに警告を出力する。
(もっと読む)
自動車用の障害物検知方法
【課題】自動車の環境における障害物の検知方法を提供する。
【解決手段】画像処理により障害物の第1の検知を行って、少なくとも1つの対象領域を定義することと、所定の特徴に対して対象領域に付与される信頼性指数によって、検知された障害物を分類することと、1つまたは複数のセンサにより第1の閾値未満の閾値範囲で障害物の第2の検知を行って、所定の位置を得ることと、所定の位置を基準目印に投影することと、対象領域を前記基準目印に投影することと、得られた2個の投影を対応させて、この対応に応じて、分類された障害物に所定の位置を割り当てることと、の各ステップを備える。
(もっと読む)
運転支援装置
【課題】駐停車の際のドアの開閉が分かりやすく、搭乗者の利便性に優れた運転支援装置を得る。
【解決手段】車両のデータを記録した車両DB3と、データ解析部5と、表示生成部6とを備える。データ解析部5は、車両の周辺の障害物を検出する障害物検出部4からの障害物データ及び車両DB3からの車両データを用いて、車両並びにこの車両の全開時のドア及びこのドアの開閉の軌跡と、障害物との距離及び位置を算出する。表示生成部6は、データ解析部5からのデータと車両データと障害物データとを用いて、少なくとも1つの方向から見た、ドアを開けた車両及びこのドアの開閉の軌跡並びに障害物の画像を生成し、表示部8に表示するものである。
(もっと読む)
車線区画線検出装置、車線区画線検出方法、及び車線区画線検出プログラム
【課題】ノイズが存在する場合でも、正確に車線区画線を検出することのできる、車線区画線検出装置、車線区画線検出方法、及び車線区画線検出プログラムを提供する。
【解決手段】走行路を走行する走行体から前記走行路を撮像して得られた原画像を取得する、原画像取得手段と、前記原画像に基づいて、前記走行路に含まれる車線区画線の前記走行体からの相対位置を検出する車線区画線位置検出手段と、時刻t0における原画像である第1画像の部分画像と、前記時刻t0よりも過去における前記原画像である過去画像の前記部分画像とに基づいて、車線区画線位置検出手段における検出結果を検定する、検定手段とを具備する。
(もっと読む)
縦列駐車案内装置
【課題】縦列駐車を行うに際して、最終的に後方車両が自車両の存在に関わらず円滑に発車することができ、また自車両が円滑に発車できる間隔を適切に且つ容易に確保できる「縦列駐車案内装置」とする。
【解決手段】縦列駐車時に後方を撮影するリアカメラの画像をモニタ表示する際、自車両と後方車両の間隔が、後方車両が円滑に駐車位置から脱出できる間隔を示す縦列駐車後方案内マークを表示し、運転者はそのマークに後方車両の画像の下端部分がほぼ一致するように駐車する。それにより自車両の縦列駐車後に前方に他車がほとんど間隔を置かずに駐車した時でも、後方の間隔分だけ後退すると円滑に発車できる。後方車両との間隔は、リアカメラ撮影画像で後方車両の車種を認識し、車種に応じた最小回転半径等の車両データで、後方車両が円滑に発車できる間隔を求め、その間隔位置にマークを表示しても良い。
(もっと読む)
制御対象物抽出装置および車両制御装置
【課題】制御対象物抽出装置において、マンホール等、先行車両の陰に入りうる物体であって制御対象物とすべきでない物体を確実に制御対象物から除外することができる技術を提供する。
【解決手段】車両制御システムにおいては、不要物体判定処理にて、監視対象領域に存在する1または複数の物体のうちから自車両に対して先行して走行する先行車両を抽出し、監視対象領域のうちの自車両と先行車両との間の領域である車両間領域に位置する1または複数の物体である対象物候補を抽出する(S420,S440)。さらに、各対象物候補のうちの追跡が開始されてからの時間を表す追跡時間が予め設定された追跡基準時間以上である対象物候補を制御対象物として抽出するよう設定し、追跡時間が追跡基準時間未満である対象物候補を制御対象物として抽出しないよう設定する(S510,S530,S570,S590)。
(もっと読む)
駐車時における運転支援装置及び方法
【課題】簡単な演算処理及び装置構成により駐車枠線に対する自車両の姿勢を検出可能とした駐車時における運転支援装置及び方法を提供することが課題である。
【解決手段】車両100に搭載された撮像装置1により撮像された車両後方の広角撮像画像を用いて、駐車スペース30の左右駐車枠線L1、L2に対する自車両姿勢を検出する駐車時における運転支援装置であって、前記撮像画像から前記左右駐車枠線L1、L2に該当する2本の線形画像を抽出する駐車枠線検出手段と、前記撮像画像の水平方向若しくは垂直方向に対する前記2本の線形画像の傾きθ1とθ2を算出し、該傾きθ1とθ2の相対関係に基づいて前記左右駐車枠線L1、L2に対する車体平行度を検出する車体平行度検出手段と、を備える。
(もっと読む)
画像処理装置、画像形成装置、画像処理方法、コンピュータプログラム及び記録媒体
【課題】取得画像データに、地紋パターンを表す地紋データを付加する処理を行う画像処理において、得られる原稿が複写される際に現れるべき地紋パターンがはっきり顕在しない問題が生じる虞がある場合は、斯かる問題の発生を未然に防止出来る画像処理装置、画像形成装置、画像処理方法、コンピュータプログラム及び記録媒体を提供する。
