
Fターム[5F031GA47]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 動作 (3,504) | アームが回転 (1,258)
Fターム[5F031GA47]に分類される特許
101 - 120 / 1,258
回転駆動装置、搬送装置及び回転伝達機構
【課題】複数の回転軸が同軸上に配置される場合であっても回転伝達特性を同一とすることが可能な回転伝達装置を提供すること
【解決手段】本発明の回転伝達装置2は、第1の回転伝達機構と、第2の回転伝達機構とを具備する。
第1の回転伝達機構は、第1のハウジング32と、第1の駆動源31によって回転駆動される第1の駆動軸33と、第1の従動軸36と、第1の駆動軸33の回転を第1の従動軸36に伝達する第1の伝達部34、35とを有する。
第2の回転伝達機構は、第2のハウジング42と、第2の駆動源41によって回転駆動される第2の駆動軸43と、第1の従動軸36と同軸である第2の従動軸46と、第1の伝達部34、35と同一の構造を有し第2の駆動軸43の回転を第2の従動軸46に伝達する第2の伝達部44、45とを有する。
(もっと読む)
基板搬送装置およびそれを備えた基板処理装置、ならびに基板搬送方法

【課題】基板の高速搬送に適した基板搬送装置を提供する。
【解決手段】基板処理装置は、基板を保持するハンド23A,23Bと、ハンド23A,23Bを駆動するハンド駆動機構20,26,27と、ハンド23A,23Bの動作を補助するように気体を噴射する気体ノズルを有する動作補助ユニット10A,10Bとを含む。動作補助ユニット10A,10Bは、ハンド23A,23Bに備えられており、気体噴射により生じる反力によって、ハンド23A,23Bの動作を補助する。
(もっと読む)
異径基板用アタッチメントおよび基板処理装置ならびに基板若しくは半導体デバイスの製造方法
【課題】大径基板に対応した搬送系を構成する基板収容器(フープ)に、サイズダウンした基板を格納できるようにする。
【解決手段】8インチウェーハを支持し得る第1支持溝16eに支持される上部板401および下部板402と、上部板401および下部板402に設けられ、2インチウェーハであるウェーハ14(必要に応じて、ウェーハホルダ100およびホルダ部材405を介して)を支持し得る第2支持溝404を有する各保持柱403a〜403cとを備える。8インチウェーハに対応したポッド16に、2インチウェーハであるウェーハ14を格納でき、搬送系であるポッド16を共通化して半導体製造装置のコストを削減できる。各ガス供給ノズルから各ウェーハ14までを遠ざけて、各ウェーハ14に到達する前に反応ガスを充分に混合させることができ、各ウェーハ14への成膜精度を向上させることができる。
(もっと読む)
基板処理装置の制御方法
【課題】処理時間を短縮しスループットを向上するする。
【解決手段】複数の処理室C,Eが個別に仕切りバルブ3を介して連結された搬送室Tを介して処理室Cから処理室Eへ基板Sを移動させる搬送手段12を有する基板処理装置CTにおいて、搬送手段のロボットアーム12aを同一平面内の旋回動作及び伸縮動作させ、旋回方向に沿って配置された複数の処理室間で前記基板を搬送する際に、搬送手段の一連の動作および前記仕切りバルブの開閉動作を1つのコマンドで実行するとともに、複数の処理室における仕切りバルブが同時に開いた状態を有してなる。
(もっと読む)
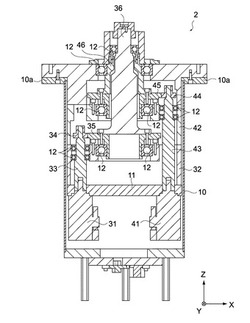
回転駆動装置
【課題】チャンバ内に配置された動力源から有効に放熱をすることが可能な回転駆動装置を提供すること
【解決手段】本発明の回転駆動装置は、隔壁と、駆動ユニットと、支持体とを具備する。隔壁は、搬送機構が収容されるチャンバに固定され、チャンバに導通する真空室を画成する。駆動ユニットは、真空室に収容され、搬送機構を駆動する。支持体は、上記真空室の外部に臨む放熱面を有し、上記隔壁に固定され上記駆動ユニットを支持する。
この構成により、真空室に収容された駆動ユニットにおいて発生する熱は、支持体に伝導し、放熱面から大気中に放熱される。このため、駆動ユニットにおいて発生する熱を有効に放熱させることが可能となる。
