
Fターム[5F031JA02]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 手段(センサ) (4,555) | 光センサ (2,240)
Fターム[5F031JA02]の下位に属するFターム
ラインセンサ (93)
エリアセンサ、カメラ (579)
透過光検出 (318)
反射光検出 (743)
光路の形成 (91)
Fターム[5F031JA02]に分類される特許
121 - 140 / 416
基板搬送装置

【課題】構造を簡易にでき、占有面積を小さくできる枚葉式の基板搬送装置を提供すること。
【解決手段】枚葉式の基板搬送装置5は、第1枚葉ハンド45、第2枚葉ハンド46、第1進退機構、第2進退機構、一体移動機構、相対移動機構、および枚葉ハンド移動機構を備えている。第1進退機構は、第1水平方向D1に向かって第1枚葉ハンド45を進退させることができ、第2進退機構は、第1水平方向D1と正反対の第2水平方向D2に向かって第2枚葉ハンド46を進退させることができる。一体移動機構は、第1および第2枚葉ハンド45,46を鉛直方向に一体移動させることができ、相対移動機構は、第1および第2枚葉ハンド45,46を鉛直方向に相対移動させることができる。枚葉ハンド移動機構は、第1および第2枚葉ハンド45,46をX方向に一体移動させることができる。
(もっと読む)
スキャタロメトリ識別法を利用したオーバーレイ測定

【課題】半導体ウェーハの2つの層の間のアライメント・オーバーレイの非破壊特性決定方法を提供する。
【解決手段】波長または入射角度の関数としての1つの実施例として、入射ビームの放射は、ウェーハ表面上に向けられ、結果として得られる回折ビームの特性が決定される。スペクトル的、または角度的に分解された回折ビームは、オーバーレイ・フィーチャのアライメントと関連する。計算された回折スペクトルのライブラリは、オーバーレイ・アライメントにおける予期される変動の全ての範囲をモデル化することにより確立される。少なくとも2つの層におけるアライメント・ターゲットを有する実際のウェーハの検査により得られたスペクトルは、実際のアライメントの特性を決定するため、最も適合するもの(ベスト・フィット)を識別するように、ライブラリと比較される。比較の結果は、上流および/または下流処理制御への入力として使用される。
(もっと読む)
移動体装置、露光装置、及びデバイス製造方法
【課題】移動体を二次元平面に沿って精度良く案内すること。
【解決手段】 液晶露光装置では、2つの定盤12A,12B上にそれぞれベースパッド72A、72Bが配置され、且つベースパッド72A、72Bにより一枚のステップボード71が支持される。自重キャンセル装置40の装置本体60は、ステップボード71上を移動することによって、定盤12A上から定盤12B上に(又はその反対に)移動するので、分離して配置された隣接する定盤12Aと定盤12Bとの境界部は、自重キャンセル装置40が移動する際のガイド面として機能することがない。従って、2つの定盤12A,12Bを離間させて配置したにも関わらず、基板Pを保持する微動ステージ21をXY平面に沿って精度良く案内することができる。
(もっと読む)
基板処理装置
【課題】複数枚の基板の一括搬送および1枚の基板の枚葉搬送の切り換えに要する時間を短縮することができる基板処理装置を提供すること。
【解決手段】基板処理装置は、バッチハンド24によりフープ保持部に保持されたフープに対して複数枚の基板Wを一括して搬入および搬出するバッチ式の第1搬出入機構4と、第1および第2枚葉ハンド45,46によりそれぞれバッチハンド24およびフープに対して1枚の基板Wを搬入および搬出する枚葉式の第2搬出入機構5とを含む。
(もっと読む)
ウェーハの偏心補正方法及びウェーハ搬送装置
【課題】、簡易型アライメント装置の設置位置の自在化を高め、設置面積を縮小することができるウェーハの偏心補正方法及びウェーハ搬送装置を提供する。
