
Fターム[5F031GA47]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 動作 (3,504) | アームが回転 (1,258)
Fターム[5F031GA47]に分類される特許
121 - 140 / 1,258
基板処理装置
【課題】 基板処理装置のスループットを向上させつつ、基板に処理液の濡れ残りが発生するのを防止できる基板処理装置を提供する。
【解決手段】裏面処理部において、基板Wに処理液を供給して洗浄処理を行った後に乾燥処理を行う。その後、メイン搬送ロボットにより裏面処理部から第2反転ユニットの上方に配置された第1反転ユニット23へ基板Wを搬送する。この第1反転ユニット23では、基板Wを裏面から表面へ反転させている際にフィルターファンユニット52からのダウンフローが開始されるとともに、反転機構の上下に配置された加熱装置50が基板Wへの加熱処理を行う。基板Wの反転動作及び乾燥処理が終了すると、メイン搬送ロボットは第1反転ユニット23から基板Wを搬出する。
(もっと読む)
被処理体の搬送方法及び被処理体処理装置

【課題】各種処理における処理時間を短縮しても生産性が頭打ちになる事情を抑制できる被処理体の搬送方法を提供すること。
【解決手段】第1トランスファアームを伸縮させ、処理室32aに収容された処理済の被処理体(a)を第1ピック35aに受け取らせる工程と、第1、第2トランスファアームを旋回させ、処理前の被処理体(1)を保持した第2ピック35bを処理室32a前に設定された受け渡し位置に移動させるとともに、処理済の被処理体(a)を保持した第1ピック35aをロードロック室41bの前に設定された受け渡し位置に隣接する位置に移動させる工程と、第2トランスファアームを伸縮させ、第2ピック35bに保持された処理前の被処理体(1)を処理室32aに収容する工程と、第2トランスファアームを旋回させ、被処理体を保持していない第2ピック35bをロードロック室41bの前に設定された受け渡し位置に移動させる工程と、を備える。
(もっと読む)
基板処理装置及び半導体装置の製造方法
【課題】基板処理(JOB)開始時に基板処理で使用される処理室に対して、予め必要と思われる前処理を一括で実施することにより、大気搬送ロボットの待機状態を解消し、基板処理(JOB)の処理スループットの向上を図る。
【解決手段】基板を処理する処理室と、前記処理室に連接され、前記基板を搬送する搬送手段を備える搬送室と、基板を格納する基板収容器が載置される基板載置台と、前記基板収容器から最初の基板を搬出するときに、前記基板を処理する際に使用される全ての処理室を前処理するように制御する制御手段で少なくとも構成されている。
(もっと読む)
ワーク搬送システム、および搬送室用フレーム構造体
【課題】ワーク搬送時の振動を抑制するのに適したワーク搬送システムを提供する。
【解決手段】ワーク搬送システムAは、ワーク搬送装置4が配置される搬送室1と、搬送室1に隣接して設けられ、ワーク収納用の容器21が載置されるロードポート2と、を備える。搬送室1は、鋼材により構成されるフレーム構造体1Aを含む。フレーム構造体1Aは、床面6に設置され、ワーク搬送装置4が載置される第1フレーム部材11と、この第1フレーム部材11に対して起立状に設けられ、ロードポート2を支持する第2フレーム部材12と、を備える。ワーク搬送装置4が載置されるフレーム構造体1Aは、鋼材によって構成されているため、比較的に比重が大きく、かつ剛性が高い。これにより、ワーク搬送装置4によるワーク搬送の際に当該ワーク搬送装置4において振動が生じても、フレーム構造体1Aにおける振動を抑制することができる。
(もっと読む)
ワーク搬送装置
【課題】低床化を維持しつつ高速でのワーク搬送を行うのに適したワーク搬送装置を提供する。
