
Fターム[5F031GA47]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 動作 (3,504) | アームが回転 (1,258)
Fターム[5F031GA47]に分類される特許
41 - 60 / 1,258
ロボットのアーム構造およびロボット
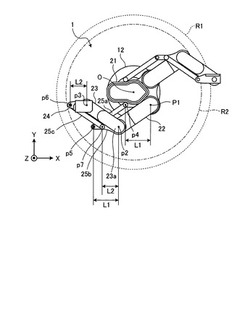
【課題】ロボットの最小旋回径を小さくすること。
【解決手段】実施形態に係るロボットは、第1アーム部、第2アーム部、中間リンク部、第1リンク部および第2リンク部を備える。第1リンク部は、第1アーム部と中間リンク部と固定ベース部との間で第1平行リンク機構を形成する。第2リンク部は、第2アーム部と中間リンク部と可動ベース部との間で第2平行リンク機構を形成する。そして、第2リンク部と中間リンク部との連結軸から第1アーム部と第2アーム部との連結軸までの距離は、第2リンク部と中間リンク部との連結軸から第1アーム部と第2アーム部との連結軸までの距離よりも短い。
(もっと読む)
基板処理装置

【課題】基板搬送を効率良く行うことで、基板処理のスループットを向上する技術を提供する。
【解決手段】基板9を処理する基板処理装置100である。基板処理装置100は、外部から基板を受け入れる基板受入部1と、基板9に処理液を塗布する塗布部2と、処理液が塗布された基板9を乾燥させる乾燥部3と、基板9を外部に払い出す基板払出部4とを備えている。また、基板処理装置100は、基板受入部1にある複数の基板9を同時に塗布部2に搬送する搬送機構5と、塗布部2において処理液が塗布された複数の基板9を同時に乾燥部3へ搬送する搬送機構6と、乾燥部3にて乾燥された複数の基板9を同時に基板払出部4へ搬送する搬送機構7とを備えている。
(もっと読む)
基板姿勢変更装置および基板処理装置
【課題】基板姿勢変更装置の製造コストを低減すること。
【解決手段】基板姿勢変更装置5は、基板Wを保持している状態で回転軸線L1まわりに回転可能であり、基板Wを保持している状態での重心GCの位置が回転軸線L1に対してずれている保持ユニット6と、回転軸線L1まわりの回転角が異なる複数の位置で保持ユニット6の回転を停止可能であり、前記複数の位置で保持ユニット6を保持可能な回転停止ユニット17と、回転軸線L1に交差する交差方向D1に保持ユニット6を移動させ、交差方向D1に保持ユニット6を加速または減速させる走行ユニット9とを含む。
(もっと読む)
基板処理システム
【課題】作業効率の低下を防止する基板処理システムを提供する。
【解決手段】基板処理を実行する基板処理装置と、前記基板処理装置から、前記基板処理装置に関する情報を一括取得する群管理装置と、前記群管理装置を介して、前記基板処理装置に関する情報を取得する端末装置とからなる基板処理システムであって、前記端末装置の操作者に関する情報と、前記端末装置における前記基板処理装置に関する情報の表示に関する情報とを記憶する記憶手段と、前記記憶手段に記憶された、前記端末装置の操作者に関する情報と、前記端末装置における前記基板処理装置に関する情報の表示に関する情報とに基づいて、前記端末装置における前記基板処理に関する情報の表示を制御する制御手段とを有する。
(もっと読む)
基板搬送装置、基板処理システムおよび基板搬送方法、ならびに記憶媒体
【課題】真空において熱をともなう処理を行う基板処理装置において、基板を高速で搬送しても基板の位置精度を高くすることができること。
【解決手段】熱をともなう真空処理が行われる真空処理ユニットに対して基板の搬入および搬出を行う基板搬送装置は、基板を位置決めする位置決めピンを有し、基板を位置決めした状態で保持するピックと、ピックにより真空処理ユニットに対して基板を搬入および搬出するようにピックを駆動させる駆動部と、ピックによる基板の搬送動作を制御する搬送制御部とを有し、搬送制御部は、基板を真空処理ユニットに搬入する際の、常温における基板の基準位置情報を予め把握しておき、実処理において、基板を真空処理ユニットに搬入する際に、その基板の基準位置からの位置ずれを算出し、位置ずれを補正して基板を真空処理ユニットに搬入するように駆動部を制御する。
(もっと読む)
物品搬送設備
