
Fターム[5F031GA54]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | 回転テーブル (96)
Fターム[5F031GA54]に分類される特許
1 - 20 / 96
LED素子のソーティング装置
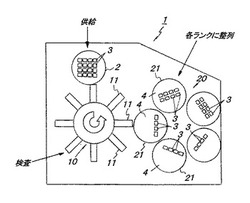
【課題】検査工程と整列工程を1台の設備で行うことによって工数削減と設備費のコストダウン及び設置スペースの縮小を図ることができるLED素子のソーティング装置を提供すること。
【解決手段】半導体ウエハ2を裁断して得られる複数のLED素子3の各特性をそれぞれ検査するとともに、各LED素子3の位置をそれぞれ検出し、各LED素子3をその特性データと位置データに基づいて各ランク毎に整列させてシート4上に貼付するLED素子3のソーティング装置1を、放射状に延びる複数のアーム11を備えた回転可能且つ上下動可能なインデックスユニット10を設け、該インデックスユニット10の前記各アーム11を回転及び上下動させてその先端に前記LED素子3を吸着しつつ、該LED素子3の位置検出と特性の検査、各ランク毎の整列及びシートへの貼付を順次行うよう構成する。
(もっと読む)
ロボットのアーム構造およびロボット

【課題】ロボットの最小旋回径を小さくすること。
【解決手段】実施形態に係るロボットは、第1アーム部、第2アーム部、中間リンク部、第1リンク部および第2リンク部を備える。第1リンク部は、第1アーム部と中間リンク部と固定ベース部との間で第1平行リンク機構を形成する。第2リンク部は、第2アーム部と中間リンク部と可動ベース部との間で第2平行リンク機構を形成する。そして、第2リンク部と中間リンク部との連結軸から第1アーム部と第2アーム部との連結軸までの距離は、第2リンク部と中間リンク部との連結軸から第1アーム部と第2アーム部との連結軸までの距離よりも短い。
(もっと読む)
基板処理装置
【課題】輸送時に基板搬送容器格納棚の分解を必要とせず、又再組立てを必要とせず、輸送コストを低減できると共に作業性の向上を図る基板処理装置を提供する。
【解決手段】複数枚の基板21が収納される基板搬送容器9と、該基板搬送容器を搬送する基板搬送容器搬送装置15と、該基板搬送容器搬送装置15により搬送された複数の基板搬送容器9が格納される基板搬送容器格納棚11とを具備し、該基板搬送容器格納棚11を高さ方向に伸縮可能とした。
(もっと読む)
研削装置
【課題】保持テーブルの回転によるワークの位置ずれを抑制でき、ワークの位置を精度よく検出できる研削装置を提供すること。
【解決手段】研削装置の検出手段における保持テーブル8aは、上面中央に吸引口8lを有する基台部8gと、基台部8g上に吸引口8lを囲むように配設された環状部材8hと、基台部8g上の環状部材8hの内側に配設された中央部材8iと、を有し、環状部材8hは非通気性と弾性とを有しワークW表面に貼着された保護テープの凹凸を吸収できる厚みであり、中央部材8iは通気性と弾性とを有する構成とした。
(もっと読む)
基板処理装置
【課題】ダミーウェハを適切に使用することで生産処理とダミー処理とを効率よく実行する基板処理装置を提供する。
【解決手段】ダミー基板と製品基板とを含む基板に処理を施す複数の処理室と、前記各処理室へ基板を基板保持部に保持して搬送する第一搬送手段を備えた第一搬送室と、大気圧状態で基板を搬送する第二搬送手段を備えた第二搬送室と、前記第一搬送室と前記第二搬送室を連結する減圧可能な予備室と、前記搬送室と前記予備室に対して設けられる排気手段と、複数の基板が収納された基板収納手段と前記処理室との間の前記第一搬送手段および前記第二搬送手段の搬送を制御する制御手段とを設けた基板処理装置である。前記制御手段は、複数のダミー基板の使用状態を個別に管理し、ダミー基板の使用状態が予め定められた使用状態に達したか否かを判定する。