(もっと読む)
エンドエフェクタ及び基板搬送装置
【課題】基板の安定な保持及び確実な搬送が可能なエンドエフェクタ及び基板搬送装置を提供すること
【解決手段】本発明のエンドエフェクタ4は、エンドフェクタ本体5と、電気粘性素子6とを具備する。エンドエフェクタ本体5は、円形基板が載置される載置面を有する。電気粘性素子6は、互いに同一の半径を有する円弧形状に形成された複数の電気粘性素子6であって、載置面上に規定される単一の円上に配置される。
電気粘性素子6は、反りが生じた基板であっても、全体が円形基板に当接する。これにより電気粘性素子6に電圧を印加すると、電気粘性素子6が円形基板に密着し、円形基板を安定して保持することが可能となる。
(もっと読む)
ウエーハ及びウエーハの搬送方法
【課題】 搬送時に円形凹部の底面を異物で汚染することのないウエーハ及びウエーハの搬送方法を提供することである。
【解決手段】 円形凹部と該円形凹部を囲繞する環状凸部とを裏面に備えるウエーハであって、該円形凹部の直径が該環状凸部の上面から該円形凹部の底面に向かって大きくなる様に該環状凸部の内周壁が傾斜していることを特徴とする。搬送方法は、複数の支持指を円形凹部内に挿入し、支持指で環状凸部の内周壁上方を支持した状態でウエーハを搬送する。
(もっと読む)
真空フィードスルー
【課題】所定の材料を真空チャンバー内部の任意の箇所に正確に搬送する真空フィードスルーを提供する。
【解決手段】真空フィードスルー10Aは、パイプ11とその内部空間に位置するシャフト12とパイプ11の外周面を長さ方向へスライド可能なマグネットスライダー13とシャフト12の後端部に取り付けたマグネットホルダーとを有し、パイプ11の内部空間前端部に取り付けたシャフト12を径方向中央に保持する固定ホルダーと、シャフト12の後端部に取り付けたシャフトを径方向中央に保持する移動ホルダーとを含み、固定ホルダーは、シャフト12の外周面をスライド可能に支持するスライドベアリングを備えた支持ハウジングを有し、移動ホルダーは、弾性変形可能なアームと、長さ方向へ回転可能なローラと、アームをパイプの内周面に向かって強制的に弾性変形させてローラをパイプの内周面に押し当てるテーパープラグとを有する。
(もっと読む)
ウエーハ及びウエーハの搬送方法
【課題】 搬送時に円形凹部の底面を異物で汚染することのないウエーハ及びウエーハの搬送方法を提供することである。
【解決手段】 円形凹部と該円形凹部を囲繞する所定の幅を有する環状凸部とが裏面に形成されたウエーハであって、該環状凸部の内周壁に局所的に複数のへこみ部を有することを特徴とする。搬送方法は、複数の支持指を環状凸部の内周壁に形成された凹み部に挿入し、支持指で環状凸部の内周壁を支持した状態でウエーハを搬送する。
(もっと読む)
基板搬送方法、その基板搬送方法を実行させるためのプログラムを記録した記録媒体及び基板搬送装置
【課題】2枚の基板がスペーサ部材を介して積層されてなる積層体を基板保持部との間で搬送するときに、搬送時間を短くすることができる基板搬送方法を提供する。
【解決手段】積層体を保持していないときにスペーサ部材を保持する基板保持部に対して、積層体を搬送する基板搬送方法であって、第1のフォーク53の上方に設けられた第2のフォーク54の一方の面54a側に設けられた第1の掴み機構61により、第1の基板を下掴みして受け取り、第2のフォーク54を上下反転させて第1のフォーク53に載置する第1の工程と、第2のフォーク54の一方の面54aと同一面側に設けられた第2の掴み機構62により、基板保持部に保持されているスペーサ部材を上掴みして受け取り、第1の基板上に載置する第2の工程と、第1の掴み機構61により第2の基板を上掴みして受け取り、スペーサ部材上に載置する第3の工程とを有する。
(もっと読む)
基板処理装置
【課題】複数の処理槽のそれぞれに複数の基板を良好に一括搬送することができる基板処理装置を提供する。