【課題】物品保管部の設置箇所に制限を受けることなく、物品保管部の構成の簡素化を図り、入庫作業と出庫作業とを連続して行う場合にその作業にかかる時間の短縮化を図る。
【解決手段】第1授受位置J1と物品保管部6の内部との間で物品3を搬送する第1搬送コンベヤ37と、第2授受位置J2と物品保管部6の内部との間で物品3を搬送する第2搬送コンベヤ38とが備えられ、物品搬送車2は、走行レール1の経路上の授受用停止位置に停止した状態で、把持部4の昇降を行って第1授受位置J1及び第2授受位置J2の一方との間で物品3を移載自在であり、且つ、授受用停止位置に停止した状態で、把持部4のスライド移動を行って第1授受位置J1及び第2授受位置J2の他方との間で物品3を移載自在に構成され、第1搬送コンベヤ37と第2搬送コンベヤ38の一方が入庫部7として構成され、他方が出庫部8として構成されている。
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】装置自体の有する能力を超えた処理条件が設定されるのを防止することができる基板処理装置及び半導体装置の製造方法を提供するを提供する。
【解決手段】基板処理装置は、ウエハを格納し、真空排気可能な少なくとも1つの真空容器と、この真空容器にガスを供給するガス供給部と、開度を調整することにより真空容器内からの排気量を制御するAPCバルブと、真空容器内の圧力を、ガス供給部によるガス供給量とAPCバルブの開度とに対応付けて記憶する記憶部と、操作者から所定の圧力、ガス供給量、及び開度に関する指示を受付ける受付部と、受付部が受付けたガス供給量の範囲及び開度の範囲のうち、受付部が受付けた所定の圧力に対応する記憶部が記憶するガス供給量の範囲及び開度の範囲に含まれる範囲を算出する算出部と、算出部が算出した範囲を表示する表示部と、を有する。
(もっと読む)
基板搬送装置、半導体製造装置、及び基板搬送方法
【課題】 反りと反発力の大きいウェハであっても、確実に吸着して保持しながら搬送することができる搬送技術を提供することを課題とする。
【解決手段】 基板搬送装置は、基板を吸着保持しながら搬送する搬送ピック40を有する。搬送ピック40の吸着面40aは複数の領域46a,46bに分割され、複数の領域の各々に対して吸着経路が設けられる。制御部60は、吸着経路への負圧の導入を制御して、搬送ピック40による基板の吸着保持動作を制御する。
(もっと読む)
ウエハ搬送装置
【課題】複数の検査室によって共有することによりフットプリントを削減することができるウエハ搬送装置を提供する。
【解決手段】本発明のウエハ搬送装置10は、筐体Fを収納するウエハ収納室11と、ウエハ収納室11の下側に配置されたプリアライメント室12と、ウエハ収納室11及びプリアライメント室12に沿って上下方向に配置され且つウエハ収納室11とプリアライメント室12との間で半導体ウエハを搬送する第1のウエハ搬送機構13を有する第1のウエハ搬送室14と、第1のウエハ搬送室14とでプリアライメント室12を挟む位置に配置されアライメント室15と、第1のウエハ搬送室14、プリアライメント室12及びアライメント室15の配列方向に沿って移動すると共に上下方向に移動する第2のウエハ機構16を有する第2のウエハ搬送室17と、を備えている。
(もっと読む)
熱処理装置、及びこれに基板を搬送する基板搬送方法
【課題】基板搬送効率を向上できる熱処理装置を提供する。
【解決手段】複数の基板が互いに第1の間隔をあけて重なるように複数の基板を収容する基板容器が載置される容器載置部と、第1の間隔よりも狭い第2の間隔をあけて複数の基板が互いに重なるように複数の基板を保持する基板保持具と、基板支持可能な少なくとも2つの基板支持部を含み、基板保持具と基板容器との間で複数の基板を受け渡す基板搬送部であって、少なくとも2つの基板支持部が、第1の間隔で互いに重なるように配置され、基板容器に対して共に進退し、基板保持具に対して独立に進退する基板搬送部と、少なくとも2つの基板支持部のうちの下方の基板支持部が基板を支持しているときに、上方の基板支持部が動作しないように上方の基板支持部を制御する制御部とを備える熱処理装置により上記の課題が達成される。
(もっと読む)
基板保持機構、半導体基板の分離処理装置および半導体基板の分離方法