(もっと読む)
リンク式ロボットアーム装置
【課題】アームの制御性低下を効果的に抑制するとともに、吸着ON・OFF状態の切替応答性が向上するリンク式ロボットアーム装置を提供する。
【解決手段】アームの先端側に配置され且つ吸着用エア供給口C3を有するエンドエフェクタCによって搬送対象物を吸着保持可能なリンク式ロボットアーム装置Xとして、アーム1の内部に設けたエア管4を介して吸着用エア供給口C3に接続され、吸着用エア供給口C3に吸着用エアを供給可能な状態と、吸着用エア供給口C3への吸着用エア供給を停止する状態との間で切替可能な吸着切替ユニット3を備え、この吸着切替ユニット3を、アーム1のうちアーム長1Lの半分1Cよりもシータ軸J3に近い位置に設けた。
(もっと読む)
ワーク搬送装置及びワーク搬送方法
【課題】薄板状のワークの保持を非接触状態から接触状態又は接触状態から非接触状態に切替える際にワークの傾斜を防止できるワーク搬送装置及びワーク搬送方法を提供する。
【解決手段】ワーク搬送装置10は、薄板状のワーク11に向けて下降接近し、ワーク11を吸引し非接触状態で保持して移動する非接触式搬送機構15と、非接触式搬送機構15から受け取ったワーク11を真空吸引により吸着保持して移動する吸着テーブル16を備えた接触式搬送機構21と、非接触式搬送機構15から接触式搬送機構21にワーク11を受け渡す際に、吸着テーブル16の真空吸引開始及び非接触式搬送機構15の吸引停止のタイミングを制御する制御手段27とを有し、制御手段27は、非接触式搬送機構15を下降させた後に真空吸引を開始させ、ワーク11の下面と吸着テーブル16の上面との距離が受渡し距離に到達した時点で非接触式搬送機構15の吸引を停止する。
(もっと読む)
基板ホルダーストッカ装置及び基板処理装置並びに該基板ホルダーストッカ装置を用いた基板ホルダー移動方法
【課題】フットプリントを低減できる基板ホルダーストッカ装置を提供する。
【解決手段】基板に真空処理を行うプロセスチャンバ内を搬送される基板ホルダーを収納する基板ホルダーストッカチャンバ18は、複数の基板ホルダーをその板厚方向に並べて保持するとともに往復移動する可動式テーブルAと、可動式テーブルAと並設され、複数の前記基板ホルダーその板厚方向を並べて保持するとともに往復移動する可動式テーブルBと、所定位置に停止した可動式テーブルA及び可動式テーブルBのいずれか一方に保持された基板ホルダーを、可動式テーブルA及び可動式テーブルBのいずれか他方に保持させるテーブル間移送機構31とを備えている。
(もっと読む)
基板処理装置
【課題】第1搬送手段及び第2搬送手段の調整処理と、調整が終了した処理室へのプロセス前準備を並行して実施可能とすることで、調整処理時間の短縮を図る基板処理装置を提供する。
【解決手段】基板に処理を施す複数の処理室5,6と、該処理室へ基板を搬送する第1搬送手段を備えた第1搬送室2と、大気圧状態で基板を搬送する第2搬送手段を備えた第2搬送室7と、第1搬送室と第2搬送室を連結する減圧可能な予備室3,4と、第1搬送手段及び第2搬送手段の駆動を制御する第1制御手段と、前記第1搬送手段及び前記第2搬送手段の調整処理を指示する第2制御手段とを具備し、組立時の調整処理の際に、第1搬送手段及び/又は第2搬送手段の調整処理と、処理室のプロセス前準備を並行して実施可能に構成した。
(もっと読む)
半導体装置の製造装置及び半導体装置の製造方法
【課題】塗布対象物に接着剤の塗布膜を所望する膜厚で形成する。