【解決手段】濃度検出部102が取得画像データの下地領域の濃度を検出し、判定部103によって、その結果が所定の濃度値より高いか否かが判定され、例えば、所定の濃度値より高いと判定された場合は、地紋データを付加する処理を実行しない、又は通知部104がその旨を外部に通知する。
(もっと読む)
周辺表示装置
【課題】自動車などの移動体において周辺の俯瞰画像を表示する場合に、オクルージョン領域の存在を考慮した表示を可能とする周辺表示装置を提供する。
【解決手段】画像処理装置10は、画像データを取り込む画像取得部11と、画像データに基づいて3次元情報を計測する3次元情報計測部12と、画像データの視点位置を変更した視点位置変更画像を作成する視点位置変更画像生成部14と、3次元情報計測部12で計測された3次元情報に基づいて、視点位置変更画像上の3次元情報から障害物のある領域と推定される障害物領域を判定するとともに、その周辺で3次元情報を取得不能な領域を危険領域と判定する危険領域判定部13と、危険領域判定部13での判定結果に基づいて、視点位置変更画像上の危険領域等にマーキングを行う重畳情報画像生成部15と、視点位置変更画像を合成する視点位置変更画像合成部16とを備えている。
(もっと読む)
障害物検出装置および障害物検出方法
【課題】超音波センサ等を用いず画像認識処理だけで、車両周囲に広がる壁を障害物として検出できる「障害物検出装置および障害物検出方法」を提供する。
【解決手段】4方向の撮影領域の車両周囲画像について障害物検出部25により障害物の検出処理を行った結果、ある撮影領域の車両周囲画像から障害物が検出されなかった場合であっても、その撮影領域に隣接する撮影領域の車両周囲画像について、隣接する撮影領域どうしの重複領域において障害物が検出されていると重複領域判定部26により判定されたときには、障害物が検出されなかった車両周囲画像の撮影領域に障害物が存在するとみなすことにより、ある撮影領域の車両周囲画像に写っている壁を障害物として検出できない場合でも、他の車両周囲画像の重複領域での障害物の検出結果を補助的に用いて、壁を障害物として検出できるようにする。
(もっと読む)
走行支援装置および走行支援方法
【課題】自車両が走行する走路に、物体が飛び出す可能性を適切に算出することができる走行支援装置を提供する。
【解決手段】車両前方を撮像する撮像手段10と、撮像した画像の情報に基づいて、画像中で移動した物体のエッジ成分を抽出する抽出手段と、画像中の所定領域において、抽出手段により抽出されたエッジ成分に対応する画素が複数連続してなる画素列を構成する各画素のうち、高さ方向において最も下側に位置する画素の位置を最下点位置として検出する最下点位置検出手段と、車両の進行方向に沿って、最下点位置同士を結ぶ直線を、自車両が走行する走路の境界線として検出する境界線検出手段と、を備える走行支援装置において、最下点位置に基づいて、自車両の進行方向の空間と交差する空間である交差空間を検出する交差空間検出手段と、検出された交差空間に基づいて、自車両が走行する走路上に、物体が飛び出す可能性を算出する算出手段と、を有することを特徴とする走行支援装置。
(もっと読む)
情報処理装置、方法及びプログラム
【課題】表示部の画面に対する第三者の盗み見を、簡単かつ精度よく検出する。
【解決手段】カメラデバイス11は、使用者が表示デバイス15の画面を見ている時に、画面側から使用者側を撮影する。顔検出手段12は、カメラデバイス11によって撮影された画像の中から、人の顔を検出する。盗み見判定手段13は、顔検出手段12によって検出された顔の大きさに基づき、第三者が盗み見をしているか否かを判定する。盗み見防止信号出力手段14は、盗み見判定手段13によって盗み見をしていると判定されたときに、盗み見防止信号Sを出力する。表示デバイス15は、盗み見防止信号出力手段14から出力された盗み見防止信号Sを入力すると、盗み見を防止する動作をする。
(もっと読む)
防犯装置、その制御方法、プログラム、及び防犯システム
【課題】
商品盗難の中でも特に大量盗難を検出できるようにした防犯装置、その制御方法、プログラム、及び防犯システムを提供する。
【解決手段】
防犯システムにおいては、サイズの異なる複数の商品群を監視カメラで撮影し、当該監視カメラで撮影された撮影映像内の商品群に対して商品のサイズに応じたサイズ別検出用エリアをそれぞれ設定する。ここで、撮影映像内において、人間が検出されると、人間検出前の撮影映像と、人間検出後、人間未検出となった時点の撮影映像とを比較し、当該比較結果に基づいてサイズ別検出用エリア毎に当該エリア内の商品が盗難されたか否かを判定する。
(もっと読む)
特定の対象物品の識別のためのX線断層撮影検査システム
本明細書が開示するX線走査システムは、対象物の断層撮影X線画像を規定する走査データを生成する非回転式X線走査装置と、プログラム命令を実行するプロセッサとを備え、実行するプロセッサは、走査データを解析して、断層撮影X線画像の少なくとも1つのパラメータを抽出し、プロセッサは、対象物が液体、鋭利な対象物、薬物、紙幣、核物質、シガレット、または小火器を含むかどうかを判定するように構成される。 (もっと読む)
181 - 200 / 897
[ Back to top ]