【課題】 極めて簡単な構成で液中でも半導体基板を安全かつ確実に保持でる半導体基板の保持機構を提供し、さらに、ウエット状態で密着した半導体基板同士を破損することなく自動的に、高速で分離し、保持して搬送することが可能な半導体基板の保持装置とこれを用いた分離装置および分離方法を提供する
【解決手段】チャック本体110に2以上の液体流入口113とこの液体流入口に接続されている中空円筒状のノズル本体120とを有し、前記ノズル本体にはその前端を閉鎖する蓋121とこの蓋から僅かに離れた位置に径方向に向けて開口形成された吐出口122を有し、吐出口から排出された流体の流路に所定角度に傾斜した斜面を有する液流規制部119を有し、前記液流規制部の外周に基板面と平行な平坦部118を有し、前記平坦部の一部領域に半導体基板に接するように突出した保持部材125が配置されている構成の基板保持機構とした。
(もっと読む)
ダイボンディング装置
【課題】簡便な構造で薄い半導体チップを適切にピックアップしてボンディングする。
【解決手段】半導体チップをピックアップしてボンディングするボンディングツール11が先端に取り付けられるシャフト12、複数の平行に配置された平板リンク20,30を介してシャフト12が取り付けられ、シャフト12の延びる方向に沿って直線移動するボンディングヘッド50と、ボンディングヘッド50に回転自在に取り付けられ、先端部41がシャフト12に接続され、後端部43にカウンターウェイト48が取り付けられるレバー40と、ボンディングヘッド50とレバー40の後端部43との間に取り付けられ、ボンディングツール11を半導体チップに押し付ける押圧荷重を付与するスプリング58と、を備え、カウンターウェイト48は、レバー40の回転軸周りの回転モーメントをつり合わせる重量とする。
(もっと読む)
冷却ユニット及びこれを用いたワーク搬送装置
【課題】高温状態のワークからの輻射熱による前記ワークの周辺部品に対する影響を減少させることができ、且つ冷却媒体が漏れたり真空リークが発生したりすることがなく、また、コストの減少させることができ、また、ワーク搬送機構の旋回角度を規制することがない冷却ユニットを提供する。
【解決手段】冷却ユニット100は、その外壁部122がワーク搬送機構20の被冷却面Pに密着した状態でワーク搬送機構20に取り付けられ、被冷却面Pから外壁部122を介して伝導された熱によって下側空間S1に収容された冷却媒体を蒸発させ、冷却媒体が蒸発する際に奪われる気化熱によって外壁部122を介して被冷却面Pを冷却し、下側空間S1の内部の蒸気圧が一定以上になると蒸気放出ユニット130によって下側空間S1の内部の蒸気を真空室に放出する。
(もっと読む)
搬送ロボット
【課題】ロボットアームの伸縮過程で湾曲による鉛直方向に沿った高さ位置の変動を抑制し、かつ、軽量化も可能な搬送ロボットを提供する。
【解決手段】ロボットアーム11は、それぞれのアーム部21a、21bの長手方向Lに沿った全長のうち少なくとも一部は、長手方向Lに対して垂直な方向に広がる断面の形状が長方形を成す第一領域E1と、この長方形の一方の長辺W1から直角な方向に向けて突出した第二領域E2とからなる形状に形成されている。例えば、第一領域E1を成す長方形の一方の長辺W1の中央部分を中心にして、矩形の第二領域E2が突出しているような、断面が略T字型となるように形成されていれば良い。
(もっと読む)
搬送車
【課題】被搬送物に収納された平板状部材の収納状態を精度良く検出することができる搬送車を提供する。
【解決手段】搬送車1は、所定の方向に沿って走行可能に設けられた走行台車3と、走行台車3に対して上下方向の軸中心に回転可能に設けられたターンテーブル9と、ターンテーブル9に設置され、カセットWを載置すると共に、カセットWの移動を行う移載装置11と、カセットWにおけるガラス基板Gの収納状態を検出光Lにより検出すると共に、その光軸方向が走行台車3の走行方向に沿い且つターンテーブル9と伴に回転しない位置に設置されたマッピングセンサ13と、移載装置11によりカセットWを取り込み、ターンテーブル9を回転させてカセットWを回転させた後に、マッピングセンサ13がカセットWにおけるガラス基板Gの収納状態を検出するように制御するコントローラ15とを備える。
(もっと読む)
剥離装置、剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体