【解決手段】ワーク搬送装置Aは、固定ベース1と、固定ベース1に支持されて昇降する昇降ベース2と、昇降ベース2に対して垂直軸O1周りに回動可能に支持された第1アーム3と、第1アーム3の先端に対して垂直軸O2周りに回動可能に支持された第2アーム4と、第2アーム4の先端に対して垂直軸O3周りに回動可能に支持されたハンド5Aと、ハンド駆動機構6Aと、を備え、ハンド駆動機構6Aは、第1アーム3の内部に配置されたモータ61aと、第1ないし第2アーム3,4の内部に配置され、モータ61aの出力をハンド5Aに伝達する伝動機構62aと、を含む。モータ61aと伝動機構62aの一部とを第1アーム3の内部空間に配置することで、第2アーム4先端の伝動機構62aの高さおよび固定ベース1ないし昇降ベース2の高さが低くなる。
(もっと読む)
成膜システム及び成膜方法
【課題】基板毎に成膜の目標膜厚を設定でき、ひいては電極線幅に対応した膜厚を形成することができる成膜システム及び成膜方法を提供する。
【解決手段】基板18上に形成された複数箇所のレジスト19を測定する測定室102と、基板18を1枚ずつ成膜して基板18上に電極21を形成する枚葉式成膜室104と、を有する成膜システム100であって、基板18上にて隣接するレジスト19のレジスト間距離またはレジスト線幅を測定する測定手段116を測定室102に有し、測定手段116によって測定したレジスト間距離またはレジスト線幅に基づいて、基板18から作製される電気素子が所定の周波数を得るための最適な電極膜厚を算出する制御手段114を有し、枚葉式成膜室104は、基板18の電極膜厚が制御手段114で算出された最適な電極膜厚となるように、基板18に電極を形成する成膜手段10を有することを特徴とする。
(もっと読む)
基板処理装置、基板処理方法、ならびに、プログラム
【課題】基板搬送を効率的に行うとともに、精度の高い基板の搬送処理に対応することができる基板処理装置、基板処理方法ならびに、プログラムを提供する。
【解決手段】複数のアーム103a、103bにより、同一水平線上で且つ水平位置と高さとが互いに異なる位置で把持した基板を処理室200に搬送する。処理室200に搬送された基板は、複数のアーム103a、103bの基板把持位置に対応する高さを有し、水平方向に並列に配置された複数の基板載置台206a、206bに載置される。また、排気処理は、第1室207の排気を第2室208の排気が開始する前に開始する。
(もっと読む)
自動倉庫
【課題】効率よく荷物の入出庫を行うことのできる自動倉庫を提供すること。
【解決手段】複数の棚75を有する第一ラック70aと、移載装置30と、コントローラ100とを備える自動倉庫1であって、コントローラ100は、複数の指令情報を順次受信する受信部102と、複数の指令情報を蓄積する蓄積部104と、第一指令情報に示される所定の荷物を載置する棚である入庫棚を複数の棚の中から決定する決定部106と、第一指令情報の次に実行すべき第二指令情報に示される指令が実行可能であるか否かを判定する判定部108とを有し、決定部106は、(a)第二指令情報に示される指令が実行可能であると判定された場合、第二指令情報に示される指令の内容に基づいて入庫棚を決定し、(b)第二指令情報に示される指令が実行可能でないと判定された場合、第二指令情報の次に実行すべき第三指令情報に示される指令の内容に基づいて入庫棚を決定する。
(もっと読む)
ウエハ搬送ロボット
【課題】半導体ウエハを対向するチャンバ間でスムーズに移動することのできる搬送ロボットを提供する。
【解決手段】ウエハ搬送ロボット100は、2本のリンク12、13で構成されているアーム10を備える。アーム10の先端にはウエハホルダ6が備えられている。アーム10の基部に相当する駆動リンク13は筐体2に回転可能に連結されている。アーム10は、駆動リンク13の回転に伴うアーム先端の運動が直線又は曲線の軌道に制限される構造を有しているとともに、その軌道は、始点Wsと終点Weが駆動リンク13の回転中心から等距離の位置にあり、始点におけるアーム先端の向きと終点におけるアーム先端の向きが、始点と終点の間の中点と前記回転中心を通る直線に対して鏡像の関係を満たしている。
(もっと読む)
剥離装置、剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体
【課題】加熱処理を伴う被処理基板と支持基板との剥離処理の際に、基板の接合面で急激に酸化が進行することを効率的に抑制する。