【解決手段】基板処理装置1は、搬送ロボット10と、処理部40とを有している。処理部40は、複数の処理槽41、42を有しており、処理槽41には処理液として洗浄液が、処理槽42には処理液として薬液が貯留される。搬送ロボット10は、単一の搬送ユニットとして構成されている。搬送ロボット10は、本体部12と、本体部12から離隔して配置された各処理槽41、42に向かって伸びるアーム部13とを有している。ここで、各処理槽41、42は、搬送ロボット10の可動範囲内となるように、複数の基板の搬送空間8に配置されている。これにより、搬送ロボット10は、複数の基板を、各処理槽41、42の配置によらず、任意の順番で、各処理槽41、42に対応して貯留された処理液に、浸漬することができる。
(もっと読む)
接合方法、プログラム、コンピュータ記憶媒体、接合装置及び接合システム
【課題】基板同士の接合の良否を検査し、基板接合後の処理を円滑に行う。
【解決手段】上ウェハと下ウェハを接合する(工程S1〜S13)。その後、上部チャックにおいて上ウェハに対する真空引きを行い、吸引管の内部の圧力に基づいて、上ウェハと下ウェハの接着の良否を判定する(工程S14)。その後、上部チャックにおいて上ウェハに対する真空引きを行い、吸引管の内部の圧力に基づいて、上ウェハと下ウェハの接合強度の良否を判定する(工程S15)。その後、重合ウェハの外径を測定し、当該測定結果に基づいて、上ウェハと下ウェハの接合位置の良否を判定する(工程S16)。工程S16では、測定結果が所定の閾値未満である場合、接合位置が正常であると判定し、測定結果が所定の閾値以上である場合、接合位置が異常であると判定する。
(もっと読む)
基板処理システム、管理装置、及びデータ解析方法
【課題】モニタデータの解析を要する異常(例えば、成膜異常)について監視するために、最適なコンテンツを作成する仕組みを提供する。
【解決手段】基板処理システムは、基板を処理する基板処理装置と、前記基板処理装置から送信される測定データを蓄積する蓄積手段と、前記基板処理装置の稼動状態に関する前記測定データの項目、前記測定データに適用する統計量の種類、及び前記統計量の判定に用いる条件をそれぞれ個別に記憶する記憶手段と、前記記憶手段に記憶された前記測定データの項目、前記統計量、及び前記条件からなる組み合わせについて、前記蓄積手段に蓄積された前記測定データが異常と判断される組み合わせを抽出する抽出手段と、を備えた管理装置と、を含む。
(もっと読む)
基板搬送装置、基板搬送方法及びその基板搬送方法を実行させるためのプログラムを記録した記録媒体
【課題】同一のフォークにより基板及びスペーサ部材のいずれをも支持可能であるとともに、収納容器に収容されている基板及びスペーサ部材の間隔を小さくすることができる基板搬送装置を提供する。
【解決手段】裏面同士が対向する2枚の基板がスペーサ部材を介して積層されてなる積層体を上下方向に複数保持する基板保持部に対して、積層体を搬送する基板搬送装置において、基板保持部との間で積層体を受け渡す第1のフォーク53と、第1のフォーク53の上方に、基板及びスペーサ部材を収容する収容部に進退可能かつ上下反転可能に設けられ、収容部と第1のフォーク53との間で基板又はスペーサ部材を受け渡す第2のフォーク54と、第2のフォーク54の一方の面54a側に設けられ、基板を上掴みする第1の掴み機構61と、第2のフォーク54の一方の面54aと同一面側に設けられ、スペーサ部材を上掴みする第2の掴み機構62とを有する。
(もっと読む)
接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体
【課題】基板を押圧する際の荷重を適切に制御し、基板同士の接合を適切に行う。
【解決手段】接合装置は、下面に上ウェハWUを吸着保持する上部チャック230と、上部チャック230の下方に設けられ、上面に下ウェハWLを載置して吸着保持する下部チャック231と、を有している。上部チャック230には、上ウェハWUの中心部を押圧する押動部材250が設けられている。押動部材250は、上ウェハWUの中心部と当接して当該上ウェハWUの中心部にかかる荷重を制御するアクチュエータ部251と、アクチュエータ部251を鉛直方向に移動させるシリンダ部252とを有している。アクチュエータ部251には、当該アクチュエータ部251に対して所定の圧力の空気を供給する電空レギュレータが設けられている。
(もっと読む)