【課題】被処理基板と支持基板の剥離処理を適切且つ効率よく行う。
【解決手段】剥離装置12は、ダイシングテープPを介して被処理ウェハWを保持する第1の保持部50と、ダイシングテープPの外側においてダイシングフレームFの表面を保持する第2の保持部51と、支持ウェハSを保持する第3の保持部52と、第3の保持部52に保持された支持ウェハSが、その外周部から中心部に向けて第1の保持部50に保持された被処理ウェハWから連続的に剥離するように、第3の保持部52の外周部を保持して鉛直方向に移動させる移動機構90と、を有している。
(もっと読む)
基板処理装置及び基板処理方法
【課題】
基板の塗布、現像処理を行う基板処理装置において、インターフェイスブロックS3内の雰囲気温度の変動にかかわらず、基板を露光機S4にて要求されている目標温度に設定すること。
【解決手段】
基板を温調プレート53により温調した上でインターフェイスブロックS3から露光機S4に搬送する。そして温調プレート53を通過する温調流体の温度を検出し、設定温度に基づいてチラー5を制御する。更に、インターフェイスブロックS3内の雰囲気の温度あるいは当該雰囲気を搬送された基板の温度を検出し、その温度に基づいて温調流体の設定温度を調整する。あるいは例えば前記雰囲気の温度が目標温度から外れているときに基板の搬送速度を前記雰囲気の温度が目標温度であるときの速度よりも速くなるようにコントロールする。
(もっと読む)
基板処理装置のデータ取得方法及びセンサ用基板
【課題】基板の面内の各部における風向のデータを取得することができる技術を提供すること。
【解決手段】気流のベクトルのデータを取得するための第1のセンサと、第2のセンサとからなる複数のセンサ対がその表面に設けられたセンサ用基板を載置部に載置する工程と、各第1のセンサにより、前記センサ用基板の表面に沿って設定された第1の直線方向における気流のベクトルのデータを取得する工程と、各第2のセンサにより、センサ用基板の表面に沿い、且つ前記第1の直線方向とは傾いて設定された第2の直線方向における気流のベクトルのデータを取得する工程と、同じセンサ対をなす第1のセンサ及び第2のセンサにより各々取得された気流のベクトルをセンサ対毎に予め設定された基点に基づいて合成し、各基点からの風向を演算する工程とを実施し、基板の面内の風向の分布を求める。
(もっと読む)
基板位置合わせ方法、基板位置合わせ装置、コンピュータプログラム、及びコンピュータ可読記憶媒体
【課題】周縁部に少なくとも2つの直線部が形成される略円形の基板を精度良く位置合わせすることが可能な基板位置合わせ方法を提供する。
【解決手段】周縁部に少なくとも2つの直線部が形成される概ね円形の基板を位置合わせする基板位置合わせ方法であって、基板を保持して回転する保持回転部により前記基板を自転させながら、前記基板の周縁部に向けて発せられた光を受光した受光部から信号を取得し、取得した信号の強度と前記基板の回転角度とを関連付ける工程と、前記信号の強度の変化に基づいて、前記2つの直線部に対応すべき2つの回転角度区間を検出する工程と、前記信号の強度に関連付けられた前記回転角度に基づいて、前記2つの回転角度区間の角度差を求める工程と、前記角度差が所定の範囲内に収まるか否かを判定する工程と、前記判定する工程において前記角度差が所定の範囲内に収まると判定された場合に、前記2つの回転角度区間が、対応する前記2つの直線部に相当すると決定する工程とを含む基板位置合わせ方法が提供される。
(もっと読む)
ストッカ
【課題】ストッカの搬送の高効率化およびストッカの省スペース化を実現することができるストッカを提供する。
【解決手段】ストッカSTは、複数の保管物CAを保管するための保管スペースSSに複数の保管物CAを入出庫口GAから入出庫するためのストッカSTであって、保管スペースSS内に配置されたストッカクレーンハンド部SHと、ストッカクレーンハンド部SHを移動させるためのストッカクレーンSCとを備えている。ストッカクレーンハンド部SHは、ストッカクレーンSCに支持されたアーム部ARと、アーム部ARに支持された2つのハンド部HAと、2つのハンド部HAのいずれかに配置されたバッファ部BUとを含んでいる。
(もっと読む)
41 - 60 / 1,258
[ Back to top ]