【解決手段】ウェーハの移動機構として回転機構のみ有する簡易型アライメント装置でウェーハの偏心量を検出し、一方向に往復走行可能な基台と、その基台上で旋回自在に設けられる旋回軸と、その旋回軸に設けられ伸縮自在なアーム部と、そのアームの先端に設けられウェーハを把持するハンドとを有するウェーハ搬送ロボットを用いて、ウェーハの偏心を補正するウェーハの偏心補正方法において、ウェーハの偏心量を、基台の移動量、旋回軸の回転角及びアーム部の伸縮量のうち2つを用いた補正量に換算し、補正量に基づいて、基台の移動、旋回軸の回転及びアーム部の伸縮のうちいずれか2つを行うことによりウェーハの偏心を補正する。
(もっと読む)
プリアライナ装置を備えたウェハ搬送システム
【課題】組立調整に時間がかからない構成とし、ウェハ搬送装置とのウェハ受け渡し時間も大幅に短縮したプリアライナ装置によるウェハ搬送システムを提供すること。
【解決手段】ウェハを保持して回転させ、センサによって前記ウェハの外周を検出し、前記センサの検出情報を用いて少なくとも前記ウェハを所望の方向へと回転させるプリアライナ装置において、前記ウェハを保持する把持部材1に、前記ウェハの裏面と接触してこれを吸着保持する吸着面12が形成され、かつ前記ウェハを前記吸着面12へ搬送するウェハ搬送装置のエンドエフェクタ13が進入可能な凹部14が形成されたプリアライナ装置とした。
(もっと読む)
非接触でガラス板を把持する装置及び方法
本発明はガラス板を非接触で把持するための装置及び方法に関し、その装置は少なくとも1つの振動発生装置(8)を有し、振動する矩形の少なくとも1つの板状の振動板(1)を有する。前記振動板(1)は、その四隅の舌状の突起と、空気を吸い込むために用いられる吸引パイプ(2)を受け入れるための中央開口と、少なくとも1つの吸引管に取り付けられた距離センサ及び光学センサを備えている。  (もっと読む)
(もっと読む)
非接触基板処理
本発明の実施形態は、処理中に半導体基板を支持するか、位置決めするか、または回転させる装置および方法を提供する。本発明の一実施形態は、サセプタの基板受取り表面上に基板を位置決めすることと、1つまたは複数の回転ポートから流体の流れを送達することによってサセプタおよび基板を回転させることとを含む基板処理方法を提供する。  (もっと読む)
(もっと読む)
マルチテーブルリソグラフィシステム
リソグラフィ加工物処理装置は、加工物をロードするローディングエリア(108)と、加工物を処理する処理エリア(106)とを含む。加工物処理装置はさらに、ローディングエリアと処理エリアとの間に配置されたマルチテーブルシステム(10)を含む。マルチテーブルシステムは、ローディングエリアと処理エリアとの間を移動しながら、すれ違うように構成された少なくとも2つのテーブル(110,112)を含む。少なくとも2つのテーブルはそれぞれ、加工物を保持するように構成される。  (もっと読む)
(もっと読む)
ウェハのチャッキング装置およびチャッキング方法
【課題】ウェハの裏面から導通を確保する際に、ウェハの浮き上がりおよび位置ずれの発生を防止することができるとともにウェハをチャックから取り外したりする際に、残留電荷を可及的に減少させることのできるウェハのチャッキング装置およびチャッキング方法を提供する。
【解決手段】チャッキング装置は、第1および第2電極4,6と、ウェハの裏面が載置される絶縁体部8と、絶縁体部の裏面から主面に貫通する貫通孔と有する静電チャック部2と、貫通孔を通過可能な導通針20と、導通針を絶縁体部の裏面から主面に向かって貫通孔内を移動させてウェハの裏面に導通針の他端を突き立てるように駆動する導通針駆動装置24と、第1および第2電極に極性が異なる電圧および極性が同じ電圧を与えることが可能で、かつ第1および第2電極に与える電圧の値を可変とすることの可能な電圧コントローラ10とを備える。
(もっと読む)
保持用治具およびこれを備えた吸着装置
【課題】 半導体ウエハなどの被保持体の絶縁破壊を抑制し、かつパーティクルの付着を特に抑制できる保持用治具および吸着装置を提供すること。