真空処理装置および真空処理方法
【課題】トレイに対するマスクの位置ずれをより正確に検知する。
【解決手段】真空処理装置は、基板を真空処理する真空処理室と、前記基板と、前記基板を載置可能なトレイと、前記トレイに載置されるマスクと、からなる組体と、前記組体を前記真空処理室内に搬送する搬送アームと、前記真空処理室内に設置され、前記組体を支持する支持台と、前記真空処理室内に設置され、前記搬送アームと前記支持台の間で前記組体を移動させるリフタと、を備え、前記組体の状態を検出可能な複数の検出手段を有し、前記検出手段からの複数の検出結果によって前記マスクと前記トレイとの位置がずれた状態と判断する判断手段が設けられている。
(もっと読む)
搬送ロボット
【課題】直動搬送機構を用いることなく省スペース化を図ること。
【解決手段】搬送ロボット10は、スイングアーム部11と、アームユニット12とを備える。スイングアーム部11は、基端部に設けられたスイング軸P1を中心として水平方向に揺動する。アームユニット12は、スイングアーム部11の先端部に設けられた鉛直な旋回軸P2を中心として回転する本体部121と、本体部121に連結され水平方向に伸縮する右伸縮アーム部122Rおよび左伸縮アーム部122Lと、右伸縮アーム部122Rおよび左伸縮アーム部122Lの先端にそれぞれ設けられたワーク保持部123R,123Lとを備える。
(もっと読む)
基板搬送装置の位置調整方法、及び基板処理装置
【課題】調整治具を使用することなく搬送位置調整を行うことが可能な基板搬送装置の位置調整方法を提供する。
【解決手段】基板を搬送する基板搬送部により基板を保持し、基板の位置を検出する第1検出ステップと、基板搬送部により保持される基板を、基板を保持して回転する基板回転部へ搬送するステップと、基板回転部に保持される基板を、基板回転部により所定の角度だけ回転するステップと、基板回転部により回転された基板を、基板搬送部から受け取るステップと、基板搬送部が受け取った当該基板の位置を検出する第2検出ステップと、第1検出ステップで求めた基板の位置と、第2検出ステップで求めた基板の位置とに基づいて、基板回転部の回転中心位置を把握するステップと、把握された回転中心位置に基づいて、基板搬送部の位置を調整するステップとを含む基板搬送装置の位置調整方法が提供される。
(もっと読む)
ウエハボート組立体、このようなウエハボート組立体を含む搬入装置及び縦型炉への搬入方法
【課題】縦型炉内にカバーボート内の平面状の薄型半導体基板を搬入する改良型搬入装置を提供する。
【解決手段】バッチ処理用に構成される縦型炉において半導体基板を搬入する搬入装置に用いられるウエハボート組立体であって、半導体基板を保持するウエハボートと、これらの基板を実質的に取り巻くように構成されるカバーとを含むウエハボート組立体において:
ベース部と、ベース部に取り付けられる第1のカバー部分であって、少なくとも部分的にベース部上側周縁部に沿って延在する第1のカバー部分とを有する第1のウエハボート部分と;
第1のウエハボート部分に取外し可能に配設されると共に第1のカバー部分と協働するように構成される第2のカバー部分であって、少なくとも1つの加工処理対象の半導体基板を受ける受入れスロットを含む第2のカバー部分を有する第2のウエハボート部分とを具備するウエハボート組立体。
(もっと読む)
露光ユニット及び基板のプリアライメント方法
【課題】専用のプリアライメント装置を設けることなく、短時間で且つ精度よく基板を露光装置のワークチャックに搭載して、タクトタイムの短縮を図ることができる露光ユニット及び基板のプリアライメント方法を提供する。
【解決手段】ロボット17は、基板載置台25で基板Wを保持して処理ユニット14から露光装置15に搬送する。基板載置台25で保持されている基板Wは、センサ30a,30b,30cが、互いに直交する2辺26、27に設けられた切欠き28a、28b、29を検出し、この検出結果と所定の基準位置とから算出されるズレ量に基づいて、制御部18が基板載置台25をX,Y,Z方向に移動、且つθ方向に回転させて、基板Wをプリアライメントする。
(もっと読む)
101 - 120 / 1,258
[ Back to top ]