【解決手段】半導体装置の製造装置1は、塗布対象物Wの塗布面に紫外線を照射する照射部5と、照射部5により紫外線が照射された塗布面に接着剤を塗布する塗布部6とを備え、照射部により紫外線が照射された塗布面に接着剤を塗布する。また前記塗布対象物を支持するハンドを有し、前記ハンドにより前記塗布対象物を搬送する搬送部をさらに備え、前記照射部は、前記搬送部により移動する前記塗布対象物の前記塗布面に前記紫外線を照射する。前記照射部は、前記紫外線を発生させるランプと、前記ランプによって発生する前記紫外線の光量を検出する検出器と、前記検出器によって検出された前記紫外線の光量に基づいて前記塗布面に対する照射光量を設定値に維持するように調整する調整手段とを具備する。
(もっと読む)
剥離方法及び剥離装置
【課題】ウエハからサポートプレートをより容易に剥離する。
【解決手段】本発明に係る剥離方法は、非極性溶剤に対して溶解性を示す接着化合物又は高極性溶剤に対して溶解性を示す接着化合物により形成された接着剤層4を介してサポートプレート3が貼着されたウエハ2から、サポートプレート3を剥離する剥離方法であって、接着剤層4に上記非極性溶剤又は上記高極性溶剤を供給する供給工程を包含している。したがって、溶剤の供給時に、ウエハ2に貼り付けられたダイシングテープ5を保護する必要がない。
(もっと読む)
半導体装置の製造装置及び半導体装置の製造方法
【課題】半導体ウエーハなどの薄い紙状の対象物の正確な位置決めを行う。
【解決手段】半導体装置の製造装置1は、塗布対象物Wの中心をハンド3aの中心に合わせるセンタリング部4aを具備しており、センタリング部4aは、塗布対象物Wを支持する支持台31と、支持台31上の塗布対象物Wを押して移動させ、支持台31に対して位置決めされたハンド3aの中心に塗布対象物Wの中心を合わせる複数の押圧部32とを具備している。
(もっと読む)
ウエハ保持装置
【課題】ウエハ保持装置の交換作業を行うことなく、異なる直径を有する半導体ウエハを保持することが可能なウエハ保持装置を提供する。
【解決手段】このウエハ保持装置100は、異なる直径を有するウエハ120(130)を載置可能であるとともに、異なる直径を有するウエハ120(130)に共通に用いられる前方ウエハ把持部22を有する前方ウエハ載置部21と、前方ウエハ把持部22とともにウエハ120(130)を把持可能なローラ31a、31bおよび突起部31cを有し、ウエハ120(130)の直径の大きさに応じて前方ウエハ把持部22に近づく前方向および前方ウエハ把持部22から離間する後ろ方向にスライド可能なスライドアーム30とを備える。
(もっと読む)
搬送装置
【課題】安定した昇降位置精度を確保することができるとともに、時間あたりの搬送作業効率の高い基板搬送作業を実現することができる搬送装置を提供する。
【解決手段】搬送装置1においては、第1のアーム10の駆動軸310A及び旋回軸310Bと同軸上に第1のアーム10を昇降させる昇降軸52が配置されている。昇降軸52がとく同軸310A及び旋回軸310Bと同軸上に配置されているため、昇降軸52が搬送装置1の重心またはその近傍に位置する。さらに、同一平面内における第1のアーム10及び第2のアーム20の占有範囲を90度よりも小さい角度範囲に収めることで、時間あたりの搬送作業効率の高い基板搬送作業を実現することができる。
(もっと読む)
ワーク搬送方法およびワーク搬送装置
【課題】ワークの種類に関わらずワークを精度よく搬送可能なワーク搬送方法およびワーク搬送装置を提供する。
【解決手段】同心円周上に所定ピッチで複数個の貫通孔が形成さえた、保持面から僅かに突出したパッド77を先端のU形の保持アーム34に、さらに所定ピッチで複数個有し、当該パッド77から保護シートに向けて圧縮空気を吹き付けて保持アーム34の保持面と保護シートとの間に負圧を発生させて保護シートを浮遊させた状態で懸垂保持し、あるいは当該パッド77で表面の回路の露出したウエハの裏面を吸着保持してそれぞれを搬送する。