【解決手段】 半導電性を有するセラミックスからなる支持体16に吸気路2を形成した保持用治具20であって、吸気路2の表面4は支持体16における他の表面6より表面抵抗値が小さい領域を有している保持用治具20とする。また、この保持用治具20を備え、この保持用治具20の吸気路2の吸気により、支持体16の外表面6に対して表面抵抗値が小さい被保持体を吸着可能とした吸着装置とする。
(もっと読む)
基板冷却ステージ及び半導体製造装置
【課題】基板を冷却するにあたり、その基板の変形を抑えることができる基板冷却ステージを提供すること。
【解決手段】本発明の基板冷却ステージは、基板の裏面がその表面に接するかまたは近接する台座部と、基板を冷却するために前記台座部の表面を冷却する冷却手段と、前記台座部にて前記基板に接するかまたは近接する領域の全周に亘って、あるいはその周方向に沿った複数箇所に設けられ、上方外方側へ向かって傾斜するように伸びると共に基板の周縁を下方にガイドするための傾斜ガイド部材とを備えており、所定の温度になるまで放熱されていない基板が台座部に近接することが防がれるので、基板が急激に冷却されて変形してしまうことを抑えることができる。また、前記冷却手段の他にガスを供給して基板を冷却する場合、そのガス供給レシピを基板に形成されている膜に応じて設定する必要が無くなるので有利である。
(もっと読む)
ウェハのアライメント装置
【課題】ウェハ裏面のパーティクル付着が極めて少なく、アライメント時間が短いプリアライナを提供することを目的とする。
【解決手段】ウェハを保持して旋回させる機構が、ウェハが載置されるパッド5と、前記ウェハの側面を把持可能なクランプ14と、パッド5とクランプ14の両方を支持して回転する旋回ベース2と、を備え、クランプ14が、パッド5に載置されたウェハに対して、上昇位置でウェハの側面を把持し、下降位置でウェハの裏面よりも低い位置に移動するよう、旋回ベース2に対して昇降自在に支持されるよう構成した。
(もっと読む)
半導体ウエハのアライメント装置
【課題】自重で撓み変形する程度に薄型化されたウエハの周縁の位置を正確に計測し、ウエハ位置決めを正確な行うことができるアライメント装置を提供する。
【解決手段】半導体ウエハWの外形以上の大きさを有する保持ステージ1と、保持ステージ1に載置されて吸着保持された半導体ウエハWの周縁位置を光学的に検知する光センサ2とを備えている。保持ステージ1は、例えば、その周縁に載置された半導体ウエハWの外周部に臨むスリット10を上下に貫通して形成する。このスリット10を上下から挟んで対向配備された投光器2aと受光器2bとからなる透過型の光センサ2でスリット10の部分で保持ステージ1から露出するウエハWの周縁を計測する。
(もっと読む)
位置測定装置、成膜方法並びに成膜プログラム及び成膜装置
【課題】一方向からの測定によって対象物の位置情報を精度よく取得することを課題とする。
【解決手段】成膜装置1000が有する位置測定装置1100は、基板400が有する測定対象平面400a上の3つの測定点400a1、400a2、400a3に対し、測定点までの水平方向の距離をそれぞれ測定する測距部を備える。測距部は、3つの変位センサ1110、1120、1130を有する。これらの変位センサ1110、1120、1130は、垂直仮想平面600に正対するように配置される。位置測定装置1100は、水平方向から基板400の測定対象平面400aの投影画像を撮像する撮像部を備えている。撮像部は、画像センサ1150と、この画像センサ1150が接続された画像取得部1160を備えている。
(もっと読む)
基板収納方法及び記憶媒体
【課題】既存の設備を利用してフープ内を清浄化し、ウエハの汚染を防止して歩留まり率を向上させることができる基板収納方法を提供する。