【解決手段】剥離装置30は、被処理ウェハWを保持する第1の保持部110と、
支持ウェハSを保持する第2の保持部111と、第1の保持部110又は第2の保持部111を相対的に水平方向に移動させる移動機構150と、移動機構150により水平方向に移動させることで露出した被処理ウェハWの接合面WJに不活性ガスを供給する不活性ガス供給機構170と、を有している。不活性ガス供給機構170は、複数の孔が形成された平板形状の多孔質部171と、多孔質部171に接続され、当該多孔質部171に不活性ガスを供給するガス供給管172を有し、多孔質部171は、被処理ウェハWの接合面WJから鉛直方向に所定の距離離間して設けられている。
(もっと読む)
吸着装置及びロボットシステム
【課題】吸着パッドの摩耗を検出することが可能な吸着装置及びロボットシステムを提供する。
【解決手段】ロボットシステム10は、搬送物Gを吸着する吸着パッド76及び吸着パッド76の吸着圧力を検出する圧力センサ66a〜66dが設けられたエンドエフェクタ48a、48bを有するロボット20と、吸着パッド76が搬送物Gを吸着してから吸着パッド76の吸着圧力が安定するまでの間に圧力センサ66a〜66dが検出した吸着圧力の過渡データDに基づいて、吸着パッド76の摩耗を判断する判断部86を有する制御装置30とを備える。
(もっと読む)
真空処理装置の運転方法
【課題】作業効率が良く精度の高いティーチングを行って処理の効率を向上できる真空処理装置の調整方法を提供する。
【解決手段】その上面に所定の波長の光の反射の特性を局所的に異ならせた特定の箇所を有した調整用の試料を前記試料台の上面の特定の位置と前記特定の箇所とを合わせて載置した後、前記真空容器の内部を封止した状態で前記ロボットを移動させて前記ロボットのアーム上の所定の位置に配置され前記反射した所定の波長の光の通過部を前記調整用の試料の前記特定の箇所の上方に移動させ、その移動の際に前記調整用の試料から向かって前記通過部を通過した光を前記板部材の外側で検知し、検出した前記光の量に応じて前記試料の特定の箇所と前記ロボットの所定の位置との位置合わせを行う。
(もっと読む)
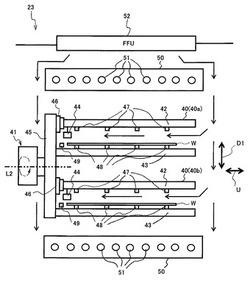
基板反転装置、基板反転方法、剥離システム、プログラム及びコンピュータ記憶媒体
【課題】研磨処理により薄型化された基板を、反りや割れを生じることなく裏表反転させる。
【解決手段】基板反転装置42は、被処理ウェハWを保持する第1の保持部270と、第1の保持部270に対向して設けられた、被処理ウェハWを保持する第2の保持部271と、第1の保持部270と第2の保持部271を相対的に移動させて第1の保持部270と第2の保持部271を接近、離隔させる移動機構272と、被処理ウェハWを保持して搬送する搬送機構を有している。第1の保持部270、第2の保持部271及び搬送機構における被処理ウェハWの保持は、ベルヌーイチャックにより行われる。
(もっと読む)
剥離システム、剥離方法、プログラム及びコンピュータ記憶媒体
【課題】剥離処理により被処理基板と支持基板の剥離処理を行う際に発生するパーティクルが、当該剥離装置の外部に拡散することを抑制する。
【解決手段】剥離システム1は、被処理ウェハW、支持ウェハS又は重合ウェハTを搬入出する搬入出ステーション2と、被処理ウェハW、支持ウェハS及び重合ウェハTに所定の処理を行う剥離処理ステーション3と、搬入出ステーション2と剥離処理ステーション3との間に設けられた搬送ステーション7とを有している。剥離処理ステーション3は、重合ウェハTを剥離する剥離装置30と、第1の洗浄装置31と、第2の洗浄装置33とを有している。搬送ステーション7内の圧力は、剥離装置30内の圧力、第1の洗浄装置31内の圧力及び第2の洗浄装置33内の圧力に対して陽圧である。
(もっと読む)
樹脂塗布装置
【課題】ワーク厚みのバラつきや樹脂の量の増減にかかわらず、樹脂を適切に押し広げること。