(もっと読む)
搬送機構
【課題】アーム部自体の温度上昇を抑制して搬送精度を高く維持することが可能な搬送機構を提供する。
【解決手段】処理容器56内で被処理体Wに熱処理を施す処理装置に対して被処理体を搬出入させる搬送機構において、複数のアーム94、96、98を有して屈伸及び旋回が可能になされたアーム部36A、36Bと、アーム部の先端に連結されて被処理体を保持するフォーク部38A、38Bと、アーム部の内で処理容器内に侵入する部分に設けた熱遮蔽板104とを備える。これにより、アーム部自体の温度上昇を抑制して搬送精度を高く維持する。
(もっと読む)
パターン形成装置
【課題】 基板に対するパターン形成を迅速且つ正確に行うことができるパターン形成装置を提供する。
【解決手段】 基板wに対してパターン形成を行うパターン形成装置1であって、支持板2と、支持板2を回動する駆動手段8と、支持板2の回動により検出位置Dに搬送された基板wの位置を検出する基板位置検出手段20と、支持板2の回動により加工位置Pに搬送された基板wに対してパターン形成を行う加工手段30とを備え、支持板2の各装着部4,4は、基板位置検出手段20の検出に基づいて基板wの位置を修正する位置修正手段5を備えており、駆動手段8は、支持板2を正逆両方向に180°回動して各装着部4,4が検出位置Dと加工位置Pとの間で移動するように制御される。
(もっと読む)
基板搬送装置及び基板搬送方法並びに記憶媒体
【課題】基板載置部から基板を受け取ったときに基板の姿勢が異常な状態であるか否かを確実に検出すること。
【解決手段】前記フォーク3Aを基体31に沿って前進させ、ウエハWを保持する突き上げピン73に対して上昇させることにより、当該突き上げピン73上のウエハWをフォーク3Aに受け取る。このときに前記保持爪30A〜30Dの各々に設けられた歪みセンサ4A〜4Dにより、保持爪30A〜30Dに上から荷重が加わったときの当該保持爪30A〜30Dの歪み量を検出する。各々の歪みセンサの歪み量に基づいて、ウエハWの姿勢が正常であるか否かを判断し、ウエハWの姿勢が異常であると判断したときに、前記フォーク3Aの後退を禁止する。
(もっと読む)
アライナ
【課題】 スループットを向上することできるアライナを提供する。
【解決手段】 アライナ1は、ストッカ3と、アライメント機構4と、昇降機構5とを有する。ストッカ3は、25組の一対の支持部14,14を有する。一対の支持部14,14は、ウエハ2を支持可能に構成されている。これら一対の支持部14,14は、ウエハ2が上下方向に並ぶように上下方向に並設されている。ストッカ3は、これら一対の支持部14,14にウエハ2を支持させることで、複数のウエハ2をストックできるように構成されている。アライメント機構4は、このようにストックされたウエハ2の位置を調整する機能を有する。昇降機構5は、アライメント機構4をアライメントするウエハ2の所まで昇降させる機能を有する。
(もっと読む)
基板処理装置、基板処理方法及び記憶媒体
【課題】横並びに複数配置された載置台上の搬送容器から基板搬送機構により基板を取り出して処理を行うにあたり、載置台上の搬送容器内の基板の高さ位置を正確に求めること。
【解決手段】載置台11を複数配置すると共に、少なくとも2つの載置台11の並びに沿って前記大気搬送室22内を移動自在な撮像ユニット41を設けて、載置台11上のFOUP1内においてウエハWが収納される収納領域2全体を撮像ユニット41により一括して撮像し、この撮像結果に基づいて前記FOUP1内のウエハWの高さ位置を検出する。
(もっと読む)
1 - 20 / 96
[ Back to top ]