【解決手段】基板処理システム10は、ウエハWにRIE処理を施すプロセスシップ11と、ウエハWを収納するフープ14a〜14cと、プロセスシップ11とフープ14a〜14cとを連結するローダーモジュール13及びローダーモジュール13内に設けられた搬送アーム機構19と、ローダーモジュール13内にダウンフローを形成して異物を底部から排出するFFU34と、ローダーモジュール13とフープ14a〜14cとの連結部に設けられた開閉扉とを有する。基板処理システム10のフープ14bにウエハWを収納する際、搬送アーム機構19によってウエハWをフープ14b内に搬入し、その後、所定の遅延時間が経過するまで開閉扉を開放状態のまま保持する。
(もっと読む)
ロボットおよびロボットの電気エンドエフェクタに電気的に接続するシステム、装置、および方法
ロボット装置内で電気エンドエフェクタへの電気的接続を可能にするシステム、装置、および方法が開示される。一態様では、電気的結合は、真空チャンバ内で電気エンドエフェクタに電力を提供する。電気的結合は、係合する電気接点を含むことができる。いくつかの実施形態では、接点の少なくとも1つは、ロボットのアームの回転中に係合する接点が互いに対して回転しないように、ばねにつるすことができる。他の実施形態では、誘導結合されたコイルが含まれる。多数の他の態様が提供される。  (もっと読む)
(もっと読む)
ガラスシートを高速で輸送する方法及び装置
本発明は、光電池素子の製造のための大規模生産プラントにおける異なる生産ステーション間でガラスシートを高速輸送するための方法及び装置に関し、前記生産プラントはクリーンルーム条件を前提とし、a)昇降ガントリーを搬送するための自由に移動可能な台座と、b)伸縮自在なジャッキ板によってガラスシートを垂直方向に輸送するための少なくとも1つの垂直昇降籠であって、前記板は2つの反対方向に伸張可能であり、局部的に下降及び上昇する機能を有し、ガラスシートを連続的に、前記垂直昇降籠の一方から他方に輸送することができ、c)クリーンルームにおける運転のために、耐摩耗性材料で製造され、排気を出さないようにカプセルに包まれた機械的な動作部分、及びd)台座を動作させるためのケーブルレス電力供給ユニットを備えたことを特徴とする。 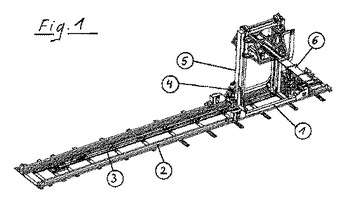 (もっと読む)
(もっと読む)
傾き調整方法および傾き調整装置並びにその傾き調整方法において調整されるデバイス
【課題】対向配置された対象物同士の相対的な傾きをを高精度にかつ容易に調整することができる傾き調整の技術を提供することを目的とする。
【解決手段】基板55には第1検出部である電極が形成され、基板56には第2検出部である電極が基板55の電極と対を構成する位置に形成されている。そして、基板55および基板56をステージ部15の保持部29およびヘッド部39の保持部44にそれぞれ保持し、基板55および基板56の電極の対の間の静電容量を検出部50により検出する。そして、検出された静電容量が所定の値になるように、X−Yテーブル制御部52によってX−Yステージ機構11を移動させ、基板55および基板56の相対的な傾きを調整する。
(もっと読む)
薄板の搬送面接触状態検出方法
【課題】事前の煩雑な準備を必要とせずに、搬送面から浮上させて搬送方向に搬送される薄板の搬送状態を、インラインにより検出すること。
【解決手段】浮上搬送装置10により搬送される薄板Wと搬送面Sとの空間を、搬送方向Xの全体に亘って1又は複数のレーザレーダヘッド3からの走査光Lによって走査し、走査光Lの光路上に存在する物体からの走査光Lの反射光Rによって、走査光Lの出力元のレーザレーダヘッド3からの、その物体の方向及び距離を特定する。そして、特定した方向及び距離によって、薄板Wの搬送面Sに対する接触箇所や搬送ユニット11の構成物の位置を特定する。そのうち、搬送中の薄板Wよりも手前か奥に配置されている搬送ユニット11の構成物の位置を検出対象から除外し、残る、薄板Wの搬送面Sに対する接触箇所の位置だけを最終的に検出する。
(もっと読む)
121 - 140 / 416
[ Back to top ]