【解決手段】本実施の形態に係る樹脂塗布装置1は、ステージ602の上面に供給された液状樹脂Lを押圧部604における押圧面634に保持したワークWで上から押圧し液状樹脂LをワークW下面に広げる樹脂塗布装置1であって、押圧部604には、移動部606によるワークWのステージ602への接近によってワークW下面に液状樹脂Lが押し広げられる際に押圧面634が受ける圧力を検出する圧力センサ633が備えられ、制御部は圧力センサ633が検出した圧力に基づいて移動部606の動作を制御する構成とした。
(もっと読む)
樹脂塗布装置
【課題】ステージ上面に気密に貼り付けられたシートを、ステージ上面から容易に剥がすこと。
【解決手段】本実施の形態に係るステージ602は、シートSの外周領域を保持する第一の保持面652と、シートSの内側領域に対応して設けられた凹部622の内底面において、シートSの内側領域を保持する第二の保持面653と、凹部622の内周面にて、シートSと第二の保持面653と共に閉空間657を形成する側面654と、閉空間657からエアを吸引する吸引口813とが形成され、吸引口813からのエアの吸引により、第一の保持面652に保持されたシートSを引き伸ばしつつ、第二の保持面653に保持させる構成とした。
(もっと読む)
基板処理装置
【課題】枚葉式処理装置とバッチ式処理装置との間で基板の連続的かつ効率的な搬送を可能にして、枚葉/バッチ混載処理のスループットを向上させる。
【解決手段】この基板処理装置は、横長のプロセスステーション10をシステム中心部に配置し、その長手方向(X方向)の両端部にローダ12およびアンローダ14を連結している。プロセスステーション10は、ローダ12からアンローダ14に向かってプロセスフローの順に配置された枚葉集中ブロック10A,枚葉/バッチ混載ブロック10Bおよび枚葉集中ブロック10Cから構成されている。中間の枚葉/バッチ混載ブロック10Bには、1台または複数台の枚葉式作用極成膜ユニット36と、1台または複数台の枚葉式グリッド配線成膜ユニット38と、バッチ式熱処理装置40と、バッチ式焼成装置42とが配備されている。
(もっと読む)
真空処理装置
【課題】設置面積を増大させることなく、処理能力を向上させることが可能な真空処理装置を提供する。
【解決手段】処理すべき基板Sに対し、真空雰囲気中で一貫して複数の処理を施す真空処理装置Mにおいて、相互に隔絶可能に連結された複数の処理室A乃至Eと、各処理室間に対して基板を搬入または搬出する搬送ロボット1と、少なくとも搬送ロボット1の作動を制御し得る制御ユニット7と、を備える。処理室A乃至Eのうち同一の処理を施す少なくとも2つの処理室C1、C2を、複数枚の基板を収容してこれら複数枚の基板に対して同時にストック処理を施すストック処理室とし、何れか一のストック処理室でストック処理を施す間、他のストック処理室に対しては基板の搬入又は搬出のみを行うように構成した。
(もっと読む)
ワーク保持装置
【課題】位置センサを備えることなく押圧手段を所定位置にセットアップでき、装置全体にかかるコストを低減すること。
【解決手段】本実施の形態に係るワーク保持装置は、気体供給部637によって供給される気体を吸引口から噴出しながら保持部(保持板624)とステージ602との間の距離を変化させ、このときの圧力変化のマップを圧力センサ633によって検出し、圧力センサ633の検出する圧力の値と前記マップに基づいて保持部とステージ602との間の距離を算出する構成とした。
(もっと読む)
ウエハ載置機構、ウエハ載置ステージ、及びレジスト形成装置
【課題】現状の設備から改造無しで、ウエハによるウエハ載置台の汚染や損傷を回避しつつ、ウエハとウエハ載置台との間での良好な熱伝導を確保することができるウエハ載置機構及びウエハ載置ステージ、並びに、このようなウエハ載置ステージを用いたレジスト形成装置を得る。
【解決手段】ウエハの処理を行う際に該ウエハを支持するウエハ載置ステージ100aにおいて、ウエハを支持するための載置ステージ本体111と、該載置ステージ本体上に、該載置ステージ本体の表面に密着するよう、該載置ステージ本体に着脱自在に設けられ、該ウエハを載置するためのスペーサ部材112とを備えた。
(もっと読む)
121 - 140 / 1,258
[ Back to top ]